15 Oct 2025

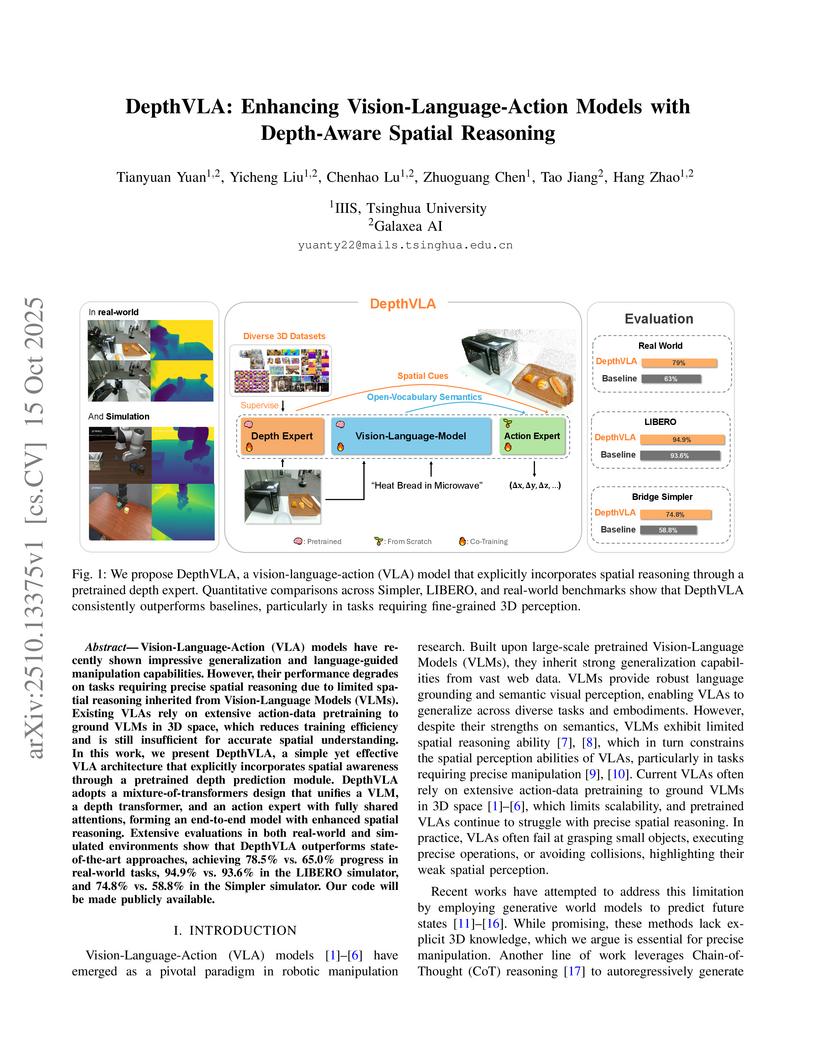
DepthVLA enhances Vision-Language-Action (VLA) models by integrating a pretrained depth prediction module within a mixture-of-transformers architecture, improving spatial reasoning for robotic manipulation tasks. The approach yields superior performance, achieving a 74.8% success rate on the simulated WidowX benchmark and a 79% average progress score on a real-world robotic platform.

08 Dec 2025


FASTER is a unified framework featuring a learnable action tokenizer (FASTerVQ) and an efficient autoregressive policy (FASTerVLA) for robotic manipulation. It achieves state-of-the-art performance with a 97.9% success rate on Libero and significantly reduces inference latency to 112ms, enabling efficient real-time control for complex tasks.

03 Jun 2025

Recent success in legged robot locomotion is attributed to the integration of
reinforcement learning and physical simulators. However, these policies often
encounter challenges when deployed in real-world environments due to
sim-to-real gaps, as simulators typically fail to replicate visual realism and
complex real-world geometry. Moreover, the lack of realistic visual rendering
limits the ability of these policies to support high-level tasks requiring
RGB-based perception like ego-centric navigation. This paper presents a
Real-to-Sim-to-Real framework that generates photorealistic and physically
interactive "digital twin" simulation environments for visual navigation and
locomotion learning. Our approach leverages 3D Gaussian Splatting (3DGS) based
scene reconstruction from multi-view images and integrates these environments
into simulations that support ego-centric visual perception and mesh-based
physical interactions. To demonstrate its effectiveness, we train a
reinforcement learning policy within the simulator to perform a visual
goal-tracking task. Extensive experiments show that our framework achieves
RGB-only sim-to-real policy transfer. Additionally, our framework facilitates
the rapid adaptation of robot policies with effective exploration capability in
complex new environments, highlighting its potential for applications in
households and factories.
There are no more papers matching your filters at the moment.
