
15 Sep 2025
X SQUARE ROBOT introduced WALL-OSS, an end-to-end embodied foundation model that systematically bridges the gaps between vision-language models and embodied AI through a tightly coupled architecture and multi-stage training. It demonstrates superior performance in embodied scene understanding, zero-shot instruction following, and complex robotic manipulation tasks.
07 Dec 2025



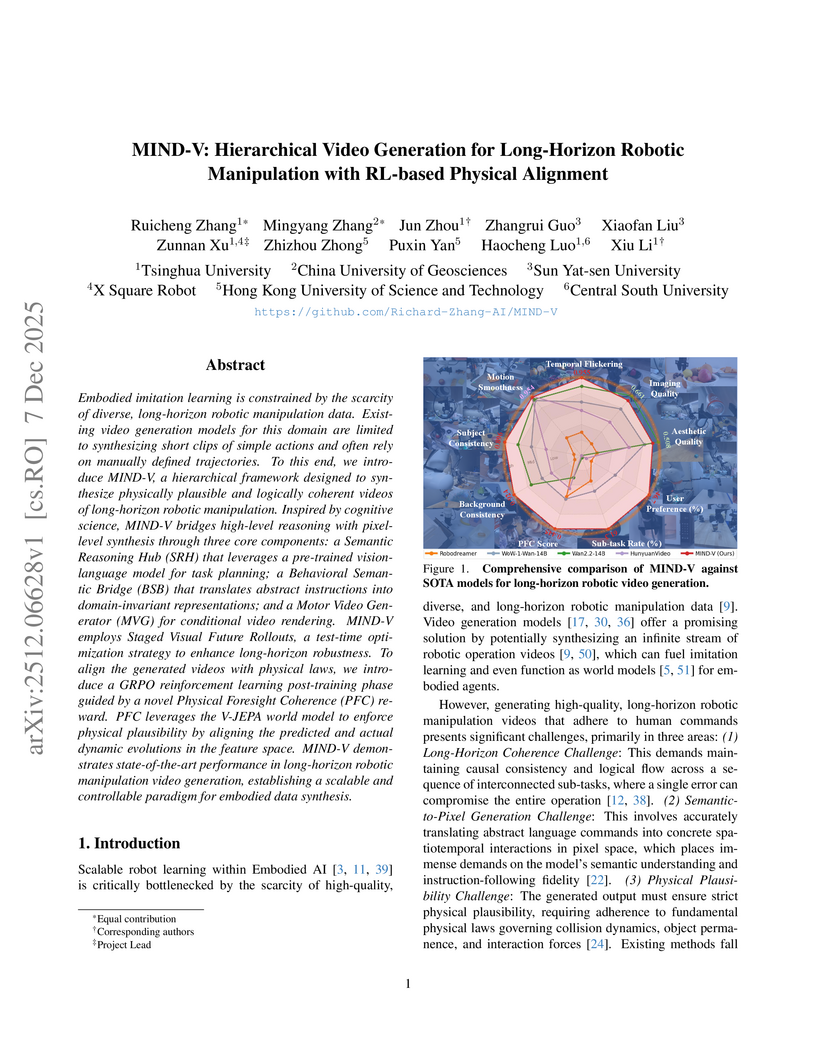
MIND-V introduces a hierarchical video generation framework for long-horizon robotic manipulation, autonomously synthesizing physically plausible and logically coherent operation videos. It employs a multi-stage architecture with reinforcement learning for physical alignment, providing a scalable method for generating robot training data.

15 Sep 2025
While foundation models show remarkable progress in language and vision, existing vision-language models (VLMs) still have limited spatial and embodiment understanding. Transferring VLMs to embodied domains reveals fundamental mismatches between modalities, pretraining distributions, and training objectives, leaving action comprehension and generation as a central bottleneck on the path to AGI.
We introduce WALL-OSS, an end-to-end embodied foundation model that leverages large-scale multimodal pretraining to achieve (1) embodiment-aware vision-language understanding, (2) strong language-action association, and (3) robust manipulation capability.
Our approach employs a tightly coupled architecture and multi-strategies training curriculum that enables Unified Cross-Level CoT-seamlessly unifying instruction reasoning, subgoal decomposition, and fine-grained action synthesis within a single differentiable framework.
Our results show that WALL-OSS attains high success on complex long-horizon manipulations, demonstrates strong instruction-following capabilities, complex understanding and reasoning, and outperforms strong baselines, thereby providing a reliable and scalable path from VLMs to embodied foundation models.
There are no more papers matching your filters at the moment.
