
16 Nov 2024

Label imbalance and homophily-heterophily mixture are the fundamental problems encountered when applying Graph Neural Networks (GNNs) to Graph Fraud Detection (GFD) tasks. Existing GNN-based GFD models are designed to augment graph structure to accommodate the inductive bias of GNNs towards homophily, by excluding heterophilic neighbors during message passing. In our work, we argue that the key to applying GNNs for GFD is not to exclude but to {\em distinguish} neighbors with different labels. Grounded in this perspective, we introduce Partitioning Message Passing (PMP), an intuitive yet effective message passing paradigm expressly crafted for GFD. Specifically, in the neighbor aggregation stage of PMP, neighbors with different classes are aggregated with distinct node-specific aggregation functions. By this means, the center node can adaptively adjust the information aggregated from its heterophilic and homophilic neighbors, thus avoiding the model gradient being dominated by benign nodes which occupy the majority of the population. We theoretically establish a connection between the spatial formulation of PMP and spectral analysis to characterize that PMP operates an adaptive node-specific spectral graph filter, which demonstrates the capability of PMP to handle heterophily-homophily mixed graphs. Extensive experimental results show that PMP can significantly boost the performance on GFD tasks.
11 Jun 2025


Recent advances toward foundation models for routing problems have shown
great potential of a unified deep model for various VRP variants. However, they
overlook the complex real-world customer distributions. In this work, we
advance the Multi-Task VRP (MTVRP) setting to the more realistic yet
challenging Multi-Task Multi-Distribution VRP (MTMDVRP) setting, and introduce
SHIELD, a novel model that leverages both sparsity and hierarchy principles.
Building on a deeper decoder architecture, we first incorporate the
Mixture-of-Depths (MoD) technique to enforce sparsity. This improves both
efficiency and generalization by allowing the model to dynamically select nodes
to use or skip each decoder layer, providing the needed capacity to adaptively
allocate computation for learning the task/distribution specific and shared
representations. We also develop a context-based clustering layer that exploits
the presence of hierarchical structures in the problems to produce better local
representations. These two designs inductively bias the network to identify key
features that are common across tasks and distributions, leading to
significantly improved generalization on unseen ones. Our empirical results
demonstrate the superiority of our approach over existing methods on 9
real-world maps with 16 VRP variants each.

07 Aug 2024
Existing neural constructive solvers for routing problems have predominantly employed transformer architectures, conceptualizing the route construction as a set-to-sequence learning task. However, their efficacy has primarily been demonstrated on entirely random problem instances that inadequately capture real-world scenarios. In this paper, we introduce realistic Traveling Salesman Problem (TSP) scenarios relevant to industrial settings and derive the following insights: (1) The optimal next node (or city) to visit often lies within proximity to the current node, suggesting the potential benefits of biasing choices based on current locations. (2) Effectively solving the TSP requires robust tracking of unvisited nodes and warrants succinct grouping strategies. Building upon these insights, we propose integrating a learnable choice layer inspired by Hypernetworks to prioritize choices based on the current location, and a learnable approximate clustering algorithm inspired by the Expectation-Maximization algorithm to facilitate grouping the unvisited cities. Together, these two contributions form a hierarchical approach towards solving the realistic TSP by considering both immediate local neighbourhoods and learning an intermediate set of node representations. Our hierarchical approach yields superior performance compared to both classical and recent transformer models, showcasing the efficacy of the key designs.
02 Mar 2022
The traveling salesman problem is a fundamental combinatorial optimization problem with strong exact algorithms. However, as problems scale up, these exact algorithms fail to provide a solution in a reasonable time. To resolve this, current works look at utilizing deep learning to construct reasonable solutions. Such efforts have been very successful, but tend to be slow and compute intensive. This paper exemplifies the integration of entropic regularized optimal transport techniques as a layer in a deep reinforcement learning network. We show that we can construct a model capable of learning without supervision and inferences significantly faster than current autoregressive approaches. We also empirically evaluate the benefits of including optimal transport algorithms within deep learning models to enforce assignment constraints during end-to-end training.
13 Jul 2023
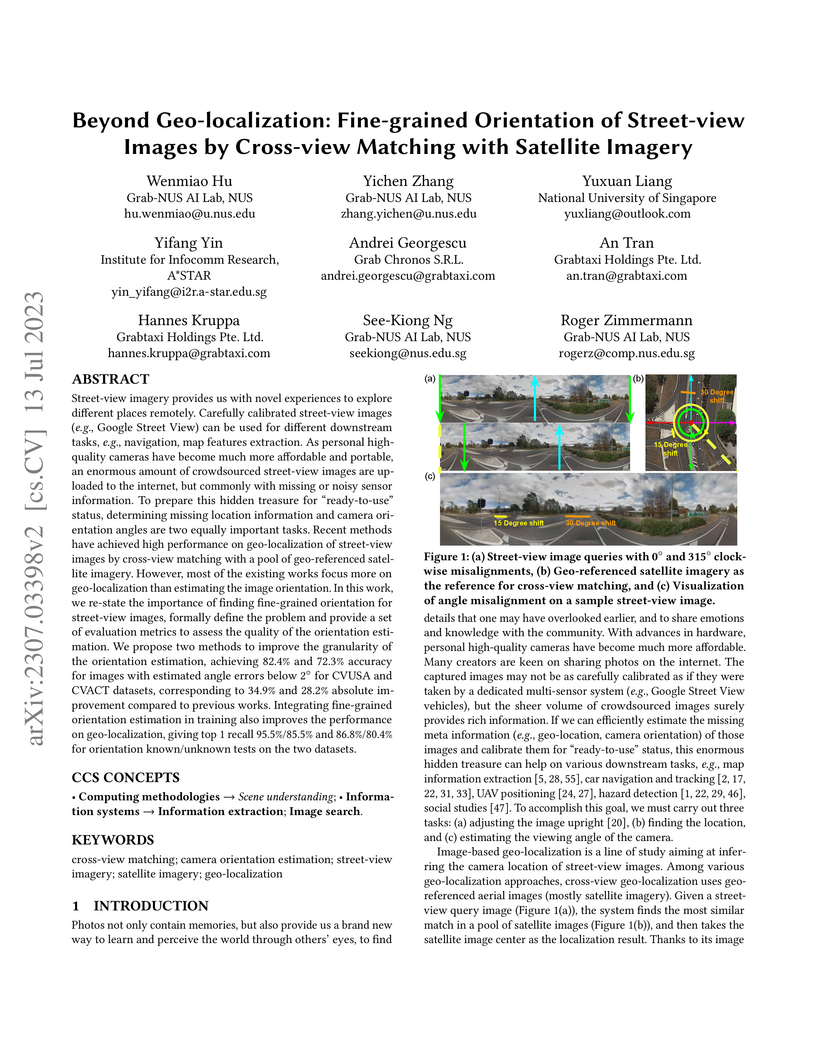
Street-view imagery provides us with novel experiences to explore different places remotely. Carefully calibrated street-view images (e.g. Google Street View) can be used for different downstream tasks, e.g. navigation, map features extraction. As personal high-quality cameras have become much more affordable and portable, an enormous amount of crowdsourced street-view images are uploaded to the internet, but commonly with missing or noisy sensor information. To prepare this hidden treasure for "ready-to-use" status, determining missing location information and camera orientation angles are two equally important tasks. Recent methods have achieved high performance on geo-localization of street-view images by cross-view matching with a pool of geo-referenced satellite imagery. However, most of the existing works focus more on geo-localization than estimating the image orientation. In this work, we re-state the importance of finding fine-grained orientation for street-view images, formally define the problem and provide a set of evaluation metrics to assess the quality of the orientation estimation. We propose two methods to improve the granularity of the orientation estimation, achieving 82.4% and 72.3% accuracy for images with estimated angle errors below 2 degrees for CVUSA and CVACT datasets, corresponding to 34.9% and 28.2% absolute improvement compared to previous works. Integrating fine-grained orientation estimation in training also improves the performance on geo-localization, giving top 1 recall 95.5%/85.5% and 86.8%/80.4% for orientation known/unknown tests on the two datasets.

19 Jun 2024
Satellite-based street-view information extraction by cross-view matching
refers to a task that extracts the location and orientation information of a
given street-view image query by using one or multiple geo-referenced satellite
images. Recent work has initiated a new research direction to find accurate
information within a local area covered by one satellite image centered at a
location prior (e.g., from GPS). It can be used as a standalone solution or
complementary step following a large-scale search with multiple satellite
candidates. However, these existing works require an accurate initial
orientation (angle) prior (e.g., from IMU) and/or do not efficiently search
through all possible poses. To allow efficient search and to give accurate
prediction regardless of the existence or the accuracy of the angle prior, we
present PetalView extractors with multi-scale search. The PetalView extractors
give semantically meaningful features that are equivalent across two
drastically different views, and the multi-scale search strategy efficiently
inspects the satellite image from coarse to fine granularity to provide
sub-meter and sub-degree precision extraction. Moreover, when an angle prior is
given, we propose a learnable prior angle mixer to utilize this information.
Our method obtains the best performance on the VIGOR dataset and successfully
improves the performance on KITTI dataset test 1 set with the recall within 1
meter (r@1m) for location estimation to 68.88% and recall within 1 degree
(r@1d) 21.10% when no angle prior is available, and with angle prior achieves
stable estimations at r@1m and r@1d above 70% and 21%, up to a 40-degree noise
level.
There are no more papers matching your filters at the moment.
