Ask or search anything...
ARMADA: Autonomous Online Failure Detection and Human Shared Control Empower Scalable Real-world Deployment and Adaptation
 Shanghai Jiao Tong University
Shanghai Jiao Tong UniversityARMADA introduces a system for scalable real-world deployment and rapid adaptation of visuomotor robot policies by integrating an autonomous failure detector and a multi-robot shared control framework. The system achieves nearly 95% failure detection accuracy and reduces human intervention rates by 23.3%, significantly improving policy robustness and adaptation efficiency.
View blog
SIME: Enhancing Policy Self-Improvement with Modal-level Exploration
02 May 2025

A modal-level exploration framework enables robotic policies to autonomously improve beyond initial human demonstrations through noise injection in the model's reasoning space, demonstrating enhanced performance on manipulation tasks while maintaining sample efficiency through selective data filtering and policy fine-tuning strategies.
View blog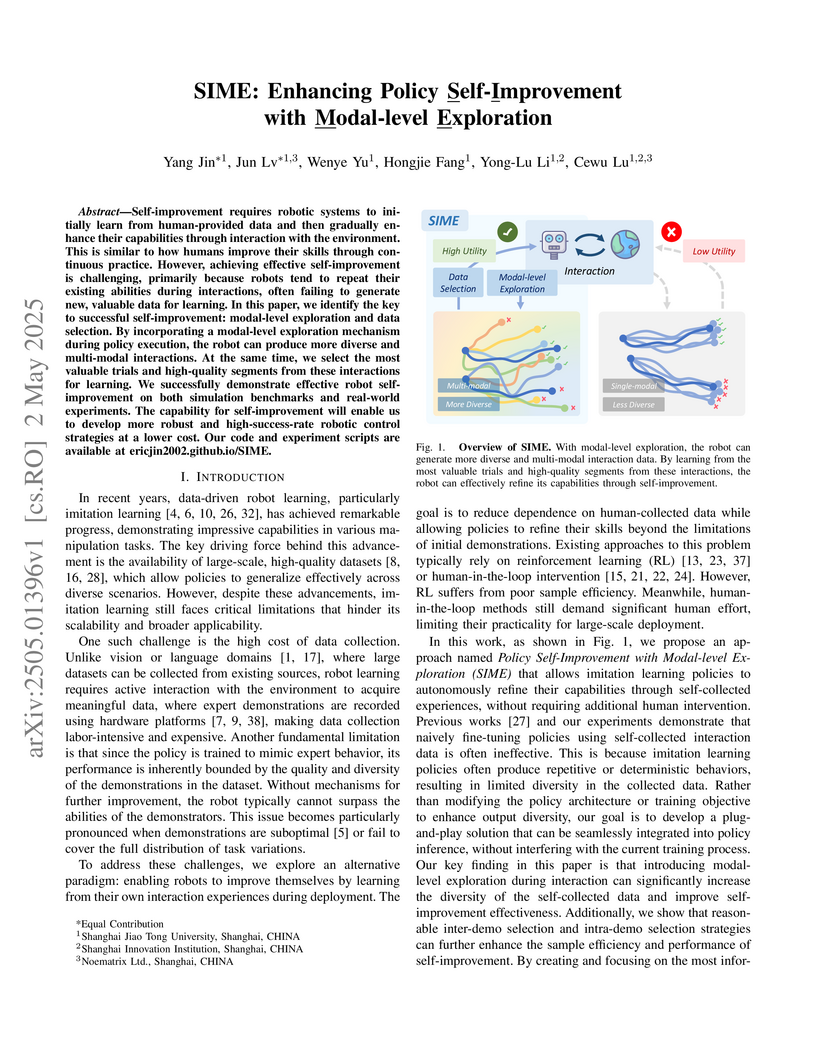
There are no more papers matching your filters at the moment.