
23 Jun 2015

The trajectories of the -Kepler problem at level are
completely determined. It is found in particular that a non-colliding
trajectory is an ellipse, a parabola or a branch of hyperbola according as the
total energy is negative, zero or positive. Moreover, it is shown that the
group acts transitively on both the
set of oriented elliptic trajectories and the set of oriented parabolic
trajectories. The method employed here is similar to the one used by
Levi-Civita in the study of planar Kepler problem in 1920.
03 Jun 2025

In situ tissue biopsy with an endoluminal catheter is an efficient approach
for disease diagnosis, featuring low invasiveness and few complications.
However, the endoluminal catheter struggles to adjust the biopsy direction by
distal endoscope bending or proximal twisting for tissue sampling within the
tortuous luminal organs, due to friction-induced hysteresis and narrow spaces.
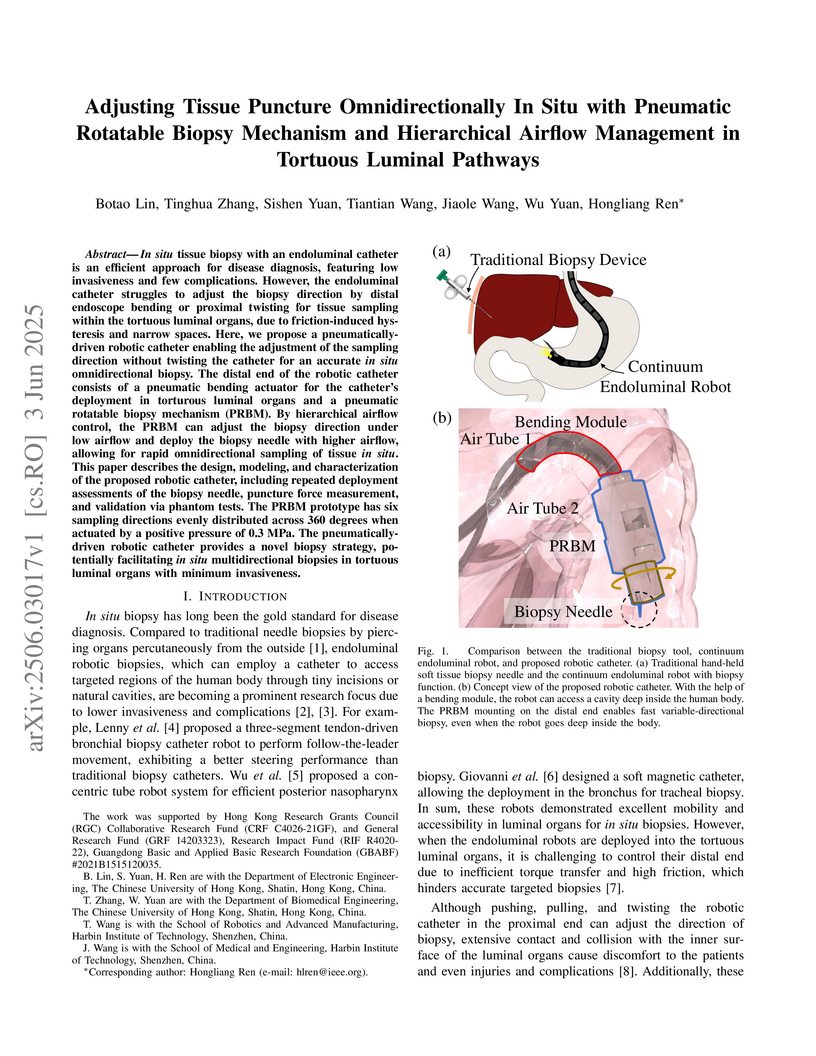
Here, we propose a pneumatically-driven robotic catheter enabling the
adjustment of the sampling direction without twisting the catheter for an
accurate in situ omnidirectional biopsy. The distal end of the robotic catheter
consists of a pneumatic bending actuator for the catheter's deployment in
torturous luminal organs and a pneumatic rotatable biopsy mechanism (PRBM). By
hierarchical airflow control, the PRBM can adjust the biopsy direction under
low airflow and deploy the biopsy needle with higher airflow, allowing for
rapid omnidirectional sampling of tissue in situ. This paper describes the
design, modeling, and characterization of the proposed robotic catheter,
including repeated deployment assessments of the biopsy needle, puncture force
measurement, and validation via phantom tests. The PRBM prototype has six
sampling directions evenly distributed across 360 degrees when actuated by a
positive pressure of 0.3 MPa. The pneumatically-driven robotic catheter
provides a novel biopsy strategy, potentially facilitating in situ
multidirectional biopsies in tortuous luminal organs with minimum invasiveness.
There are no more papers matching your filters at the moment.
