23 Feb 2018
The Simultaneous Localization And Mapping (SLAM) problem has been well
studied in the robotics community, especially using mono, stereo cameras or
depth sensors. 3D depth sensors, such as Velodyne LiDAR, have proved in the
last 10 years to be very useful to perceive the environment in autonomous
driving, but few methods exist that directly use these 3D data for odometry. We
present a new low-drift SLAM algorithm based only on 3D LiDAR data. Our method
relies on a scan-to-model matching framework. We first have a specific sampling
strategy based on the LiDAR scans. We then define our model as the previous
localized LiDAR sweeps and use the Implicit Moving Least Squares (IMLS) surface
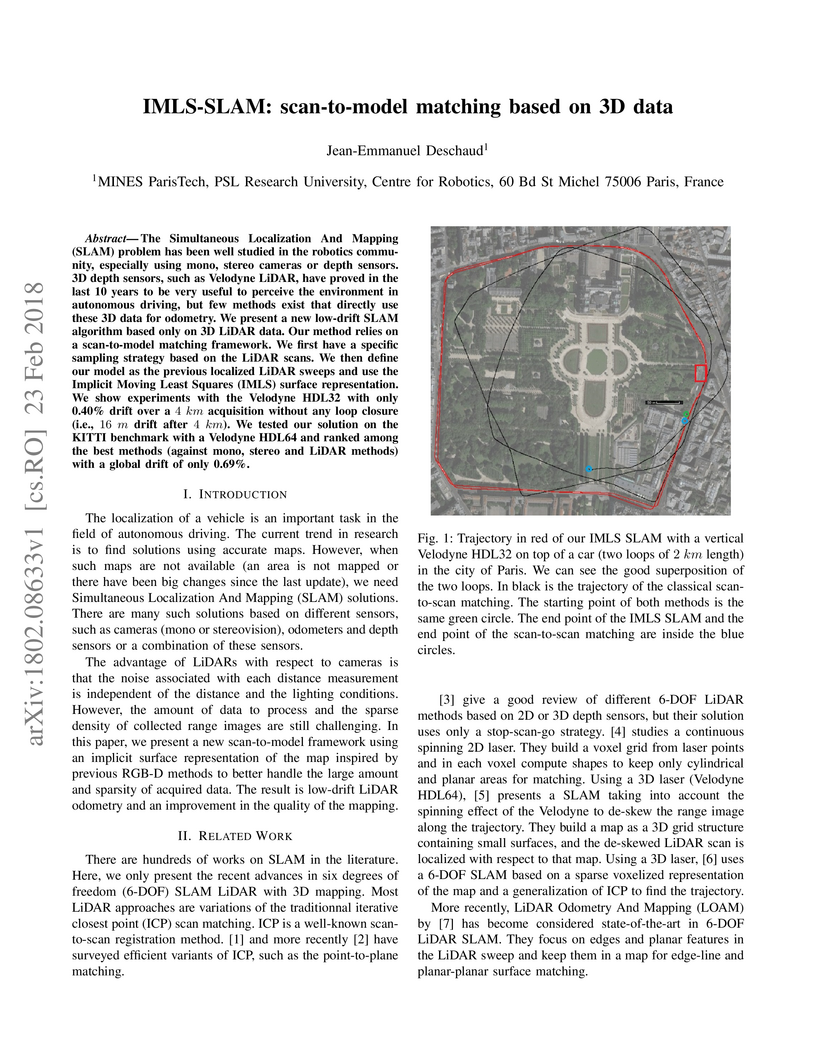
representation. We show experiments with the Velodyne HDL32 with only 0.40%
drift over a 4 km acquisition without any loop closure (i.e., 16 m drift after
4 km). We tested our solution on the KITTI benchmark with a Velodyne HDL64 and
ranked among the best methods (against mono, stereo and LiDAR methods) with a
global drift of only 0.69%.
21 Mar 2023
Transfer learning is a proven technique in 2D computer vision to leverage the
large amount of data available and achieve high performance with datasets
limited in size due to the cost of acquisition or annotation. In 3D, annotation
is known to be a costly task; nevertheless, pre-training methods have only
recently been investigated. Due to this cost, unsupervised pre-training has
been heavily favored. In this work, we tackle the case of real-time 3D semantic
segmentation of sparse autonomous driving LiDAR scans. Such datasets have been
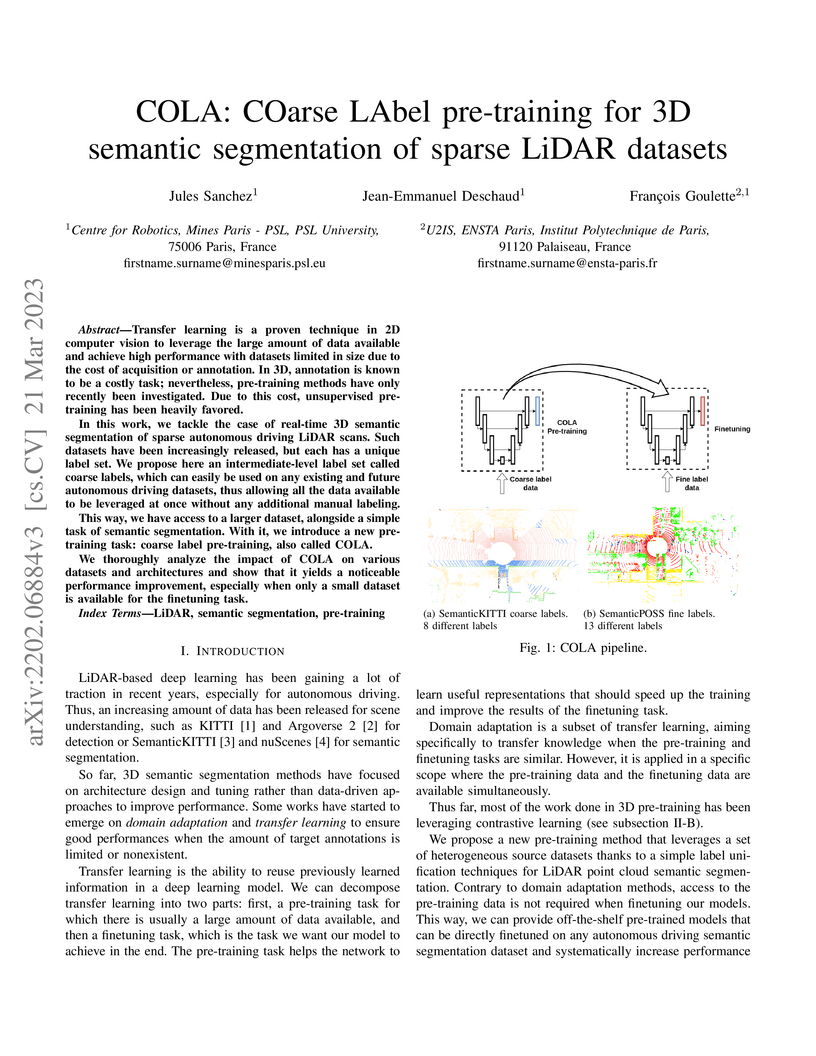
increasingly released, but each has a unique label set. We propose here an
intermediate-level label set called coarse labels, which can easily be used on
any existing and future autonomous driving datasets, thus allowing all the data
available to be leveraged at once without any additional manual labeling. This
way, we have access to a larger dataset, alongside a simple task of semantic
segmentation. With it, we introduce a new pre-training task: coarse label
pre-training, also called COLA. We thoroughly analyze the impact of COLA on
various datasets and architectures and show that it yields a noticeable
performance improvement, especially when only a small dataset is available for
the finetuning task.

07 Jun 2021
This paper develops probabilistic PV forecasters by taking advantage of recent breakthroughs in deep learning. It tailored forecasting tool, named encoder-decoder, is implemented to compute intraday multi-output PV quantiles forecasts to efficiently capture the time correlation. The models are trained using quantile regression, a non-parametric approach that assumes no prior knowledge of the probabilistic forecasting distribution. The case study is composed of PV production monitored on-site at the University of Liège (ULiège), Belgium. The weather forecasts from the regional climate model provided by the Laboratory of Climatology are used as inputs of the deep learning models. The forecast quality is quantitatively assessed by the continuous ranked probability and interval scores. The results indicate this architecture improves the forecast quality and is computationally efficient to be incorporated in an intraday decision-making tool for robust optimization.
There are no more papers matching your filters at the moment.
