
07 Dec 2025
The Khalasi framework implements an end-to-end reinforcement learning pipeline, enabling autonomous surface vehicles (ASVs) to navigate energy-efficiently in complex, vortical flow fields using only local sensor data. This approach achieves a 43.37% energy saving over baselines and demonstrates robust generalization to unseen synthetic and real-world ocean currents.
08 Dec 2025
Research on promoting cooperation among autonomous, self-regarding agents has often focused on the bi-objective optimisation problem: minimising the total incentive cost while maximising the frequency of cooperation. However, the optimal value of social welfare under such constraints remains largely unexplored. In this work, we hypothesise that achieving maximal social welfare is not guaranteed at the minimal incentive cost required to drive agents to a desired cooperative state. To address this gap, we adopt to a single-objective approach focused on maximising social welfare, building upon foundational evolutionary game theory models that examined cost efficiency in finite populations, in both well-mixed and structured population settings. Our analytical model and agent-based simulations show how different interference strategies, including rewarding local versus global behavioural patterns, affect social welfare and dynamics of cooperation. Our results reveal a significant gap in the per-individual incentive cost between optimising for pure cost efficiency or cooperation frequency and optimising for maximal social welfare. Overall, our findings indicate that incentive design, policy, and benchmarking in multi-agent systems and human societies should prioritise welfare-centric objectives over proxy targets of cost or cooperation frequency.
09 Dec 2025
Biological systems exhibit remarkable morphogenetic plasticity, where a single genome can encode various specialized cellular structures triggered by local chemical signals. In the domain of Deep Learning, Differentiable Neural Cellular Automata (NCA) have emerged as a paradigm to mimic this self-organization. However, existing NCA research has predominantly focused on continuous texture synthesis or single-target object recovery, leaving the challenge of class-conditional structural generation largely unexplored. In this work, we propose a novel Conditional Neural Cellular Automata (c-NCA) architecture capable of growing distinct topological structures - specifically MNIST digits - from a single generic seed, guided solely by a spatially broadcasted class vector. Unlike traditional generative models (e.g., GANs, VAEs) that rely on global reception fields, our model enforces strict locality and translation equivariance. We demonstrate that by injecting a one-hot condition into the cellular perception field, a single set of local rules can learn to break symmetry and self-assemble into ten distinct geometric attractors. Experimental results show that our c-NCA achieves stable convergence, correctly forming digit topologies from a single pixel, and exhibits robustness characteristic of biological systems. This work bridges the gap between texture-based NCAs and structural pattern formation, offering a lightweight, biologically plausible alternative for conditional generation.

09 Dec 2025
Model-based planning in robotic domains is fundamentally challenged by the hybrid nature of physical dynamics, where continuous motion is punctuated by discrete events such as contacts and impacts. Conventional latent world models typically employ monolithic neural networks that enforce global continuity, inevitably over-smoothing the distinct dynamic modes (e.g., sticking vs. sliding, flight vs. stance). For a planner, this smoothing results in catastrophic compounding errors during long-horizon lookaheads, rendering the search process unreliable at physical boundaries. To address this, we introduce the Prismatic World Model (PRISM-WM), a structured architecture designed to decompose complex hybrid dynamics into composable primitives. PRISM-WM leverages a context-aware Mixture-of-Experts (MoE) framework where a gating mechanism implicitly identifies the current physical mode, and specialized experts predict the associated transition dynamics. We further introduce a latent orthogonalization objective to ensure expert diversity, effectively preventing mode collapse. By accurately modeling the sharp mode transitions in system dynamics, PRISM-WM significantly reduces rollout drift. Extensive experiments on challenging continuous control benchmarks, including high-dimensional humanoids and diverse multi-task settings, demonstrate that PRISM-WM provides a superior high-fidelity substrate for trajectory optimization algorithms (e.g., TD-MPC), proving its potential as a powerful foundational model for next-generation model-based agents.
08 Dec 2025

The escalating sophistication and variety of cyber threats have rendered static honeypots inadequate, necessitating adaptive, intelligence-driven deception. In this work, ADLAH is introduced: an Adaptive Deep Learning Anomaly Detection Honeynet designed to maximize high-fidelity threat intelligence while minimizing cost through autonomous orchestration of infrastructure. The principal contribution is offered as an end-to-end architectural blueprint and vision for an AI-driven deception platform. Feasibility is evidenced by a functional prototype of the central decision mechanism, in which a reinforcement learning (RL) agent determines, in real time, when sessions should be escalated from low-interaction sensor nodes to dynamically provisioned, high-interaction honeypots. Because sufficient live data were unavailable, field-scale validation is not claimed; instead, design trade-offs and limitations are detailed, and a rigorous roadmap toward empirical evaluation at scale is provided. Beyond selective escalation and anomaly detection, the architecture pursues automated extraction, clustering, and versioning of bot attack chains, a core capability motivated by the empirical observation that exposed services are dominated by automated traffic. Together, these elements delineate a practical path toward cost-efficient capture of high-value adversary behavior, systematic bot versioning, and the production of actionable threat intelligence.
04 Dec 2025
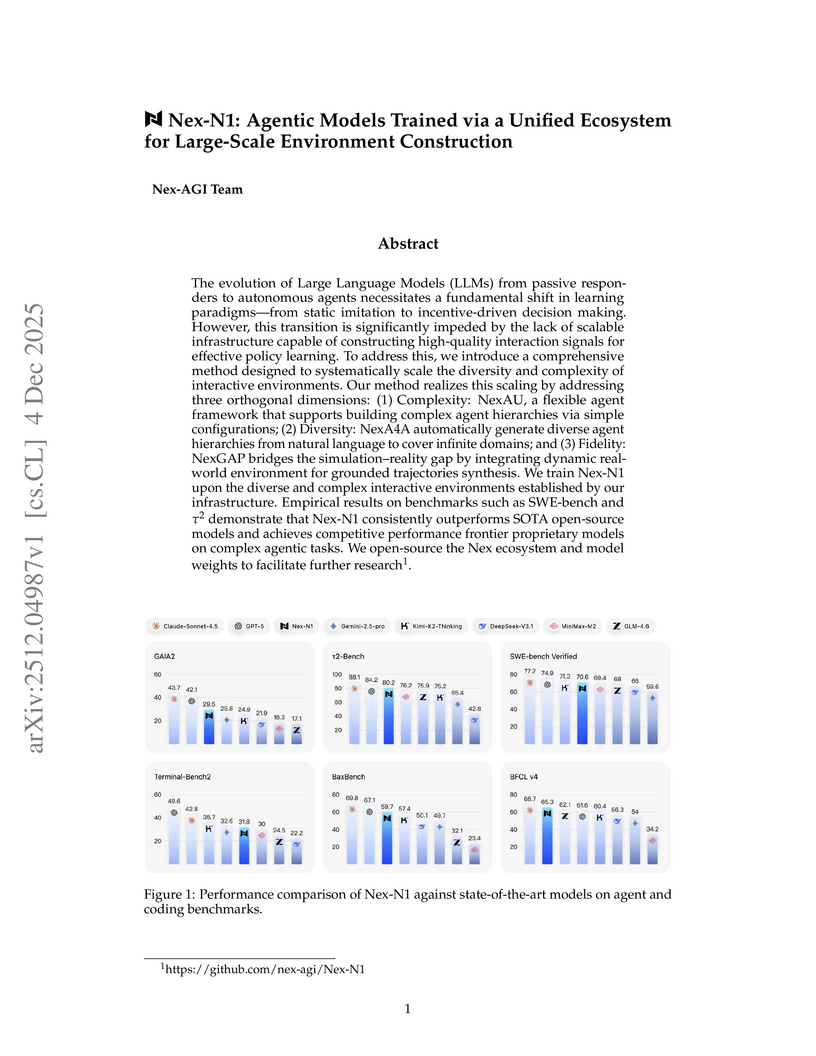
The Nex-AGI Team developed a unified ecosystem, Nex, for constructing large-scale, diverse, and realistically grounded interactive environments to train autonomous AI agents. Their Nex-N1 models, trained using this infrastructure, demonstrate competitive to superior performance on complex agentic tasks, including coding and deep research, across various benchmarks and real-world evaluations.
09 Dec 2025
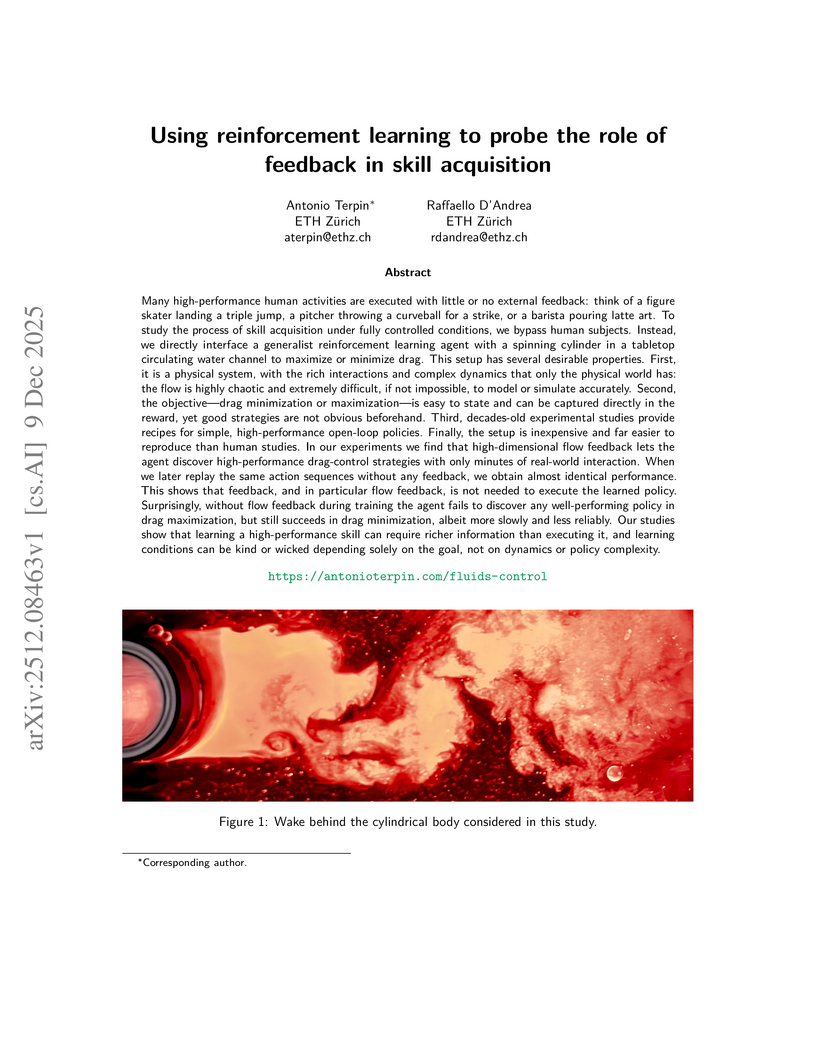
Many high-performance human activities are executed with little or no external feedback: think of a figure skater landing a triple jump, a pitcher throwing a curveball for a strike, or a barista pouring latte art. To study the process of skill acquisition under fully controlled conditions, we bypass human subjects. Instead, we directly interface a generalist reinforcement learning agent with a spinning cylinder in a tabletop circulating water channel to maximize or minimize drag. This setup has several desirable properties. First, it is a physical system, with the rich interactions and complex dynamics that only the physical world has: the flow is highly chaotic and extremely difficult, if not impossible, to model or simulate accurately. Second, the objective -- drag minimization or maximization -- is easy to state and can be captured directly in the reward, yet good strategies are not obvious beforehand. Third, decades-old experimental studies provide recipes for simple, high-performance open-loop policies. Finally, the setup is inexpensive and far easier to reproduce than human studies. In our experiments we find that high-dimensional flow feedback lets the agent discover high-performance drag-control strategies with only minutes of real-world interaction. When we later replay the same action sequences without any feedback, we obtain almost identical performance. This shows that feedback, and in particular flow feedback, is not needed to execute the learned policy. Surprisingly, without flow feedback during training the agent fails to discover any well-performing policy in drag maximization, but still succeeds in drag minimization, albeit more slowly and less reliably. Our studies show that learning a high-performance skill can require richer information than executing it, and learning conditions can be kind or wicked depending solely on the goal, not on dynamics or policy complexity.

06 Dec 2025


Researchers at ETH Zurich and the Chinese Academy of Sciences developed DeepSKA, a neural framework that provides interpretable and reliable estimation of expected outputs for Stochastic Reaction Networks (SRNs). This method combines spectral decomposition-based neural networks with hybrid Deep Learning/Monte Carlo estimators, achieving unbiased and provably convergent results while reducing variance up to 10,000-fold compared to standard simulations.

08 Dec 2025
Multi-agent role-playing has recently shown promise for studying social behavior with language agents, but existing simulations are mostly monolingual and fail to model cross-lingual interaction, an essential property of real societies. We introduce MASim, the first multilingual agent-based simulation framework that supports multi-turn interaction among generative agents with diverse sociolinguistic profiles. MASim offers two key analyses: (i) global public opinion modeling, by simulating how attitudes toward open-domain hypotheses evolve across languages and cultures, and (ii) media influence and information diffusion, via autonomous news agents that dynamically generate content and shape user behavior. To instantiate simulations, we construct the MAPS benchmark, which combines survey questions and demographic personas drawn from global population distributions. Experiments on calibration, sensitivity, consistency, and cultural case studies show that MASim reproduces sociocultural phenomena and highlights the importance of multilingual simulation for scalable, controlled computational social science.
09 Dec 2025
In this paper, we examine the convergence landscape of multi-agent learning under uncertainty. Specifically, we analyze two stochastic models of regularized learning in continuous games -- one in continuous and one in discrete time with the aim of characterizing the long-run behavior of the induced sequence of play. In stark contrast to deterministic, full-information models of learning (or models with a vanishing learning rate), we show that the resulting dynamics do not converge in general. In lieu of this, we ask instead which actions are played more often in the long run, and by how much. We show that, in strongly monotone games, the dynamics of regularized learning may wander away from equilibrium infinitely often, but they always return to its vicinity in finite time (which we estimate), and their long-run distribution is sharply concentrated around a neighborhood thereof. We quantify the degree of this concentration, and we show that these favorable properties may all break down if the underlying game is not strongly monotone -- underscoring in this way the limits of regularized learning in the presence of persistent randomness and uncertainty.

08 Dec 2025
Embodied agents, such as robots and virtual characters, must continuously select actions to execute tasks effectively, solving complex sequential decision-making problems. Given the difficulty of designing such controllers manually, learning-based approaches have emerged as promising alternatives, most notably Deep Reinforcement Learning (DRL) and Deep Imitation Learning (DIL). DRL leverages reward signals to optimize behavior, while DIL uses expert demonstrations to guide learning. This document introduces DRL and DIL in the context of embodied agents, adopting a concise, depth-first approach to the literature. It is self-contained, presenting all necessary mathematical and machine learning concepts as they are needed. It is not intended as a survey of the field; rather, it focuses on a small set of foundational algorithms and techniques, prioritizing in-depth understanding over broad coverage. The material ranges from Markov Decision Processes to REINFORCE and Proximal Policy Optimization (PPO) for DRL, and from Behavioral Cloning to Dataset Aggregation (DAgger) and Generative Adversarial Imitation Learning (GAIL) for DIL.

05 Dec 2025
Average-reward reinforcement learning in semi-Markov decision processes via relative value iteration
Average-reward reinforcement learning in semi-Markov decision processes via relative value iteration
This paper applies the authors' recent results on asynchronous stochastic approximation (SA) in the Borkar-Meyn framework to reinforcement learning in average-reward semi-Markov decision processes (SMDPs). We establish the convergence of an asynchronous SA analogue of Schweitzer's classical relative value iteration algorithm, RVI Q-learning, for finite-space, weakly communicating SMDPs. In particular, we show that the algorithm converges almost surely to a compact, connected subset of solutions to the average-reward optimality equation, with convergence to a unique, sample path-dependent solution under additional stepsize and asynchrony conditions. Moreover, to make full use of the SA framework, we introduce new monotonicity conditions for estimating the optimal reward rate in RVI Q-learning. These conditions substantially expand the previously considered algorithmic framework and are addressed through novel arguments in the stability and convergence analysis of RVI Q-learning.

08 Dec 2025
Heart failure (HF) is one of the leading causes of rehospitalization among older adults in the United States. Although clinical notes contain rich, detailed patient information and make up a large portion of electronic health records (EHRs), they remain underutilized for HF readmission risk analysis. Traditional computational models for HF readmission often rely on expert-crafted rules, medical thesauri, and ontologies to interpret clinical notes, which are typically written under time pressure and may contain misspellings, abbreviations, and domain-specific jargon. We present ClinNoteAgents, an LLM-based multi-agent framework that transforms free-text clinical notes into (1) structured representations of clinical and social risk factors for association analysis and (2) clinician-style abstractions for HF 30-day readmission prediction. We evaluate ClinNoteAgents on 3,544 notes from 2,065 patients (readmission rate=35.16%), demonstrating strong performance in extracting risk factors from free-text, identifying key contributing factors, and predicting readmission risk. By reducing reliance on structured fields and minimizing manual annotation and model training, ClinNoteAgents provides a scalable and interpretable approach to note-based HF readmission risk modeling in data-limited healthcare systems.

05 Dec 2025
This paper develops the Theory of Strategic Evolution, a general model for systems in which the population of players, strategies, and institutional rules evolve together. The theory extends replicator dynamics to settings with endogenous players, multi level selection, innovation, constitutional change, and meta governance. The central mathematical object is a Poiesis stack: a hierarchy of strategic layers linked by cross level gain matrices. Under small gain conditions, the system admits a global Lyapunov function and satisfies selection, tracking, and stochastic stability results at every finite depth. We prove that the class is closed under block extension, innovation events, heterogeneous utilities, continuous strategy spaces, and constitutional evolution. The closure theorem shows that no new dynamics arise at higher levels and that unrestricted self modification cannot preserve Lyapunov structure. The theory unifies results from evolutionary game theory, institutional design, innovation dynamics, and constitutional political economy, providing a general mathematical model of long run strategic adaptation.
06 Dec 2025
Autonomous agents often require multiple strategies to solve complex tasks, but determining when to switch between strategies remains challenging. This research introduces a reinforcement learning technique to learn switching thresholds between two orthogonal navigation policies. Using maze navigation as a case study, this work demonstrates how an agent can dynamically transition between systematic exploration (coverage) and goal-directed pathfinding (convergence) to improve task performance. Unlike fixed-threshold approaches, the agent uses Q-learning to adapt switching behavior based on coverage percentage and distance to goal, requiring only minimal domain knowledge: maze dimensions and target location. The agent does not require prior knowledge of wall positions, optimal threshold values, or hand-crafted heuristics; instead, it discovers effective switching strategies dynamically during each run. The agent discretizes its state space into coverage and distance buckets, then adapts which coverage threshold (20-60\%) to apply based on observed progress signals. Experiments across 240 test configurations (4 maze sizes from 1616 to 128128 10 unique mazes 6 agent variants) demonstrate that adaptive threshold learning outperforms both single-strategy agents and fixed 40\% threshold baselines. Results show 23-55\% improvements in completion time, 83\% reduction in runtime variance, and 71\% improvement in worst-case scenarios. The learned switching behavior generalizes within each size class to unseen wall configurations. Performance gains scale with problem complexity: 23\% improvement for 1616 mazes, 34\% for 3232, and 55\% for 6464, demonstrating that as the space of possible maze structures grows, the value of adaptive policy selection over fixed heuristics increases proportionally.
09 Dec 2025
Workplace toxicity is widely recognized as detrimental to organizational culture, yet quantifying its direct impact on operational efficiency remains methodologically challenging due to the ethical and practical difficulties of reproducing conflict in human subjects. This study leverages Large Language Model (LLM) based Multi-Agent Systems to simulate 1-on-1 adversarial debates, creating a controlled "sociological sandbox". We employ a Monte Carlo method to simulate hundrets of discussions, measuring the convergence time (defined as the number of arguments required to reach a conclusion) between a baseline control group and treatment groups involving agents with "toxic" system prompts. Our results demonstrate a statistically significant increase of approximately 25\% in the duration of conversations involving toxic participants. We propose that this "latency of toxicity" serves as a proxy for financial damage in corporate and academic settings. Furthermore, we demonstrate that agent-based modeling provides a reproducible, ethical alternative to human-subject research for measuring the mechanics of social friction.

05 Dec 2025
The work from Aisot Technologies AG and ETH Zurich introduces Agent-Based-Model informed Neural Networks (ABM-NNs), which embed ABM principles like localized interactions and conservation laws into a Neural ODE framework. This approach yields models that offer superior generalization, robustness, and interpretability for complex, non-equilibrium socio-techno-economic systems, enabling gradient-based counterfactual analysis.
03 Dec 2025
This paper from the Knowledge Lab at the University of Chicago models how political elites might strategically shape public opinion when artificial intelligence significantly reduces the cost of persuasion. It finds that a single elite has incentives to polarize society for future policy flexibility, while competing elites create a nuanced dynamic between polarization and locking in public opinion to deter rivals, making the overall effect on polarization context-dependent.
25 Nov 2025
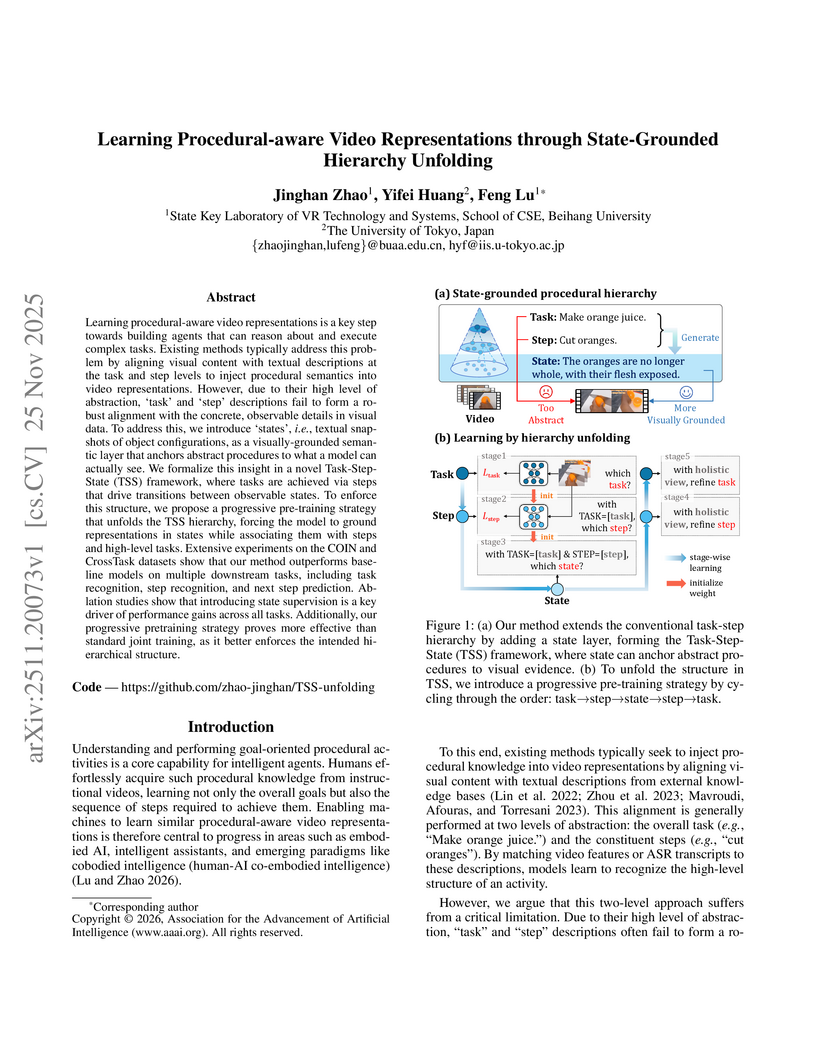
Researchers introduce a Task-Step-State (TSS) framework and a progressive pre-training strategy to learn video representations that are aware of procedural information. This method, which uses large language models to generate state descriptions and follows a U-shaped learning pathway, shows improved performance over existing methods in tasks such as step recognition and forecasting on procedural video datasets.

04 Dec 2025
Agent-based editing models have substantially advanced interactive experiences, processing quality, and creative flexibility. However, two critical challenges persist: (1) instruction hallucination, text-only chain-of-thought (CoT) reasoning cannot fully prevent factual errors due to inherent information bottlenecks; (2) reward hacking, dynamic policy optimization against static reward models allows agents to exploit flaws in reward functions. To address these issues, we propose JarvisEvo, a unified image editing agent that emulates an expert human designer by iteratively editing, selecting appropriate tools, evaluating results, and reflecting on its own decisions to refine outcomes. JarvisEvo offers three key advantages: (1) an interleaved multimodal chain-of-thought (iMCoT) reasoning mechanism that enhances instruction following and editing quality; (2) a synergistic editor-evaluator policy optimization (SEPO) framework that enables self-improvement without external rewards, effectively mitigating reward hacking; and (3) support for both global and local fine-grained editing through seamless integration of Adobe Lightroom. On ArtEdit-Bench, JarvisEvo outperforms Nano-Banana by an average of 18.95% on preservative editing metrics, including a substantial 44.96% improvement in pixel-level content fidelity. Project page: this https URL
There are no more papers matching your filters at the moment.
