
11 Jul 2024

Control systems used in Minimally Invasive Surgery (MIS) play a crucial role in ensuring preci-sion and safety throughout procedures. This paper presents a control architecture developed for a robotic system designed for MIS operations. The modular structure of the control system allows for compatibility with a range of procedures in abdominal and thoracic regions. The proposed control system, employing the master-slave concept, is presented alongside the experimental model. Functional validation is obtained by performing a Siemens NX simulation and comparing the results with several experimental runs using the experimental model of the robot. With its compact size and stiffness, the system holds promise for integration with other robotic systems. Future efforts will be dedicated to exploring and optimizing this potential collaboration to enhance the overall capabilities of robotic-assisted surgery.

17 Apr 2024
The paper presents the methodology used for accuracy and repeatability
measurements of the experimental model of a parallel robot developed for
surgical applications. The experimental setup uses a motion tracking system
(for accuracy) and a high precision measuring arm for position (for
repeatability). The accuracy was obtained by comparing the trajectory data from
the experimental measurement with a baseline trajectory defined with the
kinematic models of the parallel robotic system. The repeatability was
experi-mentally determined by moving (repeatedly) the robot platform in
predefined points.
26 Aug 2025
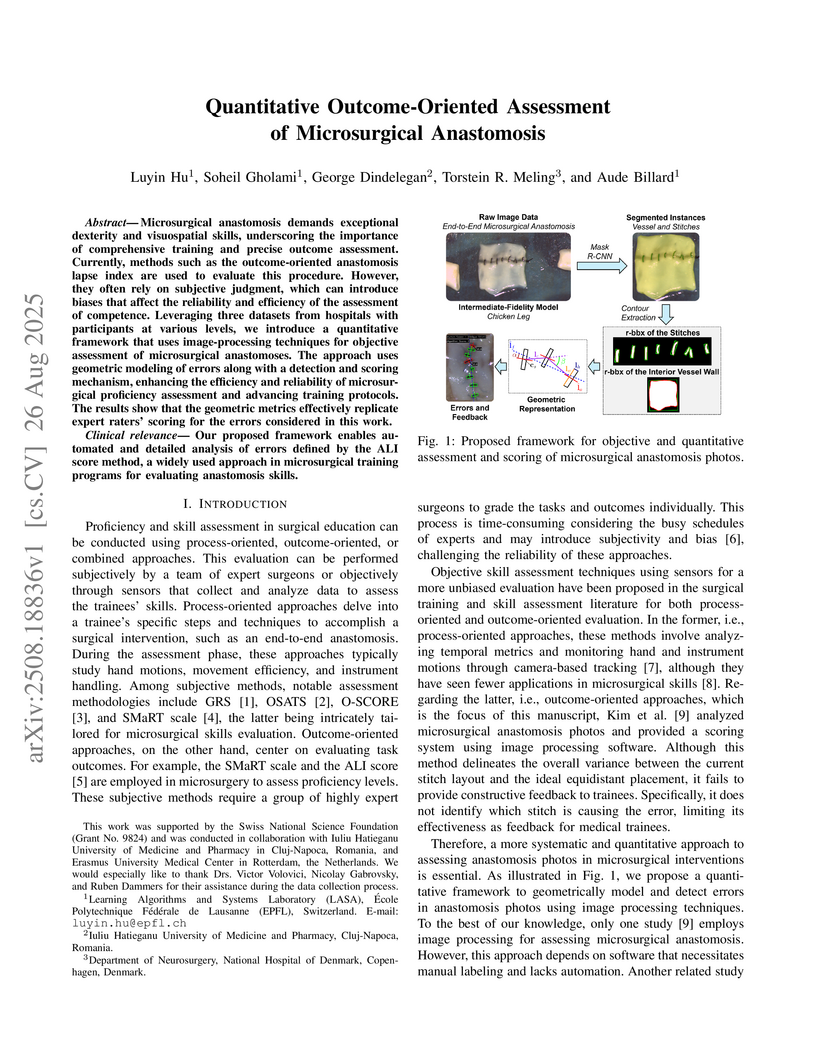
Microsurgical anastomosis demands exceptional dexterity and visuospatial skills, underscoring the importance of comprehensive training and precise outcome assessment. Currently, methods such as the outcome-oriented anastomosis lapse index are used to evaluate this procedure. However, they often rely on subjective judgment, which can introduce biases that affect the reliability and efficiency of the assessment of competence. Leveraging three datasets from hospitals with participants at various levels, we introduce a quantitative framework that uses image-processing techniques for objective assessment of microsurgical anastomoses. The approach uses geometric modeling of errors along with a detection and scoring mechanism, enhancing the efficiency and reliability of microsurgical proficiency assessment and advancing training protocols. The results show that the geometric metrics effectively replicate expert raters' scoring for the errors considered in this work.
There are no more papers matching your filters at the moment.
