
03 May 2024

A hierarchical reinforcement learning framework enables a wheeled-legged robot to autonomously navigate diverse urban environments by integrating high-level navigation with low-level locomotion control, achieving an average speed of 1.68 m/s and a 6.5x speed improvement over purely legged systems.

22 Nov 2024




Authored by researchers from institutions including Georgia Tech, Google DeepMind, and TUM, this review paper synthesizes recent advancements in learning-based legged locomotion, mapping the evolution of hardware, simulation, and algorithms while detailing critical strategies for sim-to-real transfer and hybrid control-learning approaches. It provides a comprehensive overview of how these methods enable dynamic and agile robot behaviors across quadrupedal and bipedal systems.
28 Sep 2024

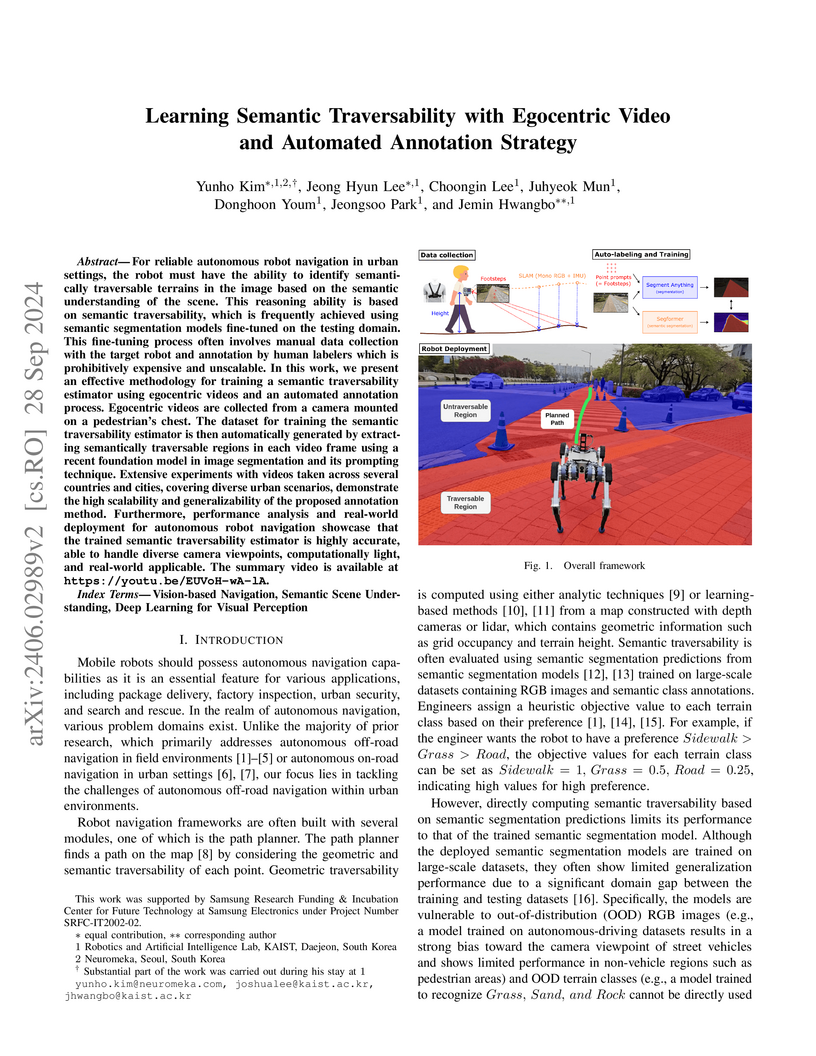
For reliable autonomous robot navigation in urban settings, the robot must have the ability to identify semantically traversable terrains in the image based on the semantic understanding of the scene. This reasoning ability is based on semantic traversability, which is frequently achieved using semantic segmentation models fine-tuned on the testing domain. This fine-tuning process often involves manual data collection with the target robot and annotation by human labelers which is prohibitively expensive and unscalable. In this work, we present an effective methodology for training a semantic traversability estimator using egocentric videos and an automated annotation process. Egocentric videos are collected from a camera mounted on a pedestrian's chest. The dataset for training the semantic traversability estimator is then automatically generated by extracting semantically traversable regions in each video frame using a recent foundation model in image segmentation and its prompting technique. Extensive experiments with videos taken across several countries and cities, covering diverse urban scenarios, demonstrate the high scalability and generalizability of the proposed annotation method. Furthermore, performance analysis and real-world deployment for autonomous robot navigation showcase that the trained semantic traversability estimator is highly accurate, able to handle diverse camera viewpoints, computationally light, and real-world applicable. The summary video is available at this https URL.

03 May 2024
Autonomous wheeled-legged robots have the potential to transform logistics systems, improving operational efficiency and adaptability in urban environments. Navigating urban environments, however, poses unique challenges for robots, necessitating innovative solutions for locomotion and navigation. These challenges include the need for adaptive locomotion across varied terrains and the ability to navigate efficiently around complex dynamic obstacles. This work introduces a fully integrated system comprising adaptive locomotion control, mobility-aware local navigation planning, and large-scale path planning within the city. Using model-free reinforcement learning (RL) techniques and privileged learning, we develop a versatile locomotion controller. This controller achieves efficient and robust locomotion over various rough terrains, facilitated by smooth transitions between walking and driving modes. It is tightly integrated with a learned navigation controller through a hierarchical RL framework, enabling effective navigation through challenging terrain and various obstacles at high speed. Our controllers are integrated into a large-scale urban navigation system and validated by autonomous, kilometer-scale navigation missions conducted in Zurich, Switzerland, and Seville, Spain. These missions demonstrate the system's robustness and adaptability, underscoring the importance of integrated control systems in achieving seamless navigation in complex environments. Our findings support the feasibility of wheeled-legged robots and hierarchical RL for autonomous navigation, with implications for last-mile delivery and beyond.
There are no more papers matching your filters at the moment.
