
09 Dec 2025
The paper empirically investigates the performance of multi-agent LLM systems across diverse agentic tasks and architectures, revealing that benefits are highly contingent on task structure rather than universal. It establishes a quantitative scaling principle, achieving 87% accuracy in predicting optimal agent architectures for unseen tasks based on model capability, task properties, and measured coordination dynamics.

09 Dec 2025
This work presents a comprehensive engineering guide for designing and deploying production-grade agentic AI workflows, offering nine best practices demonstrated through a multimodal news-to-media generation case study. The approach improves system determinism, reliability, and responsible AI integration, reducing issues like hallucination and enabling scalable, maintainable deployments.
09 Dec 2025
Foundation models (FMs) are increasingly assuming the role of the "brain" of AI agents. While recent efforts have begun to equip FMs with native single-agent abilities -- such as GUI interaction or integrated tool use -- we argue that the next frontier is endowing FMs with native multi-agent intelligence. We identify four core capabilities of FMs in multi-agent contexts: understanding, planning, efficient communication, and adaptation. Contrary to assumptions about the spontaneous emergence of such abilities, we provide extensive empirical evidence across 41 large language models showing that strong single-agent performance alone does not automatically yield robust multi-agent intelligence. To address this gap, we outline key research directions -- spanning dataset construction, evaluation, training paradigms, and safety considerations -- for building FMs with native multi-agent intelligence.

08 Dec 2025
As Large Language Models (LLMs) increasingly operate as autonomous decision-makers in interactive and multi-agent systems and human societies, understanding their strategic behaviour has profound implications for safety, coordination, and the design of AI-driven social and economic infrastructures. Assessing such behaviour requires methods that capture not only what LLMs output, but the underlying intentions that guide their decisions. In this work, we extend the FAIRGAME framework to systematically evaluate LLM behaviour in repeated social dilemmas through two complementary advances: a payoff-scaled Prisoners Dilemma isolating sensitivity to incentive magnitude, and an integrated multi-agent Public Goods Game with dynamic payoffs and multi-agent histories. These environments reveal consistent behavioural signatures across models and languages, including incentive-sensitive cooperation, cross-linguistic divergence and end-game alignment toward defection. To interpret these patterns, we train traditional supervised classification models on canonical repeated-game strategies and apply them to FAIRGAME trajectories, showing that LLMs exhibit systematic, model- and language-dependent behavioural intentions, with linguistic framing at times exerting effects as strong as architectural differences. Together, these findings provide a unified methodological foundation for auditing LLMs as strategic agents and reveal systematic cooperation biases with direct implications for AI governance, collective decision-making, and the design of safe multi-agent systems.
09 Dec 2025
Deception is a fundamental challenge for multi-agent reasoning: effective systems must strategically conceal information while detecting misleading behavior in others. Yet most evaluations reduce deception to static classification, ignoring the interactive, adversarial, and longitudinal nature of real deceptive dynamics. Large language models (LLMs) can deceive convincingly but remain weak at detecting deception in peers. We present WOLF, a multi-agent social deduction benchmark based on Werewolf that enables separable measurement of deception production and detection. WOLF embeds role-grounded agents (Villager, Werewolf, Seer, Doctor) in a programmable LangGraph state machine with strict night-day cycles, debate turns, and majority voting. Every statement is a distinct analysis unit, with self-assessed honesty from speakers and peer-rated deceptiveness from others. Deception is categorized via a standardized taxonomy (omission, distortion, fabrication, misdirection), while suspicion scores are longitudinally smoothed to capture both immediate judgments and evolving trust dynamics. Structured logs preserve prompts, outputs, and state transitions for full reproducibility. Across 7,320 statements and 100 runs, Werewolves produce deceptive statements in 31% of turns, while peer detection achieves 71-73% precision with ~52% overall accuracy. Precision is higher for identifying Werewolves, though false positives occur against Villagers. Suspicion toward Werewolves rises from ~52% to over 60% across rounds, while suspicion toward Villagers and the Doctor stabilizes near 44-46%. This divergence shows that extended interaction improves recall against liars without compounding errors against truthful roles. WOLF moves deception evaluation beyond static datasets, offering a dynamic, controlled testbed for measuring deceptive and detective capacity in adversarial multi-agent interaction.
05 Dec 2025
Researchers at FAIR at Meta propose a strategic shift from developing autonomous self-improving AI to fostering human-AI co-improvement, aiming for a safer "co-superintelligence" that leverages complementary human and AI strengths. Their framework outlines eleven key collaborative development activities, emphasizing joint research to accelerate discovery while ensuring alignment and safety.

05 Dec 2025

Recent VLM-based agents aim to replicate OpenAI O3's ``thinking with images" via tool use, but most open-source methods limit input to a single image, falling short on real-world multi-image QA tasks. To address this, we propose IMAgent, an open-source vision agent trained via end-to-end reinforcement learning dedicated for complex multi-image tasks. By leveraging a multi-agent system, we generate challenging and visually-rich multi-image QA pairs to fully activate the tool-use potential of the base VLM. Through manual verification, we obtain MIFG-QA, comprising 10k samples for training and evaluation. With deeper reasoning steps, VLMs may increasingly ignore visual inputs. We therefore develop two specialized tools for visual reflection and confirmation, allowing the model to proactively reallocate its attention to image content during inference. Benefiting from our well-designed action-trajectory two-level mask strategy, IMAgent achieves stable tool use behavior via pure RL training without requiring costly supervised fine-tuning data. Extensive experiments demonstrate that IMAgent maintains strong performance on existing single-image benchmarks while achieving substantial improvements on our proposed multi-image dataset, with our analysis providing actionable insights for the research community. Codes and data will be released soon.
09 Dec 2025
In this paper, we examine the convergence landscape of multi-agent learning under uncertainty. Specifically, we analyze two stochastic models of regularized learning in continuous games -- one in continuous and one in discrete time with the aim of characterizing the long-run behavior of the induced sequence of play. In stark contrast to deterministic, full-information models of learning (or models with a vanishing learning rate), we show that the resulting dynamics do not converge in general. In lieu of this, we ask instead which actions are played more often in the long run, and by how much. We show that, in strongly monotone games, the dynamics of regularized learning may wander away from equilibrium infinitely often, but they always return to its vicinity in finite time (which we estimate), and their long-run distribution is sharply concentrated around a neighborhood thereof. We quantify the degree of this concentration, and we show that these favorable properties may all break down if the underlying game is not strongly monotone -- underscoring in this way the limits of regularized learning in the presence of persistent randomness and uncertainty.

09 Dec 2025
In this paper, we examine the robustness of Nash equilibria in continuous games, under both strategic and dynamic uncertainty. Starting with the former, we introduce the notion of a robust equilibrium as those equilibria that remain invariant to small -- but otherwise arbitrary -- perturbations to the game's payoff structure, and we provide a crisp geometric characterization thereof. Subsequently, we turn to the question of dynamic robustness, and we examine which equilibria may arise as stable limit points of the dynamics of "follow the regularized leader" (FTRL) in the presence of randomness and uncertainty. Despite their very distinct origins, we establish a structural correspondence between these two notions of robustness: strategic robustness implies dynamic robustness, and, conversely, the requirement of strategic robustness cannot be relaxed if dynamic robustness is to be maintained. Finally, we examine the rate of convergence to robust equilibria as a function of the underlying regularizer, and we show that entropically regularized learning converges at a geometric rate in games with affinely constrained action spaces.
10 Dec 2025
This chapter argues that the reliability of agentic and generative AI is chiefly an architectural property. We define agentic systems as goal-directed, tool-using decision makers operating in closed loops, and show how reliability emerges from principled componentisation (goal manager, planner, tool-router, executor, memory, verifiers, safety monitor, telemetry), disciplined interfaces (schema-constrained, validated, least-privilege tool calls), and explicit control and assurance loops. Building on classical foundations, we propose a practical taxonomy-tool-using agents, memory-augmented agents, planning and self-improvement agents, multi-agent systems, and embodied or web agents - and analyse how each pattern reshapes the reliability envelope and failure modes. We distil design guidance on typed schemas, idempotency, permissioning, transactional semantics, memory provenance and hygiene, runtime governance (budgets, termination conditions), and simulate-before-actuate safeguards.

10 Dec 2025
Collaborative pursuit-evasion in cluttered environments presents significant challenges due to sparse rewards and constrained Fields of View (FOV). Standard Multi-Agent Reinforcement Learning (MARL) often suffers from inefficient exploration and fails to scale to large scenarios. We propose PGF-MAPPO (Path-Guided Frontier MAPPO), a hierarchical framework bridging topological planning with reactive control. To resolve local minima and sparse rewards, we integrate an A*-based potential field for dense reward shaping. Furthermore, we introduce Directional Frontier Allocation, combining Farthest Point Sampling (FPS) with geometric angle suppression to enforce spatial dispersion and accelerate coverage. The architecture employs a parameter-shared decentralized critic, maintaining O(1) model complexity suitable for robotic swarms. Experiments demonstrate that PGF-MAPPO achieves superior capture efficiency against faster evaders. Policies trained on 10x10 maps exhibit robust zero-shot generalization to unseen 20x20 environments, significantly outperforming rule-based and learning-based baselines.

09 Dec 2025
We present SDialog, an MIT-licensed open-source Python toolkit that unifies dialog generation, evaluation and mechanistic interpretability into a single end-to-end framework for building and analyzing LLM-based conversational agents. Built around a standardized \texttt{Dialog} representation, SDialog provides: (1) persona-driven multi-agent simulation with composable orchestration for controlled, synthetic dialog generation, (2) comprehensive evaluation combining linguistic metrics, LLM-as-a-judge and functional correctness validators, (3) mechanistic interpretability tools for activation inspection and steering via feature ablation and induction, and (4) audio generation with full acoustic simulation including 3D room modeling and microphone effects. The toolkit integrates with all major LLM backends, enabling mixed-backend experiments under a unified API. By coupling generation, evaluation, and interpretability in a dialog-centric architecture, SDialog enables researchers to build, benchmark and understand conversational systems more systematically.

09 Dec 2025
rSIM introduces a multi-agent reinforcement learning framework that enables smaller large language models to acquire advanced reasoning skills by coupling them with a dedicated, learnable planner agent. This method allows models as small as 0.5B parameters to achieve reasoning performance comparable to much larger models across diverse tasks.

09 Dec 2025
Large Language Models and multi-agent systems have shown promise in decomposing complex tasks, yet they struggle with long-horizon reasoning tasks and escalating computation cost. This work introduces a hierarchical multi-agent architecture that distributes reasoning across a 64*64 grid of lightweight agents, supported by a selective oracle. A spatial curriculum progressively expands the operational region of the grid, ensuring that agents master easier central tasks before tackling harder peripheral ones. To improve reliability, the system integrates Negative Log-Likelihood as a measure of confidence, allowing the curriculum to prioritize regions where agents are both accurate and well calibrated. A Thompson Sampling curriculum manager adaptively chooses training zones based on competence and NLL-driven reward signals. We evaluate the approach on a spatially grounded Tower of Hanoi benchmark, which mirrors the long-horizon structure of many robotic manipulation and planning tasks. Results demonstrate improved stability, reduced oracle usage, and stronger long-range reasoning from distributed agent cooperation.

04 Dec 2025
As artificial intelligence (AI) agents are deployed across economic domains, understanding their strategic behavior and market-level impact becomes critical. This paper puts forward a groundbreaking new framework that is the first to capture the real-world economic forces that shape agentic labor markets: adverse selection, moral hazard, and reputation dynamics. Our framework encapsulates three core capabilities that successful LLM-agents will need: \textbf{metacognition} (accurate self-assessment of skills), \textbf{competitive awareness} (modeling rivals and market dynamics), and \textbf{long-horizon strategic planning}. We illustrate our framework through a tractable simulated gig economy where agentic Large Language Models (LLMs) compete for jobs, develop skills, and adapt their strategies under competitive pressure. Our simulations illustrate how LLM agents explicitly prompted with reasoning capabilities learn to strategically self-improve and demonstrate superior adaptability to changing market conditions. At the market level, our simulations reproduce classic macroeconomic phenomena found in human labor markets, while controlled experiments reveal potential AI-driven economic trends, such as rapid monopolization and systemic price deflation. This work provides a foundation to further explore the economic properties of AI-driven labour markets, and a conceptual framework to study the strategic reasoning capabilities in agents competing in the emerging economy.

08 Dec 2025

LatentMAS, a framework by researchers from Princeton, UIUC, and Stanford, enables large language model agents to collaborate purely within their continuous latent space, rather than using text. This approach substantially improves problem-solving accuracy by up to 14.6% and achieves 4x to 4.3x faster inference speeds while reducing output token usage by 70-80% compared to text-based multi-agent systems.
08 Dec 2025
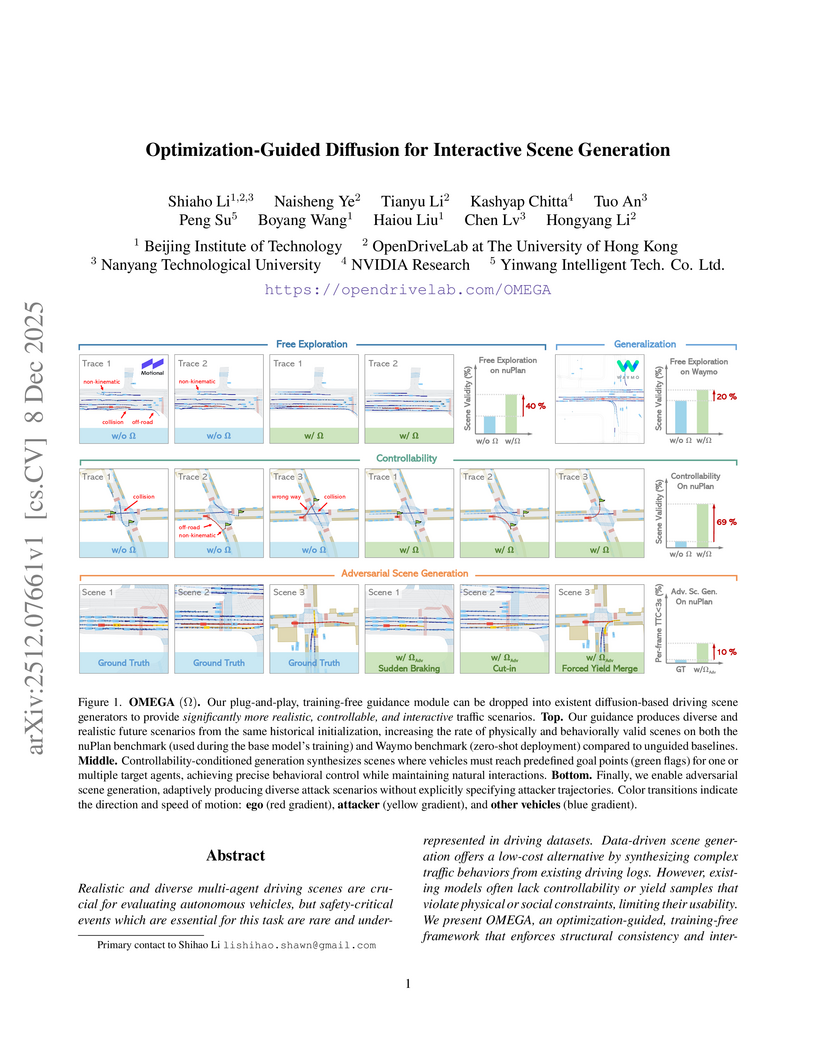
The OMEGA framework introduces a training-free method to enhance diffusion models for multi-agent driving scene generation, significantly boosting scenario realism, structural consistency, and controllability. It achieves a 72.27% valid scene rate on nuPlan, a 39.92 percentage point increase over baselines, and generates 5 times more near-collision frames for adversarial testing while maintaining plausibility.

08 Dec 2025
Specialized visual tools can augment large language models or vision language models with expert knowledge (e.g., grounding, spatial reasoning, medical knowledge, etc.), but knowing which tools to call (and when to call them) can be challenging. We introduce DART, a multi-agent framework that uses disagreements between multiple debating visual agents to identify useful visual tools (e.g., object detection, OCR, spatial reasoning, etc.) that can resolve inter-agent disagreement. These tools allow for fruitful multi-agent discussion by introducing new information, and by providing tool-aligned agreement scores that highlight agents in agreement with expert tools, thereby facilitating discussion. We utilize an aggregator agent to select the best answer by providing the agent outputs and tool information. We test DART on four diverse benchmarks and show that our approach improves over multi-agent debate as well as over single agent tool-calling frameworks, beating the next-strongest baseline (multi-agent debate with a judge model) by 3.4% and 2.4% on A-OKVQA and MMMU respectively. We also find that DART adapts well to new tools in applied domains, with a 1.3% improvement on the M3D medical dataset over other strong tool-calling, single agent, and multi-agent baselines. Additionally, we measure text overlap across rounds to highlight the rich discussion in DART compared to existing multi-agent methods. Finally, we study the tool call distribution, finding that diverse tools are reliably used to help resolve disagreement.
09 Dec 2025


The growing prevalence of artificial intelligence (AI) in various applications underscores the need for agents that can successfully navigate and adapt to an ever-changing, open-ended world. A key challenge is ensuring these AI agents are robust, excelling not only in familiar settings observed during training but also effectively generalising to previously unseen and varied scenarios. In this thesis, we harness methodologies from open-endedness and multi-agent learning to train and evaluate robust AI agents capable of generalising to novel environments, out-of-distribution inputs, and interactions with other co-player agents. We begin by introducing MiniHack, a sandbox framework for creating diverse environments through procedural content generation. Based on the game of NetHack, MiniHack enables the construction of new tasks for reinforcement learning (RL) agents with a focus on generalisation. We then present Maestro, a novel approach for generating adversarial curricula that progressively enhance the robustness and generality of RL agents in two-player zero-sum games. We further probe robustness in multi-agent domains, utilising quality-diversity methods to systematically identify vulnerabilities in state-of-the-art, pre-trained RL policies within the complex video game football domain, characterised by intertwined cooperative and competitive dynamics. Finally, we extend our exploration of robustness to the domain of LLMs. Here, our focus is on diagnosing and enhancing the robustness of LLMs against adversarial prompts, employing evolutionary search to generate a diverse range of effective inputs that aim to elicit undesirable outputs from an LLM. This work collectively paves the way for future advancements in AI robustness, enabling the development of agents that not only adapt to an ever-evolving world but also thrive in the face of unforeseen challenges and interactions.

10 Dec 2025
Building AI systems for GUI automation task has attracted remarkable research efforts, where MLLMs are leveraged for processing user requirements and give operations. However, GUI automation includes a wide range of tasks, from document processing to online shopping, from CAD to video editing. Diversity between particular tasks requires MLLMs for GUI automation to have heterogeneous capabilities and master multidimensional expertise, raising problems on constructing such a model. To address such challenge, we propose GAIR: GUI Automation via Information-Joint Reasoning and Group Reflection, a novel MLLM-based GUI automation agent framework designed for integrating knowledge and combining capabilities from heterogeneous models to build GUI automation agent systems with higher performance. Since different GUI-specific MLLMs are trained on different dataset and thus have different strengths, GAIR introduced a general-purpose MLLM for jointly processing the information from multiple GUI-specific models, further enhancing performance of the agent framework. The general-purpose MLLM also serves as decision maker, trying to execute a reasonable operation based on previously gathered information. When the general-purpose model thinks that there isn't sufficient information for a reasonable decision, GAIR would transit into group reflection status, where the general-purpose model would provide GUI-specific models with different instructions and hints based on their strengths and weaknesses, driving them to gather information with more significance and accuracy that can support deeper reasoning and decision. We evaluated the effectiveness and reliability of GAIR through extensive experiments on GUI benchmarks.
There are no more papers matching your filters at the moment.
