
24 Oct 2022
 UC Berkeley
UC Berkeley Microsoft
Microsoft Columbia University
Columbia University Allen Institute for AINational Univ. of SingaporeTCS ResearchTehran PolytechnicUniv. of WashingtonStanford Univ.Factored AIArizona State Univ.Univ of AmsterdamSharif Univ. of Tech.PSG College of Tech.Indian Institute of Tech.Government Polytechnic CollegeZycus InfotechNational Institute of Tech. KarnatakaUniv. of Massachusetts, Amherst
Allen Institute for AINational Univ. of SingaporeTCS ResearchTehran PolytechnicUniv. of WashingtonStanford Univ.Factored AIArizona State Univ.Univ of AmsterdamSharif Univ. of Tech.PSG College of Tech.Indian Institute of Tech.Government Polytechnic CollegeZycus InfotechNational Institute of Tech. KarnatakaUniv. of Massachusetts, Amherst
Researchers at the Allen Institute for AI and the University of Washington created SUPER-NATURALINSTRUCTIONS, a public meta-dataset of 1,616 diverse NLP tasks, to advance instruction-following capabilities. Their Tk-INSTRUCT model, trained on this benchmark, outperformed the 175B-parameter InstructGPT by 9.9 ROUGE-L points on unseen English tasks and by 13.3 ROUGE-L points on unseen non-English tasks.

21 Jun 2018

The advent of RoCE (RDMA over Converged Ethernet) has led to a significant
increase in the use of RDMA in datacenter networks. To achieve good
performance, RoCE requires a lossless network which is in turn achieved by
enabling Priority Flow Control (PFC) within the network. However, PFC brings
with it a host of problems such as head-of-the-line blocking, congestion
spreading, and occasional deadlocks. Rather than seek to fix these issues, we
instead ask: is PFC fundamentally required to support RDMA over Ethernet?
We show that the need for PFC is an artifact of current RoCE NIC designs
rather than a fundamental requirement. We propose an improved RoCE NIC (IRN)
design that makes a few simple changes to the RoCE NIC for better handling of
packet losses. We show that IRN (without PFC) outperforms RoCE (with PFC) by
6-83% for typical network scenarios. Thus not only does IRN eliminate the need
for PFC, it improves performance in the process! We further show that the
changes that IRN introduces can be implemented with modest overheads of about
3-10% to NIC resources. Based on our results, we argue that research and
industry should rethink the current trajectory of network support for RDMA.

02 Apr 2025


NVIDIA Research and collaborators develop SLeRP, a system that enables robots to perform precise slot-level object placement by learning from a single human demonstration video, combining visual foundation models (SAM, DINOv2) with a specialized slot detection network to achieve accurate object placement across multiple real-world scenarios.

22 May 2007
Fermilab CERN
CERN Argonne National LaboratoryLudwig-Maximilians-Universität MünchenRWTH-AachenINFN, Sezione di PaviaINFN, Sezione di MilanoMax-Planck-Institut für PhysikCEA SaclayOxford Univ.Institute of Nuclear PhysicsInstitute for High Energy PhysicsUniv. of California, Los AngelesUniv. of ManchesterDuke Univ.Univ. of WashingtonMoscow State Univ.Univ. of PaviaUniv. of OklahomaSouthern Methodist Univ.Univ. of SouthamptonMichigan State Univ.JINR-DubnaUniv. of California, RiversideJagiellonian Univ.Univ. of RochesterState Univ. of New York, Stony BrookUniv. of MilanoUniv. di NapoliLaboratoire de Physique Subatomique & CosmologieUniv. of GlasgowUniv. of Illinois at ChicagoState Univ. of New York at BuffaloUniv. of KarlsruheUniv of Illinois at Urbana-ChampaignUniversit
catholique de Louvain
Argonne National LaboratoryLudwig-Maximilians-Universität MünchenRWTH-AachenINFN, Sezione di PaviaINFN, Sezione di MilanoMax-Planck-Institut für PhysikCEA SaclayOxford Univ.Institute of Nuclear PhysicsInstitute for High Energy PhysicsUniv. of California, Los AngelesUniv. of ManchesterDuke Univ.Univ. of WashingtonMoscow State Univ.Univ. of PaviaUniv. of OklahomaSouthern Methodist Univ.Univ. of SouthamptonMichigan State Univ.JINR-DubnaUniv. of California, RiversideJagiellonian Univ.Univ. of RochesterState Univ. of New York, Stony BrookUniv. of MilanoUniv. di NapoliLaboratoire de Physique Subatomique & CosmologieUniv. of GlasgowUniv. of Illinois at ChicagoState Univ. of New York at BuffaloUniv. of KarlsruheUniv of Illinois at Urbana-ChampaignUniversit
catholique de Louvain
CERNArgonne National LaboratoryLudwig-Maximilians-Universität MünchenRWTH-AachenINFN, Sezione di PaviaINFN, Sezione di MilanoMax-Planck-Institut für PhysikCEA SaclayOxford Univ.Institute of Nuclear PhysicsInstitute for High Energy PhysicsUniv. of California, Los AngelesUniv. of ManchesterDuke Univ.Univ. of WashingtonMoscow State Univ.Univ. of PaviaUniv. of OklahomaSouthern Methodist Univ.Univ. of SouthamptonMichigan State Univ.JINR-DubnaUniv. of California, RiversideJagiellonian Univ.Univ. of RochesterState Univ. of New York, Stony BrookUniv. of MilanoUniv. di NapoliLaboratoire de Physique Subatomique & CosmologieUniv. of GlasgowUniv. of Illinois at ChicagoState Univ. of New York at BuffaloUniv. of KarlsruheUniv of Illinois at Urbana-ChampaignUniversit
catholique de LouvainThe top quark and electroweak bosons (W and Z) represent the most massive
fundamental particles yet discovered, and as such refer directly to the
Standard Model's greatest remaining mystery: the mechanism by which all
particles gained mass. This report summarizes the work done within the top-ew
group of the Tevatron-for-LHC workshop. It represents a collection of both
Tevatron results, and LHC predictions. The hope is that by considering and
comparing both machines, the LHC program can be improved and aided by knowledge
from the Tevatron, and that particle physics as a whole can be enriched. The
report includes measurements of the top quark mass, searches for single top
quark production, and physics of the electroweak bosons at hadron colliders.

07 Feb 2024

Large language models (LLMs) are powerful tools for content moderation, but their inference costs and latency make them prohibitive for casual use on large datasets, such as the Google Ads repository. This study proposes a method for scaling up LLM reviews for content moderation in Google Ads. First, we use heuristics to select candidates via filtering and duplicate removal, and create clusters of ads for which we select one representative ad per cluster. We then use LLMs to review only the representative ads. Finally, we propagate the LLM decisions for the representative ads back to their clusters. This method reduces the number of reviews by more than 3 orders of magnitude while achieving a 2x recall compared to a baseline non-LLM model. The success of this approach is a strong function of the representations used in clustering and label propagation; we found that cross-modal similarity representations yield better results than uni-modal representations.
02 Apr 2025
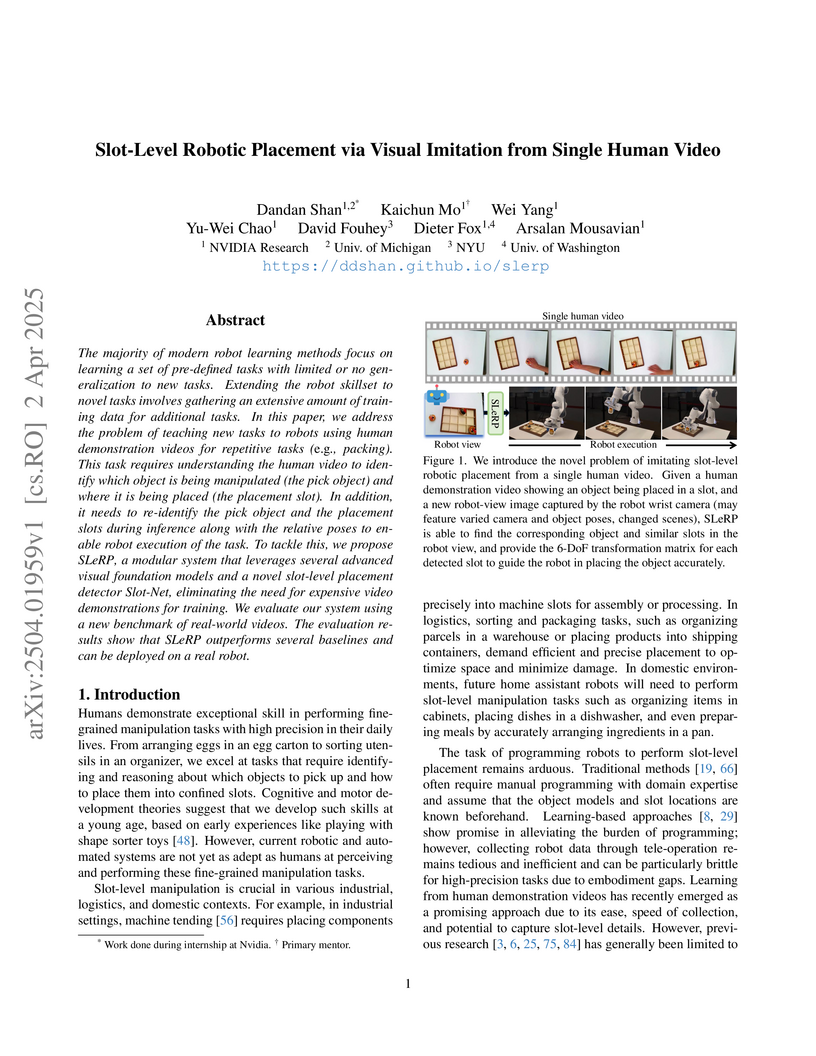
The majority of modern robot learning methods focus on learning a set of pre-defined tasks with limited or no generalization to new tasks. Extending the robot skillset to novel tasks involves gathering an extensive amount of training data for additional tasks. In this paper, we address the problem of teaching new tasks to robots using human demonstration videos for repetitive tasks (e.g., packing). This task requires understanding the human video to identify which object is being manipulated (the pick object) and where it is being placed (the placement slot). In addition, it needs to re-identify the pick object and the placement slots during inference along with the relative poses to enable robot execution of the task. To tackle this, we propose SLeRP, a modular system that leverages several advanced visual foundation models and a novel slot-level placement detector Slot-Net, eliminating the need for expensive video demonstrations for training. We evaluate our system using a new benchmark of real-world videos. The evaluation results show that SLeRP outperforms several baselines and can be deployed on a real robot.
There are no more papers matching your filters at the moment.
