08 Dec 2024

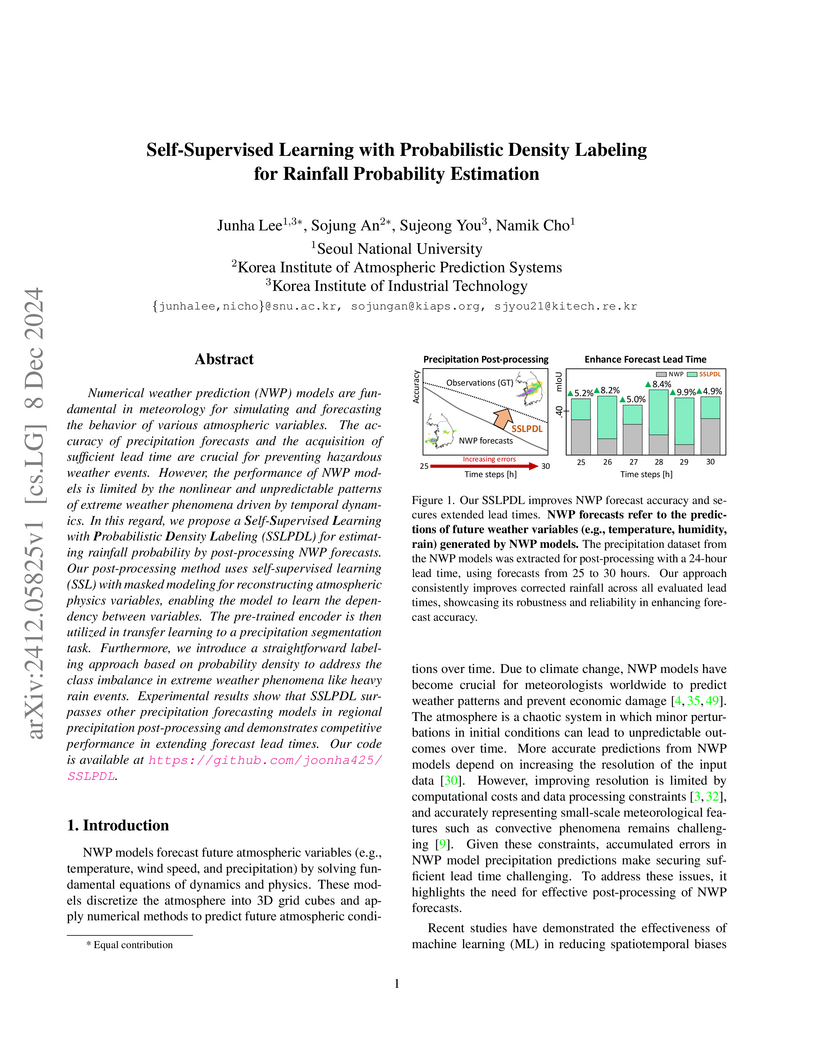
Numerical weather prediction (NWP) models are fundamental in meteorology for simulating and forecasting the behavior of various atmospheric variables. The accuracy of precipitation forecasts and the acquisition of sufficient lead time are crucial for preventing hazardous weather events. However, the performance of NWP models is limited by the nonlinear and unpredictable patterns of extreme weather phenomena driven by temporal dynamics. In this regard, we propose a \textbf{S}elf-\textbf{S}upervised \textbf{L}earning with \textbf{P}robabilistic \textbf{D}ensity \textbf{L}abeling (SSLPDL) for estimating rainfall probability by post-processing NWP forecasts. Our post-processing method uses self-supervised learning (SSL) with masked modeling for reconstructing atmospheric physics variables, enabling the model to learn the dependency between variables. The pre-trained encoder is then utilized in transfer learning to a precipitation segmentation task. Furthermore, we introduce a straightforward labeling approach based on probability density to address the class imbalance in extreme weather phenomena like heavy rain events. Experimental results show that SSLPDL surpasses other precipitation forecasting models in regional precipitation post-processing and demonstrates competitive performance in extending forecast lead times. Our code is available at this https URL

30 May 2025
Robotic manipulators are essential for precise industrial pick-and-place
operations, yet planning collision-free trajectories in dynamic environments
remains challenging due to uncertainties such as sensor noise and time-varying
delays. Conventional control methods often fail under these conditions,
motivating the development of Robust MPC (RMPC) strategies with constraint
tightening. In this paper, we propose a novel RMPC framework that integrates
phase-based nominal control with a robust safety mode, allowing smooth
transitions between safe and nominal operations. Our approach dynamically
adjusts constraints based on real-time predictions of moving
obstacles\textemdash whether human, robot, or other dynamic objects\textemdash
thus ensuring continuous, collision-free operation. Simulation studies
demonstrate that our controller improves both motion naturalness and safety,
achieving faster task completion than conventional methods.
09 Mar 2022
The inverse approach is computationally efficient in aerodynamic design as
the desired target performance distribution is prespecified. However, it has
some significant limitations that prevent it from achieving full efficiency.
First, the iterative procedure should be repeated whenever the specified target
distribution changes. Target distribution optimization can be performed to
clarify the ambiguity in specifying this distribution, but several additional
problems arise in this process such as loss of the representation capacity due
to parameterization of the distribution, excessive constraints for a realistic
distribution, inaccuracy of quantities of interest due to theoretical/empirical
predictions, and the impossibility of explicitly imposing geometric
constraints. To deal with these issues, a novel inverse design optimization
framework with a two-step deep learning approach is proposed. A variational
autoencoder and multi-layer perceptron are used to generate a realistic target
distribution and predict the quantities of interest and shape parameters from
the generated distribution, respectively. Then, target distribution
optimization is performed as the inverse design optimization. The proposed
framework applies active learning and transfer learning techniques to improve
accuracy and efficiency. Finally, the framework is validated through
aerodynamic shape optimizations of the wind turbine airfoil. Their results show
that this framework is accurate, efficient, and flexible to be applied to other
inverse design engineering applications.
12 Aug 2024
Ventilated acoustic resonator(VAR), a type of acoustic metamaterial, emerge
as an alternative for sound attenuation in environments that require
ventilation, owing to its excellent low-frequency attenuation performance and
flexible shape adaptability. However, due to the non-linear acoustic responses
of VARs, the VAR designs are generally obtained within a limited parametrized
design space, and the design relies on the iteration of the numerical
simulation which consumes a considerable amount of computational time and
resources. This paper proposes an acoustic response-encoded variational
autoencoder (AR-VAE), a novel variational autoencoder-based generative design
model for the efficient and accurate inverse design of VAR even with
non-parametrized designs. The AR-VAE matches the high-dimensional acoustic
response with the VAR cross-section image in the dimension-reduced latent
space, which enables the AR-VAE to generate various non-parametrized VAR
cross-section images with the target acoustic response. AR-VAE generates
non-parameterized VARs from target acoustic responses, which show a 25-fold
reduction in mean squared error compared to conventional deep learning-based
parameter searching methods while exhibiting lower average mean squared error
and peak frequency variance. By combining the inverse-designed VARs by AR-VAE,
multi-cavity VAR was devised for broadband and multitarget peak frequency
attenuation. The proposed design method presents a new approach for structural
inverse-design with a high-dimensional non-linear physical response.
21 Jan 2014
This paper proposed software architecture for operating an automatic semiconductor manufacturing machine. Recent machines for semiconductor process are required for high level of automation which are composed of motion control, machine vision, data acquisition and networking. These functions are executed through industrial equipments that are generally installed in a computer. The equipments occupy a great part of system resource and generate a lot of computation, so the software structure should be designed for efficiency. The proposed architecture is consisted of four layers and virtual equipments(VEs). The VEs are made by subclassing the physical equipments(PEs) and the layers are coded into thread which updates the status of VEs. Subroutines in a program refer to the pointer of VEs, and direct access to physical equipment are prohibited. The number of access (NOA) to PEs in typical industrial application was simulated for the unlimited access structure and the presented structure. The result showed that the proposed structure was more efficient than typical ones and irrespective of subroutines. This architecture was also applied to design a machine operating software and performed automatic wafer dicing.
There are no more papers matching your filters at the moment.
