Ask or search anything...
MAPLE: Encoding Dexterous Robotic Manipulation Priors Learned From Egocentric Videos
08 Dec 2025
 ETH Zürich
ETH Zürich Microsoft
MicrosoftThe MAPLE framework from ETH Zurich, Mimic Robotics, and Microsoft Research develops a visual encoder that learns fine-grained dexterous manipulation priors, specifically hand-object contact points and 3D hand poses, directly from large-scale egocentric videos. This approach leads to a 31.9% mean success rate across diverse simulation tasks and superior real-world performance on a dexterous robotic hand, achieving 69% success on the Sponge task, by providing manipulation-aware visual features.
View blog
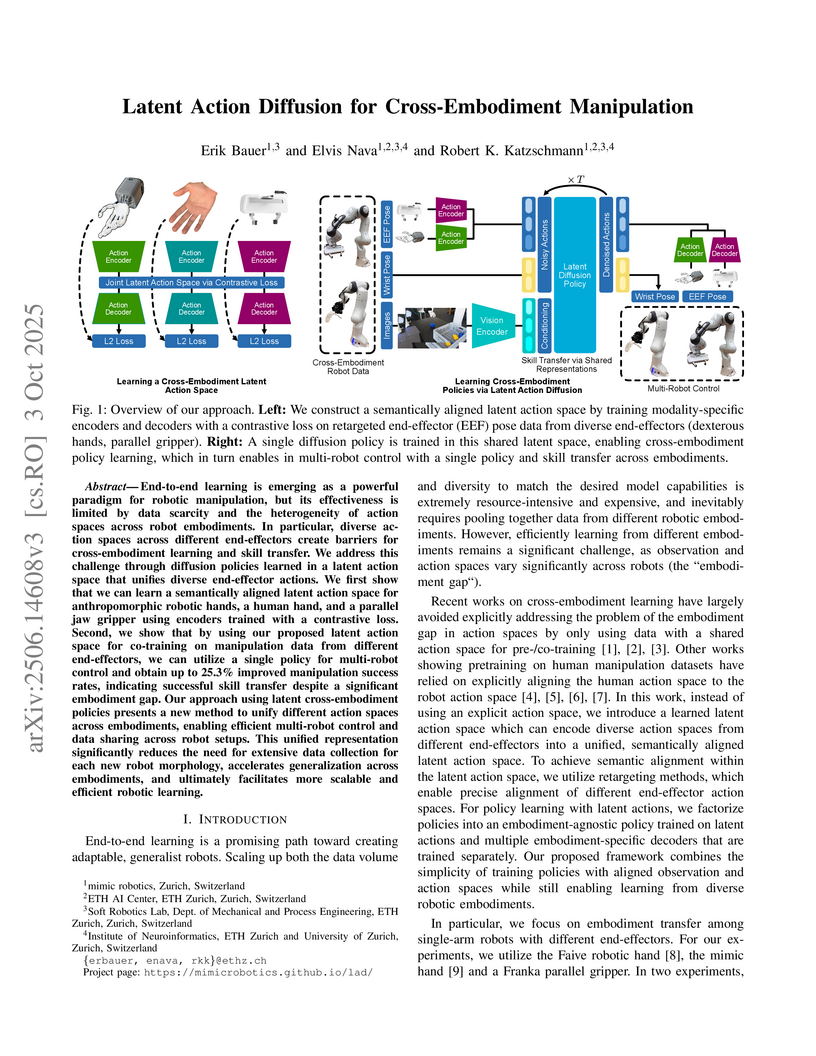
Latent Action Diffusion for Cross-Embodiment Manipulation
03 Oct 2025
 ETH Zurich
ETH ZurichEnd-to-end learning is emerging as a powerful paradigm for robotic manipulation, but its effectiveness is limited by data scarcity and the heterogeneity of action spaces across robot embodiments. In particular, diverse action spaces across different end-effectors create barriers for cross-embodiment learning and skill transfer. We address this challenge through diffusion policies learned in a latent action space that unifies diverse end-effector actions. We first show that we can learn a semantically aligned latent action space for anthropomorphic robotic hands, a human hand, and a parallel jaw gripper using encoders trained with a contrastive loss. Second, we show that by using our proposed latent action space for co-training on manipulation data from different end-effectors, we can utilize a single policy for multi-robot control and obtain up to 25.3% improved manipulation success rates, indicating successful skill transfer despite a significant embodiment gap. Our approach using latent cross-embodiment policies presents a new method to unify different action spaces across embodiments, enabling efficient multi-robot control and data sharing across robot setups. This unified representation significantly reduces the need for extensive data collection for each new robot morphology, accelerates generalization across embodiments, and ultimately facilitates more scalable and efficient robotic learning.
mimic-one: a Scalable Model Recipe for General Purpose Robot Dexterity
13 Jun 2025
We present a diffusion-based model recipe for real-world control of a highly
dexterous humanoid robotic hand, designed for sample-efficient learning and
smooth fine-motor action inference. Our system features a newly designed 16-DoF
tendon-driven hand, equipped with wide angle wrist cameras and mounted on a
Franka Emika Panda arm. We develop a versatile teleoperation pipeline and data
collection protocol using both glove-based and VR interfaces, enabling
high-quality data collection across diverse tasks such as pick and place, item
sorting and assembly insertion. Leveraging high-frequency generative control,
we train end-to-end policies from raw sensory inputs, enabling smooth,
self-correcting motions in complex manipulation scenarios. Real-world
evaluations demonstrate up to 93.3% out of distribution success rates, with up
to a +33.3% performance boost due to emergent self-correcting behaviors, while
also revealing scaling trends in policy performance. Our results advance the
state-of-the-art in dexterous robotic manipulation through a fully integrated,
practical approach to hardware, learning, and real-world deployment.

There are no more papers matching your filters at the moment.