
10 Dec 2025
We introduce a high-throughput platform that enables simultaneous, parallel testing of six bistable beams via programmable motion of a rotating disk. By prescribing harmonic angular dynamics, the platform explores the phase space of angular velocity and acceleration , producing continuously varying centrifugal and Euler force fields that act as tunable body forces in our specimens. Image processing extracts beam kinematics with sub-pixel accuracy, enabling precise identification of snap-through events. By testing six beams in parallel, the platform allows systematic variation of beam thickness, pre-compression, tilt angle, and clamp orientations across 65 distinct configurations, generating 23,400 individual experiments. We construct stability boundaries and quantitatively parameterize them as parabolic functions, characterized by a vertical offset and a curvature parameter. Tilt angle provides the most robust mechanism for tuning the curvature parameter, while beam thickness and pre-compression modulate vertical offset. Modal decomposition analysis reveals that antisymmetric clamp configurations can trigger mode switching, in which competing geometric and inertial effects drive transitions through different deformation pathways. Our work establishes a scalable experimental framework for high-throughput characterization of dynamic nonlinear instabilities in mechanics. The complete experimental dataset is made publicly available to support data-driven design and machine learning models for nonlinear mechanics with applications to bistability-based metamaterials, mechanical memory, and electronics-free sensing systems.

24 Nov 2025
Jerrold Franklin's paper challenges the long-held concept of infinite self-energy for a classical point charge, asserting that a rigorous classical treatment demonstrates the absence of any electromagnetic self-energy for such entities. The work identifies flaws in standard textbook derivations, concluding that the perceived infinity is an artifact of misapplied mathematical tools rather than an inherent property.

02 Apr 2025

Peking University researchers develop AI-Newton, a concept-driven framework that autonomously discovers physical laws from experimental data without prior knowledge, successfully rediscovering fundamental laws of Newtonian mechanics while identifying approximately 90 physical concepts and 50 general laws through an iterative knowledge building process.
16 Sep 2024
This is an introduction to calculus, and its applications to basic questions from physics. We first discuss the theory of functions , with the notion of continuity, and the construction of the derivative and of the integral . Then we investigate the case of the complex functions , and notably the holomorphic functions, and harmonic functions. Then, we discuss the multivariable functions, or or , with general theory, integration results, maximization questions, and basic applications to physics.
06 Oct 2025
Oleg D. Jefimenko's electrodynamics textbook is unique in its approaches to deriving the electric and magnetic fields of arbitrary charge and current distributions and of an arbitrarily moving point charge. However, an uncommon form of the inhomogeneous wave equation often poses difficulties for readers right from the beginning. In this paper, we substitute in a commonly used form, making his approaches readily accessible.
14 Oct 2022

A study from MIT researchers characterizes grokking, the delayed generalization phenomenon in neural networks, as the emergence of structured input embeddings. An effective theory predicts generalization dynamics and a critical training data size, showing that targeted regularization can accelerate or eliminate grokking even on datasets like MNIST.
22 Aug 2021
This paper explores the problem of analytically approximating the orbital state for a subset of orbits in a rotating potential with oblateness and ellipticity perturbations. This is done by isolating approximate differential equations for the orbit radius and other elements. The conservation of the Jacobi integral is used to make the problem solvable to first-order in the perturbations. The solutions are characterized as small deviations from an unperturbed circular orbit. The approximations are developed for near-circular orbits with initial mean motion around a body with rotation rate . The approximations are shown to be valid for values of angular rate ratio , with accuracy decreasing as , and singularities at and near . Extensions of the methodology to eccentric orbits are discussed, with commentary on the challenges of obtaining generally valid solutions for both near-circular and eccentric orbits.

07 Jul 2009
In this paper we present the time-dependent generalization of an 'ordinary'
autonomous human musculo-skeletal biomechanics. We start with the configuration
manifold of human body, given as a set of its all active degrees of freedom
(DOF). This is a Riemannian manifold with a material metric tensor given by the
total mass-inertia matrix of the human body segments. This is the base manifold
for standard autonomous biomechanics. To make its time-dependent
generalization, we need to extend it with a real time axis. On this extended
configuration space we develop time-dependent biomechanical Lagrangian
dynamics, using derived jet spaces of velocities and accelerations, as well as
the underlying geometric evolution of the mass-inertia matrix.
Keywords: Human time-dependent biomechanics, configuration manifold, jet
spaces, geometric evolution

05 Jul 2024

Viscoelasticity, when incorporated into the soft lubrication framework by researchers at Univ. Bordeaux and the University of Oslo, acts as a singular perturbation, introducing higher-order differential terms and enabling an unexpected enhancement of hydrodynamic lift forces. This extended model offers a more realistic description of object interactions with soft, deformable materials.

29 Jul 2024

Geometric phase has historically been defined using closed cycles of
polarization states, often derived using differential geometry on the Poincare
sphere. Using the recently-developed wave model of geometric phase, we show
that it is better to define geometric phase more generally, allowing every
polarized wave to have a well-defined value at any point in its path. Using
several example systems, we show how this approach provides more insight into
the wave's behavior. Moreover, by tracking the continuous evolution of
geometric phase as a wave propagates through an optical system, we encounter a
natural explanation of why the conventional Poincare sphere solid angle method
uses geodesic paths rather than physical paths of the polarization state.
19 May 2024
This paper presents an optimal synthesis of material distributions in obstacles for maximal extinction, scattering, or absorption. The material synthesis is based on an explicit construction utilizing the current distribution derived from physical bounds excited from the far-field. The bounds are expressed in radiation modes for materials restricted by their resistivity and characteristic modes for materials restricted by the contrast. The results are valid for arbitrary shapes, and analytical expressions are provided for spherical shapes.

29 Jun 2022
The manipulation of acoustic waves plays an important role in a wide range of
applications. Currently, acoustic wave manipulation typically relies on either
acoustic metasurfaces or phased array transducers. The elements of metasurfaces
are designed and optimized for a target frequency, which thus limits their
bandwidth. Phased array transducers, suffering from high-cost and complex
control circuits, are usually limited by the array size and the filling ratio
of the control units. In this work, we introduce active coding piezoelectric
metasurfaces; demonstrate commonly implemented acoustic wave manipulation
functionalities such as beam steering, beam focusing and vortex beam focusing,
acoustic tweezers; and eventually realize ultrasound imaging. The information
coded on the piezoelectric metasurfaces herein is frequency independent and
originates from the polarization directions, pointing either up or down, of the
piezoelectric materials. Such a piezoelectric metasurface is driven by a single
electrode and acts as a controllable active sound source, which combines the
advantages of acoustic metasurfaces and phased array transducers while keeping
the devices structurally simple and compact. Our coding piezoelectric
metasurfaces can lead to potential technological innovations in underwater
acoustic wave modulation, acoustic tweezers, biomedical imaging, industrial
non-destructive testing and neural regulation.

29 Dec 2023
Seismic faults release the stress accumulated during tectonic movement through rapid ruptures or slow slip events. The slow slip events play a crucial role in the seismic cycle as they impact the occurrence of earthquakes. However, the mechanisms by which a slow-slip region affects the dynamics of frictionally locked regions remain elusive. Here, building on model laboratory experiments, we establish that a slow-slip region acts as a nucleation center for seismic rupture, thereby enhancing earthquakes' frequency. We emulate slow-slip regions by introducing a granular material patch along part of a laboratory fault. By measuring the response of the fault to shear, we show that the role of the heterogeneity is to serve as a seed crack for rapid ruptures, reducing fault shear resistance. Additionally, by varying the external normal load, we show that the slow-slip region extends beyond the heterogeneity, demonstrating that fault composition is not the only requirement for slow-slip, but that load also plays a role. Our findings demonstrate that fracture concepts single out the very origin of earthquake nucleation and slip dynamics in seismic faults. The interplay between slowly-slipping and locked regions that we identify provides a promising avenue to monitor fault propagation and mitigate seismic hazards.
02 Jul 2020
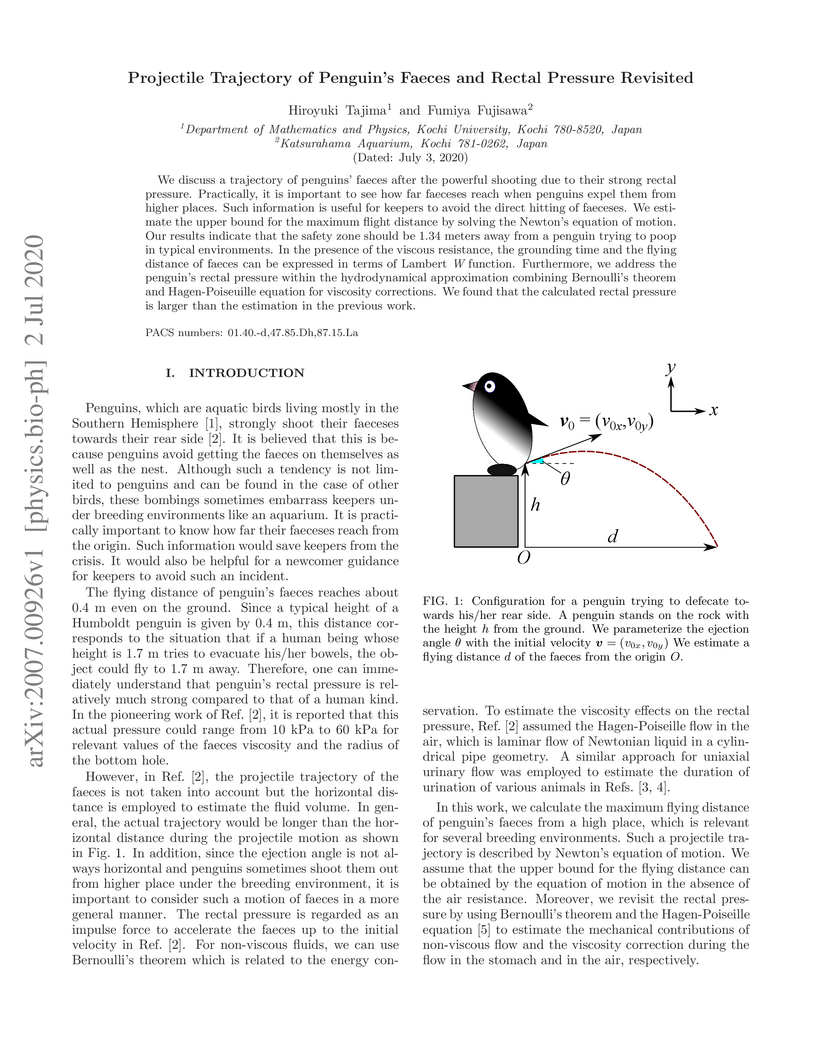
We discuss a trajectory of penguins' faeces after the powerful shooting due
to their strong rectal pressure. Practically, it is important to see how far
faeceses reach when penguins expel them from higher places. Such information is
useful for keepers to avoid the direct hitting of faeceses. We estimate the
upper bound for the maximum flight distance by solving the Newton's equation of
motion. Our results indicate that the safety zone should be 1.34 meters away
from a penguin trying to poop in typical environments. In the presence of the
viscous resistance, the grounding time and the flying distance of faeces can be
expressed in terms of Lambert {\it W} function. Furthermore, we address the
penguin's rectal pressure within the hydrodynamical approximation combining
Bernoulli's theorem and Hagen-Poiseuille equation for viscosity corrections. We
found that the calculated rectal pressure is larger than the estimation in the
previous work.

21 Jun 2020
Measurement theory in classical mechanics is investigated in the formulation
of classical mechanics by Koopman and von Neumann (KvN), using Hilbert space.
It is shown that the classical and the quantum measurements give different
"relative interpretations" of the measurement state and the recording state of
the measurement device. The uncertainty relation in classical mechanics is also
derived.

21 Jul 2025
Mark Titleman re-interprets E.T. Whittaker's classical potential theory to propose a dual framework where electromagnetism and gravity arise from orthogonal longitudinal wave potentials. This theory aims to explain cosmic expansion without dark energy, galactic rotation curves without dark matter by providing a theoretical basis for MOND, and eliminate physical singularities.
17 Oct 2018

Traditionally one defines the speed of a wave as a property of the medium. Recent studies in photonics have challenged this idea, indicating that spatial shaping of the optical wavefront has can alter the arrival time of single photons when compared to an entangled reference photon. However, relying only on time of flight measurements leads to ambiguity in the measurement. Unlike photonics, one can directly measure the phase and intensity of sound, permitting unambiguous measurements. We developed a bespoke 28-element ultrasonic phased array transducer to generate short pulses that carrying orbital angular momentum. Through spatial mapping, we observed pulse modulation that indicates a localised change in phase velocity by over 10 m/s. We present a geometrical argument for this effect, proposing that the phase velocity varies to compensate for the effective path length increase arising from spatial wavefront shaping. We expect that this pulse dispersion is a general effect for any spatially shaped wavefront and that it could be utilised to manipulate readings from pulse based sensor technologies such as SONAR, medical ultrasound, and underwater communication systems.
20 Sep 2014
The Lorentz force law of classical electrodynamics requires the introduction of hidden energy and hidden momentum in situations where an electric field acts on a magnetic material. In contrast, the Einstein-Laub formulation does not invoke hidden entities. The total force and torque exerted by electromagnetic fields on a given object are independent of whether the force and torque densities are evaluated using the law of Lorentz or that of Einstein and Laub. Hidden entities aside, the two formulations differ only in their predicted force and torque distributions throughout material media.

26 Mar 2021

The looping pendulum is a simple physical system consisting of two masses connected by a string that passes over a rod. We derive equations of motion for the looping pendulum using Newtonian mechanics, and show that these equations can be solved numerically to give a good description of the system's dynamics. The numerical solution captures complex aspects of the looping pendulum's behavior, and is in good agreement with the experimental results.

26 Jun 2019

The visualisation of objects moving at relativistic speeds has been a popular topic of study since Special Relativity's inception. While the standard exposition of the theory describes certain shape-changing effects, such as the Lorentz-contraction, it makes no mention of how an extended object would appear in a snapshot or how apparent distortions could be used for measurement. Previous work on the subject has derived the apparent form of an object, often making mention of George Gamow's relativistic cyclist thought experiment. Here, a rigorous re-analysis of the cyclist, this time in 3-dimensions, is undertaken for a binocular observer, accounting for both the distortion in apparent position and the relativistic colour and intensity shifts undergone by a fast moving object. A methodology for analysing binocular relativistic data is then introduced, allowing the fitting of experimental readings of an object's apparent position to determine the distance to the object and its velocity. This method is then applied to the simulation of Gamow's cyclist, producing self-consistent results.
There are no more papers matching your filters at the moment.
