Ask or search anything...
LaSOT: A High-quality Large-scale Single Object Tracking Benchmark
12 Sep 2020
Despite great recent advances in visual tracking, its further development, including both algorithm design and evaluation, is limited due to lack of dedicated large-scale benchmarks. To address this problem, we present LaSOT, a high-quality Large-scale Single Object Tracking benchmark. LaSOT contains a diverse selection of 85 object classes, and offers 1,550 totaling more than 3.87 million frames. Each video frame is carefully and manually annotated with a bounding box. This makes LaSOT, to our knowledge, the largest densely annotated tracking benchmark. Our goal in releasing LaSOT is to provide a dedicated high quality platform for both training and evaluation of trackers. The average video length of LaSOT is around 2,500 frames, where each video contains various challenge factors that exist in real world video footage,such as the targets disappearing and re-appearing. These longer video lengths allow for the assessment of long-term trackers. To take advantage of the close connection between visual appearance and natural language, we provide language specification for each video in LaSOT. We believe such additions will allow for future research to use linguistic features to improve tracking. Two protocols, full-overlap and one-shot, are designated for flexible assessment of trackers. We extensively evaluate 48 baseline trackers on LaSOT with in-depth analysis, and results reveal that there still exists significant room for improvement. The complete benchmark, tracking results as well as analysis are available at this http URL.
LaSOT: A High-quality Benchmark for Large-scale Single Object Tracking
27 Mar 2019
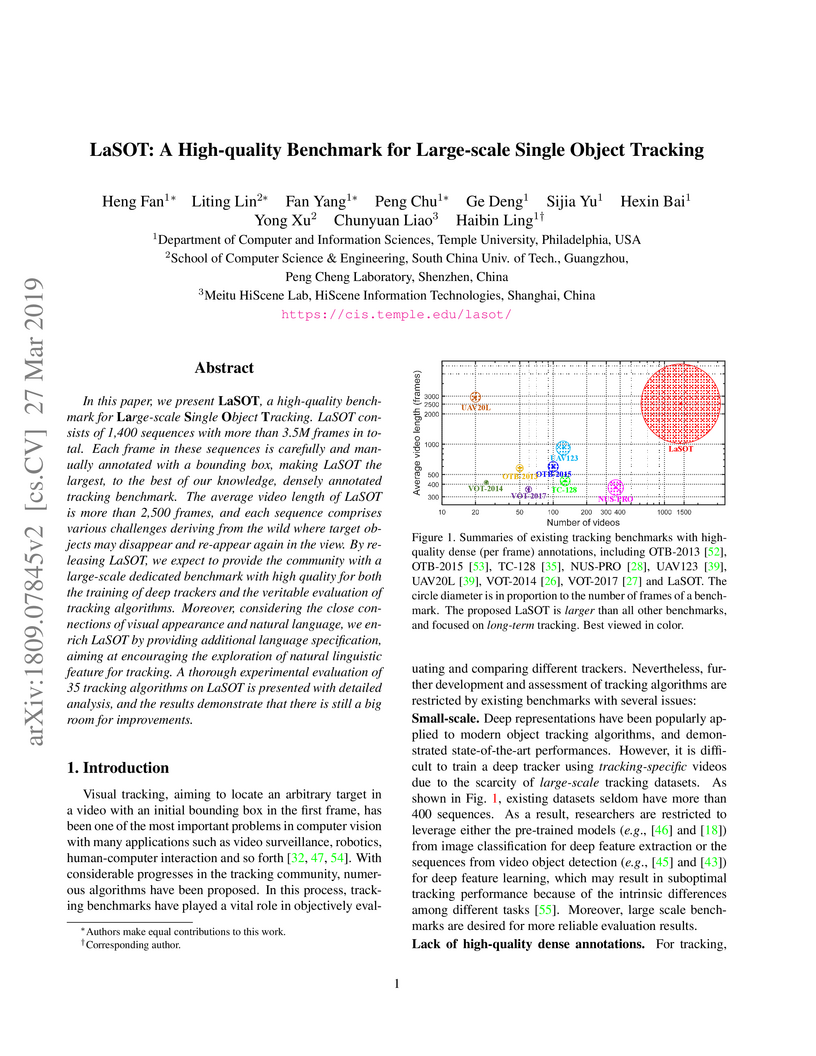
In this paper, we present LaSOT, a high-quality benchmark for Large-scale Single Object Tracking. LaSOT consists of 1,400 sequences with more than 3.5M frames in total. Each frame in these sequences is carefully and manually annotated with a bounding box, making LaSOT the largest, to the best of our knowledge, densely annotated tracking benchmark. The average video length of LaSOT is more than 2,500 frames, and each sequence comprises various challenges deriving from the wild where target objects may disappear and re-appear again in the view. By releasing LaSOT, we expect to provide the community with a large-scale dedicated benchmark with high quality for both the training of deep trackers and the veritable evaluation of tracking algorithms. Moreover, considering the close connections of visual appearance and natural language, we enrich LaSOT by providing additional language specification, aiming at encouraging the exploration of natural linguistic feature for tracking. A thorough experimental evaluation of 35 tracking algorithms on LaSOT is presented with detailed analysis, and the results demonstrate that there is still a big room for improvements.
StructVIO : Visual-inertial Odometry with Structural Regularity of Man-made Environments
 Shanghai Jiao Tong University
Shanghai Jiao Tong UniversityWe propose a novel visual-inertial odometry approach that adopts structural
regularity in man-made environments. Instead of using Manhattan world
assumption, we use Atlanta world model to describe such regularity. An Atlanta
world is a world that contains multiple local Manhattan worlds with different
heading directions. Each local Manhattan world is detected on-the-fly, and
their headings are gradually refined by the state estimator when new
observations are coming. With fully exploration of structural lines that
aligned with each local Manhattan worlds, our visual-inertial odometry method
become more accurate and robust, as well as much more flexible to different
kinds of complex man-made environments. Through extensive benchmark tests and
real-world tests, the results show that the proposed approach outperforms
existing visual-inertial systems in large-scale man-made environments
Planar Object Tracking in the Wild: A Benchmark
22 May 2018
Planar object tracking is an actively studied problem in vision-based robotic applications. While several benchmarks have been constructed for evaluating state-of-the-art algorithms, there is a lack of video sequences captured in the wild rather than in constrained laboratory environment. In this paper, we present a carefully designed planar object tracking benchmark containing 210 videos of 30 planar objects sampled in the natural environment. In particular, for each object, we shoot seven videos involving various challenging factors, namely scale change, rotation, perspective distortion, motion blur, occlusion, out-of-view, and unconstrained. The ground truth is carefully annotated semi-manually to ensure the quality. Moreover, eleven state-of-the-art algorithms are evaluated on the benchmark using two evaluation metrics, with detailed analysis provided for the evaluation results. We expect the proposed benchmark to benefit future studies on planar object tracking.

There are no more papers matching your filters at the moment.