
01 Mar 2024

The human brain's plasticity allows for the integration of artificial body parts into the human body. Leveraging this, embodied systems realize intuitive interactions with the environment. We introduce a novel concept: embodied swarm robots. Swarm robots constitute a collective of robots working in harmony to achieve a common objective, in our case, serving as functional body parts. Embodied swarm robots can dynamically alter their shape, density, and the correspondences between body parts and individual robots. We contribute an investigation of the influence on embodiment of swarm robot-specific factors derived from these characteristics, focusing on a hand. Our paper is the first to examine these factors through virtual reality (VR) and real-world robot studies to provide essential design considerations and applications of embodied swarm robots. Through quantitative and qualitative analysis, we identified a system configuration to achieve the embodiment of swarm robots.
26 May 2025
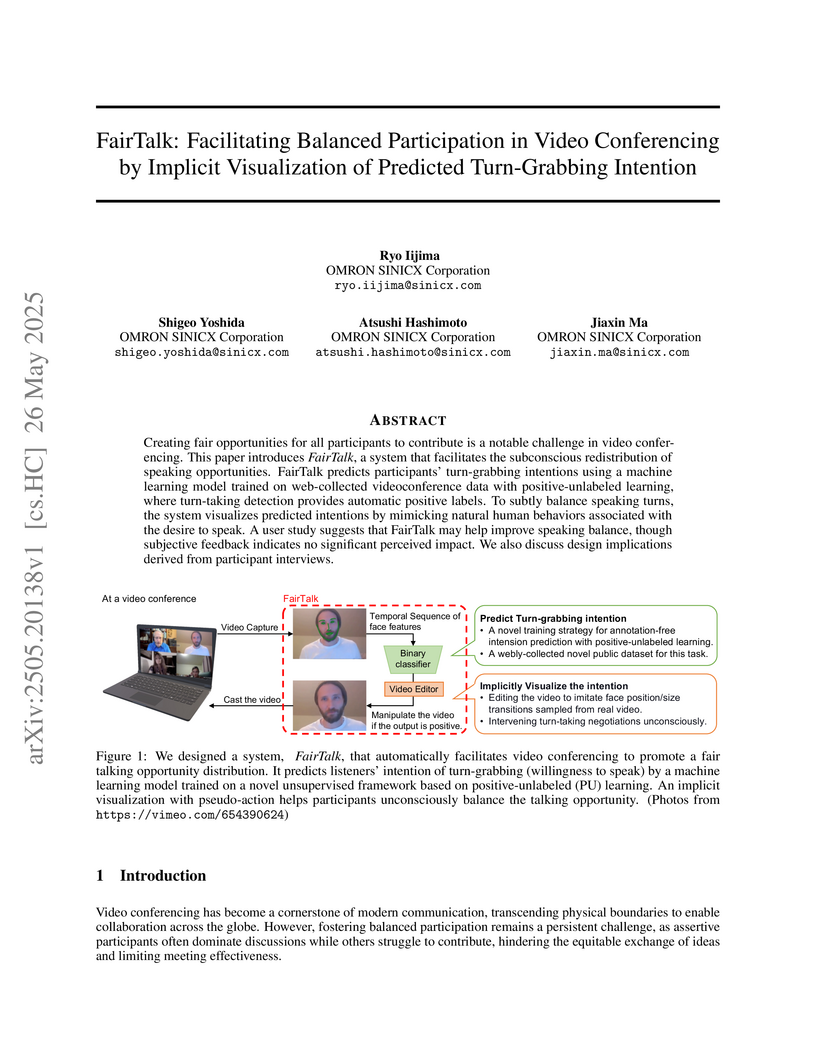
Creating fair opportunities for all participants to contribute is a notable
challenge in video conferencing. This paper introduces FairTalk, a system that
facilitates the subconscious redistribution of speaking opportunities. FairTalk
predicts participants' turn-grabbing intentions using a machine learning model
trained on web-collected videoconference data with positive-unlabeled learning,
where turn-taking detection provides automatic positive labels. To subtly
balance speaking turns, the system visualizes predicted intentions by mimicking
natural human behaviors associated with the desire to speak. A user study
suggests that FairTalk may help improve speaking balance, though subjective
feedback indicates no significant perceived impact. We also discuss design
implications derived from participant interviews.
There are no more papers matching your filters at the moment.
