Ask or search anything...
History-Aware Visuomotor Policy Learning via Point Tracking
21 Sep 2025
 Shanghai Jiao Tong University
Shanghai Jiao Tong UniversityResearchers from Shanghai Jiao Tong University and Flexiv Robotics introduce an object-centric history representation for visuomotor policies, utilizing 3D point tracking on task-relevant objects to create compact, learnable history tokens. This method significantly enhances robot decision-making and task success rates on complex, non-Markovian manipulation tasks, with HistRISE achieving 97% decision accuracy on "Swap-Hard" and 100% on "Three-Scoop" in real-world experiments.
View blog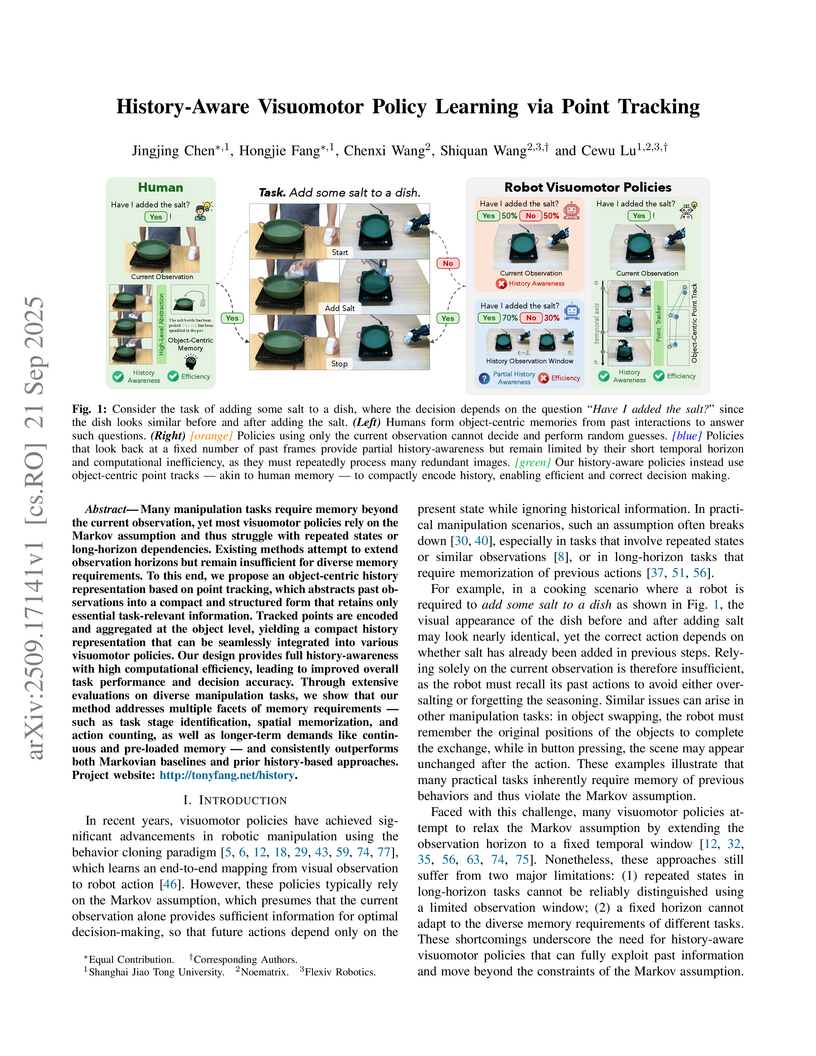
Learning Dexterous Manipulation with Quantized Hand State
 Carnegie Mellon University
Carnegie Mellon UniversityDexterous robotic hands enable robots to perform complex manipulations that require fine-grained control and adaptability. Achieving such manipulation is challenging because the high degrees of freedom tightly couple hand and arm motions, making learning and control difficult. Successful dexterous manipulation relies not only on precise hand motions, but also on accurate spatial positioning of the arm and coordinated arm-hand dynamics. However, most existing visuomotor policies represent arm and hand actions in a single combined space, which often causes high-dimensional hand actions to dominate the coupled action space and compromise arm control. To address this, we propose DQ-RISE, which quantizes hand states to simplify hand motion prediction while preserving essential patterns, and applies a continuous relaxation that allows arm actions to diffuse jointly with these compact hand states. This design enables the policy to learn arm-hand coordination from data while preventing hand actions from overwhelming the action space. Experiments show that DQ-RISE achieves more balanced and efficient learning, paving the way toward structured and generalizable dexterous manipulation. Project website: this http URL

Learning Dexterous Manipulation with Quantized Hand State
Dexterous robotic hands enable robots to perform complex manipulations that require fine-grained control and adaptability. Achieving such manipulation is challenging because the high degrees of freedom tightly couple hand and arm motions, making learning and control difficult. Successful dexterous manipulation relies not only on precise hand motions, but also on accurate spatial positioning of the arm and coordinated arm-hand dynamics. However, most existing visuomotor policies represent arm and hand actions in a single combined space, which often causes high-dimensional hand actions to dominate the coupled action space and compromise arm control. To address this, we propose DQ-RISE, which quantizes hand states to simplify hand motion prediction while preserving essential patterns, and applies a continuous relaxation that allows arm actions to diffuse jointly with these compact hand states. This design enables the policy to learn arm-hand coordination from data while preventing hand actions from overwhelming the action space. Experiments show that DQ-RISE achieves more balanced and efficient learning, paving the way toward structured and generalizable dexterous manipulation. Project website: this http URL

History-Aware Visuomotor Policy Learning via Point Tracking
21 Sep 2025
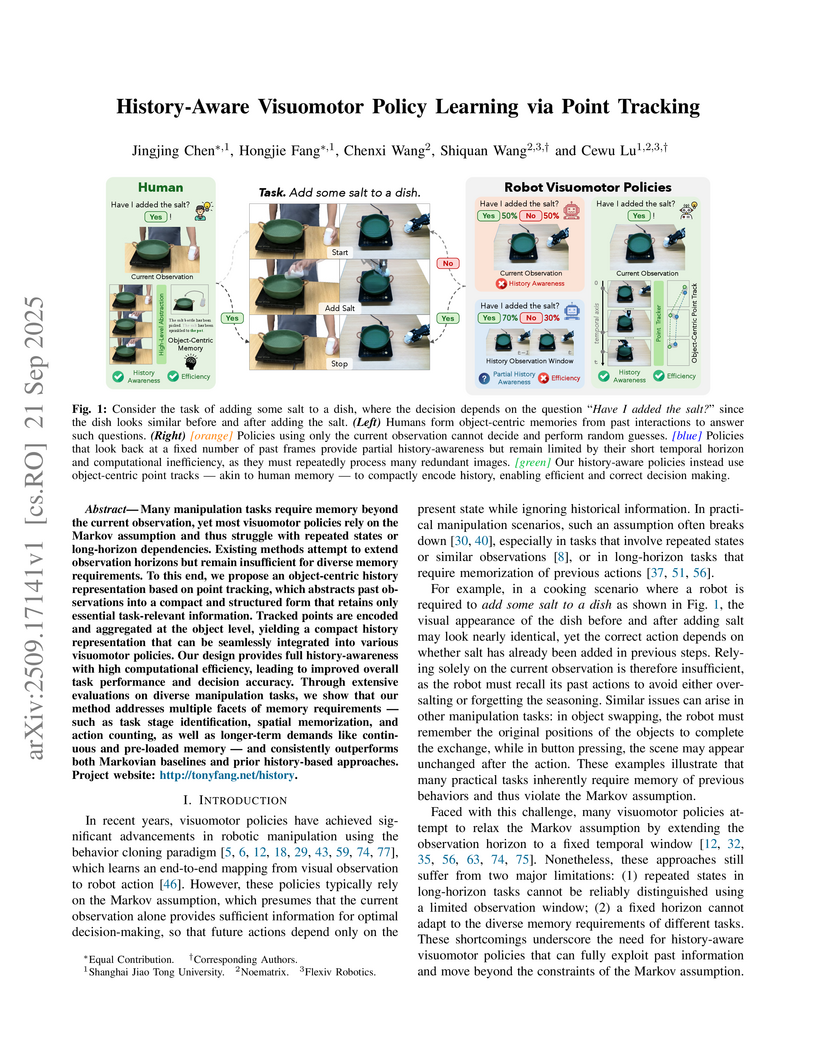
Many manipulation tasks require memory beyond the current observation, yet most visuomotor policies rely on the Markov assumption and thus struggle with repeated states or long-horizon dependencies. Existing methods attempt to extend observation horizons but remain insufficient for diverse memory requirements. To this end, we propose an object-centric history representation based on point tracking, which abstracts past observations into a compact and structured form that retains only essential task-relevant information. Tracked points are encoded and aggregated at the object level, yielding a compact history representation that can be seamlessly integrated into various visuomotor policies. Our design provides full history-awareness with high computational efficiency, leading to improved overall task performance and decision accuracy. Through extensive evaluations on diverse manipulation tasks, we show that our method addresses multiple facets of memory requirements - such as task stage identification, spatial memorization, and action counting, as well as longer-term demands like continuous and pre-loaded memory - and consistently outperforms both Markovian baselines and prior history-based approaches. Project website: this http URL
There are no more papers matching your filters at the moment.