08 Jan 2020
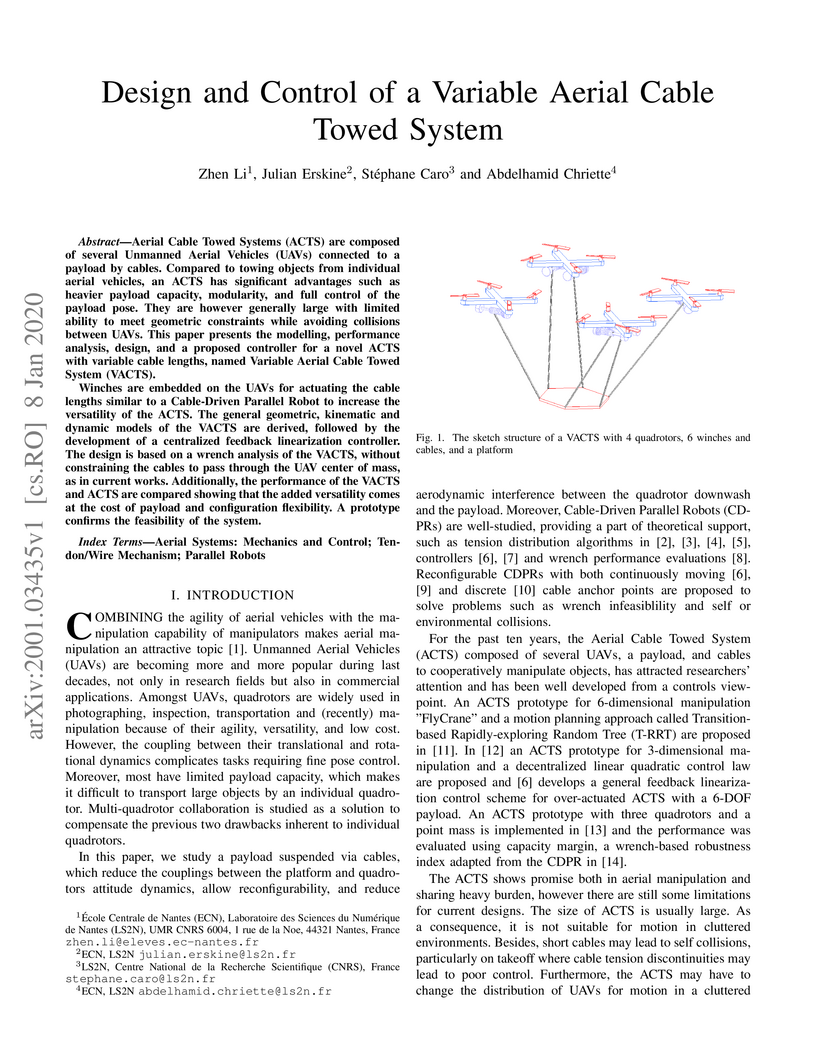
Aerial Cable Towed Systems (ACTS) are composed of several Unmanned Aerial
Vehicles (UAVs) connected to a payload by cables. Compared to towing objects
from individual aerial vehicles, an ACTS has significant advantages such as
heavier payload capacity, modularity, and full control of the payload pose.
They are however generally large with limited ability to meet geometric
constraints while avoiding collisions between UAVs. This paper presents the
modelling, performance analysis, design, and a proposed controller for a novel
ACTS with variable cable lengths, named Variable Aerial Cable Towed System
(VACTS).Winches are embedded on the UAVs for actuating the cable lengths
similar to a Cable-Driven Parallel Robot to increase the versatility of the
ACTS. The general geometric, kinematic and dynamic models of the VACTS are
derived, followed by the development of a centralized feedback linearization
controller. The design is based on a wrench analysis of the VACTS, without
constraining the cables to pass through the UAV center of mass, as in current
works. Additionally, the performance of the VACTS and ACTS are compared showing
that the added versatility comes at the cost of payload and configuration
flexibility. A prototype confirms the feasibility of the system.

01 Dec 2020

The data-driven computing paradigm initially introduced by Kirchdoerfer and Ortiz (2016) enables finite element computations in solid mechanics to be performed directly from material data sets, without an explicit material model. From a computational effort point of view, the most challenging task is the projection of admissible states at material points onto their closest states in the material data set. In this study, we compare and develop several possible data structures for solving the nearest-neighbor problem. We show that approximate nearest-neighbor (ANN) algorithms can accelerate material data searches by several orders of magnitude relative to exact searching algorithms. The approximations are suggested by--and adapted to--the structure of the data-driven iterative solver and result in no significant loss of solution accuracy. We assess the performance of the ANN algorithm with respect to material data set size with the aid of a 3D elasticity test case. We show that computations on a single processor with up to one billion material data points are feasible within a few seconds execution time with a speedup of more than 106 with respect to exact k-d trees.
29 Apr 2016

This paper investigates a situation pointed out in a recent paper, in which a
non-singular change of assembly mode of a planar 2-RPR-PR parallel manipulator
was realized by encircling a point of multiplicity 4. It is shown that this
situation is, in fact, a non-generic one and gives rise to cusps under a small
perturbation. Furthermore , we show that, for a large class of singularities of
multiplicity 4, there are only two types of stable singularities occurring in a
small perturbation: these two types are given by the complex square mapping and
the quarto mapping. Incidentally , this paper confirms the fact that,
generically, a local non-singular change of solution must be accomplished by
encircling a cusp point.

03 Apr 2025
This paper establishes a complete framework for infinitely nested logarithmic
improvements to regularity criteria for the three-dimensional incompressible
Navier-Stokes equations. Building upon our previous works on logarithmically
improved and multi-level logarithmically improved criteria, we demonstrate that
the limiting case of infinitely nested logarithms fully bridges the gap between
subcritical and critical regularity. Specifically, we prove that if the initial
data satisfies the condition
$\|(-\Delta)^{1/4}u_0\|_{L^q(\mathbb{R}^3)} \leq
C_0\Psi(\|u_0\|_{\dot{H}^{1/2}})\Psi$ incorporates infinitely nested
logarithmic factors with appropriate decay conditions, then there exists a
unique global-in-time smooth solution to the Navier-Stokes equations. This
result establishes global well-posedness at the critical regularity threshold
. The proof relies on infinitely nested commutator estimates, precise
characterization of the critical exponent function in the limiting case, and
careful analysis of the energy cascade. We also derive the exact Hausdorff
dimension bound for potential singular sets in this limiting case, proving that
the dimension reduces to zero. Through systematic construction of the limiting
function spaces and detailed analysis of the associated ODEs, we demonstrate
that infinitely nested logarithmic improvements provide a pathway to resolving
the global regularity question for the Navier-Stokes equations.
28 May 2025
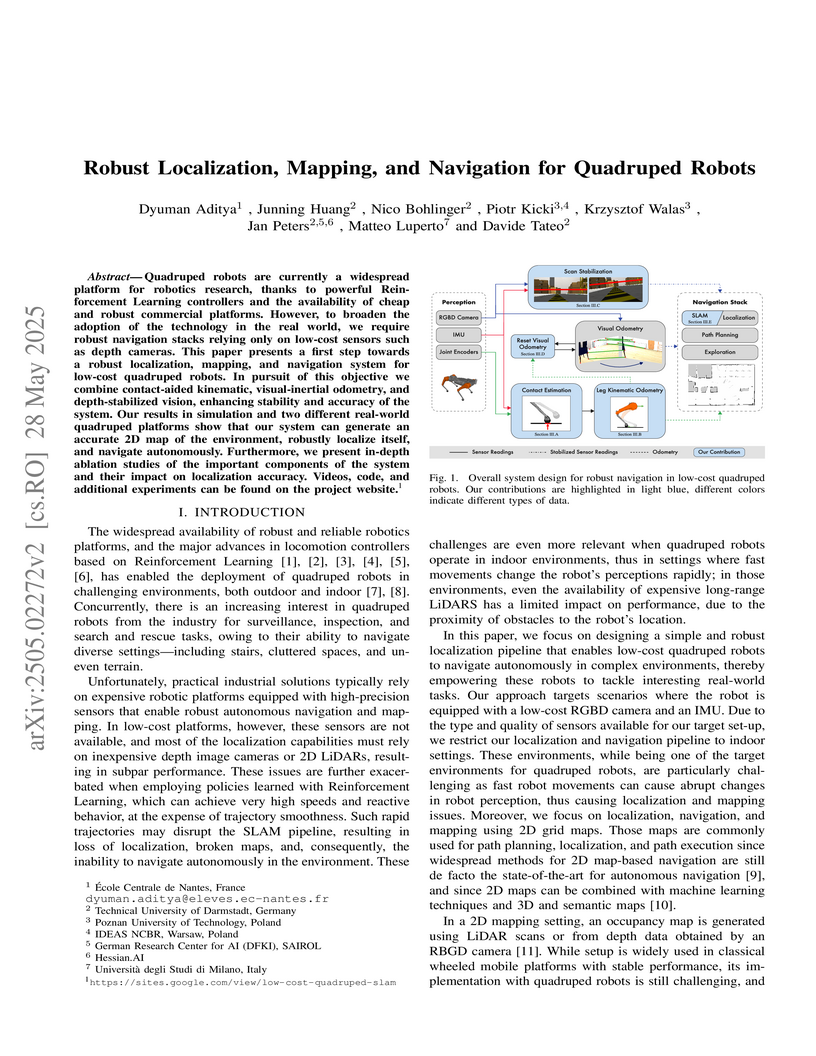
Quadruped robots are currently a widespread platform for robotics research,
thanks to powerful Reinforcement Learning controllers and the availability of
cheap and robust commercial platforms. However, to broaden the adoption of the
technology in the real world, we require robust navigation stacks relying only
on low-cost sensors such as depth cameras. This paper presents a first step
towards a robust localization, mapping, and navigation system for low-cost
quadruped robots. In pursuit of this objective we combine contact-aided
kinematic, visual-inertial odometry, and depth-stabilized vision, enhancing
stability and accuracy of the system. Our results in simulation and two
different real-world quadruped platforms show that our system can generate an
accurate 2D map of the environment, robustly localize itself, and navigate
autonomously. Furthermore, we present in-depth ablation studies of the
important components of the system and their impact on localization accuracy.
Videos, code, and additional experiments can be found on the project website:
this https URL
15 Jun 2021
This paper addresses the domain shift problem for segmentation. As a
solution, we propose OLVA, a novel and lightweight unsupervised domain
adaptation method based on a Variational Auto-Encoder (VAE) and Optimal
Transport (OT) theory. Thanks to the VAE, our model learns a shared
cross-domain latent space that follows a normal distribution, which reduces the
domain shift. To guarantee valid segmentations, our shared latent space is
designed to model the shape rather than the intensity variations. We further
rely on an OT loss to match and align the remaining discrepancy between the two
domains in the latent space. We demonstrate OLVA's effectiveness for the
segmentation of multiple cardiac structures on the public Multi-Modality Whole
Heart Segmentation (MM-WHS) dataset, where the source domain consists of
annotated 3D MR images and the unlabelled target domain of 3D CTs. Our results
show remarkable improvements with an additional margin of 12.5\% dice score
over concurrent generative training approaches.
19 Jun 2022

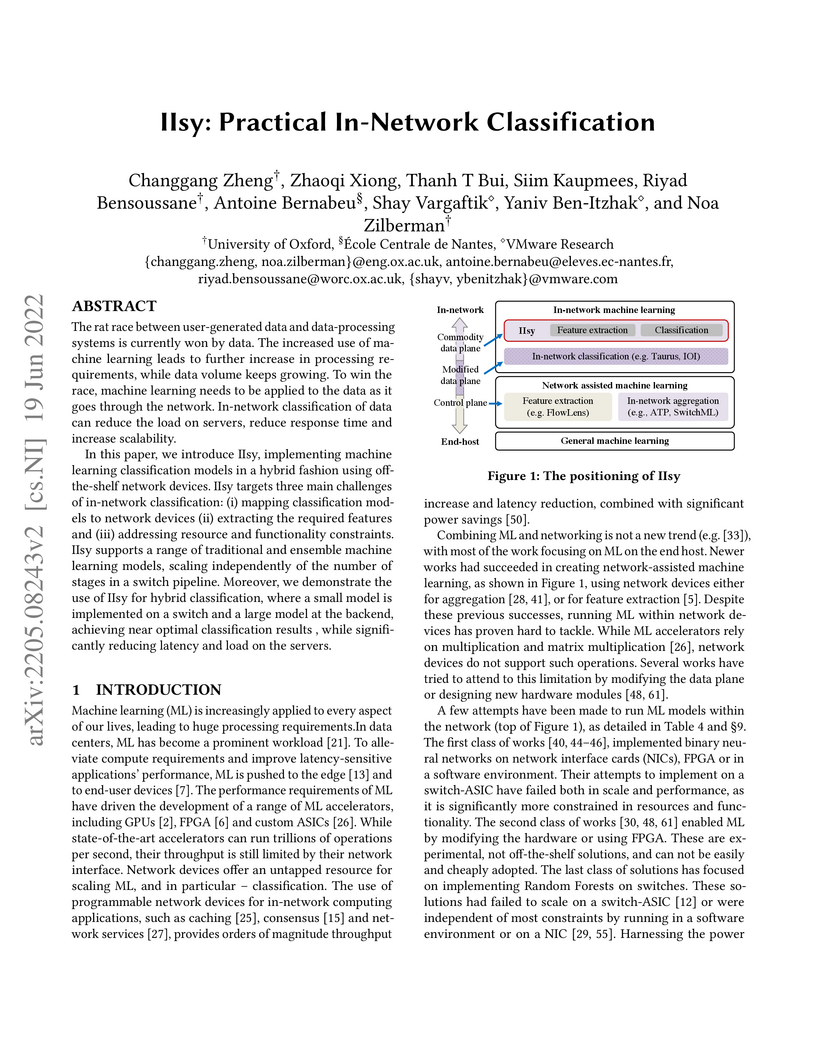
The rat race between user-generated data and data-processing systems is currently won by data. The increased use of machine learning leads to further increase in processing requirements, while data volume keeps growing. To win the race, machine learning needs to be applied to the data as it goes through the network. In-network classification of data can reduce the load on servers, reduce response time and increase scalability. In this paper, we introduce IIsy, implementing machine learning classification models in a hybrid fashion using off-the-shelf network devices. IIsy targets three main challenges of in-network classification: (i) mapping classification models to network devices (ii) extracting the required features and (iii) addressing resource and functionality constraints. IIsy supports a range of traditional and ensemble machine learning models, scaling independently of the number of stages in a switch pipeline. Moreover, we demonstrate the use of IIsy for hybrid classification, where a small model is implemented on a switch and a large model at the backend, achieving near optimal classification results, while significantly reducing latency and load on the servers.
30 Jan 2021
We present an accurate, fast and efficient method for segmentation and muscle mask propagation in 3D freehand ultrasound data, towards accurate volume quantification. A deep Siamese 3D Encoder-Decoder network that captures the evolution of the muscle appearance and shape for contiguous slices is deployed. We uses it to propagate a reference mask annotated by a clinical expert. To handle longer changes of the muscle shape over the entire volume and to provide an accurate propagation, we devise a Bidirectional Long Short Term Memory module. Also, to train our model with a minimal amount of training samples, we propose a strategy combining learning from few annotated 2D ultrasound slices with sequential pseudo-labeling of the unannotated slices. We introduce a decremental update of the objective function to guide the model convergence in the absence of large amounts of annotated data. After training with a small number of volumes, the decremental update transitions from a weakly-supervised training to a few-shot setting. Finally, to handle the class-imbalance between foreground and background muscle pixels, we propose a parametric Tversky loss function that learns to adaptively penalize false positives and false negatives. We validate our approach for the segmentation, label propagation, and volume computation of the three low-limb muscles on a dataset of 61600 images from 44 subjects. We achieve a Dice score coefficient of over and a volumetric error \textcolor{black}{of} .

11 Oct 2024
Cloud-to-ground lightning strikes observed in a specific geographical domain
over time can be naturally modeled by a spatio-temporal point process. Our
focus lies in the parametric estimation of its intensity function,
incorporating both spatial factors (such as altitude) and spatio-temporal
covariates (such as field temperature, precipitation, etc.). The events are
observed in France over a span of three years. Spatio-temporal covariates are
observed with resolution (km) and
six-hour periods. This results in an extensive dataset, further characterized
by a significant excess of zeroes (i.e., spatio-temporal cells with no observed
events). We reexamine composite likelihood methods commonly employed for
spatial point processes, especially in situations where covariates are
piecewise constant. Additionally, we extend these methods to account for
zero-deflated subsampling, a strategy involving dependent subsampling, with a
focus on selecting more cells in regions where events are observed. A
simulation study is conducted to illustrate these novel methodologies, followed
by their application to the dataset of lightning strikes.

09 Apr 2024



Occlusion presents a significant challenge for safety-critical applications such as autonomous driving. Collaborative perception has recently attracted a large research interest thanks to the ability to enhance the perception of autonomous vehicles via deep information fusion with intelligent roadside units (RSU), thus minimizing the impact of occlusion. While significant advancement has been made, the data-hungry nature of these methods creates a major hurdle for their real-world deployment, particularly due to the need for annotated RSU data. Manually annotating the vast amount of RSU data required for training is prohibitively expensive, given the sheer number of intersections and the effort involved in annotating point clouds. We address this challenge by devising a label-efficient object detection method for RSU based on unsupervised object discovery. Our paper introduces two new modules: one for object discovery based on a spatial-temporal aggregation of point clouds, and another for refinement. Furthermore, we demonstrate that fine-tuning on a small portion of annotated data allows our object discovery models to narrow the performance gap with, or even surpass, fully supervised models. Extensive experiments are carried out in simulated and real-world datasets to evaluate our method.
06 Aug 2024

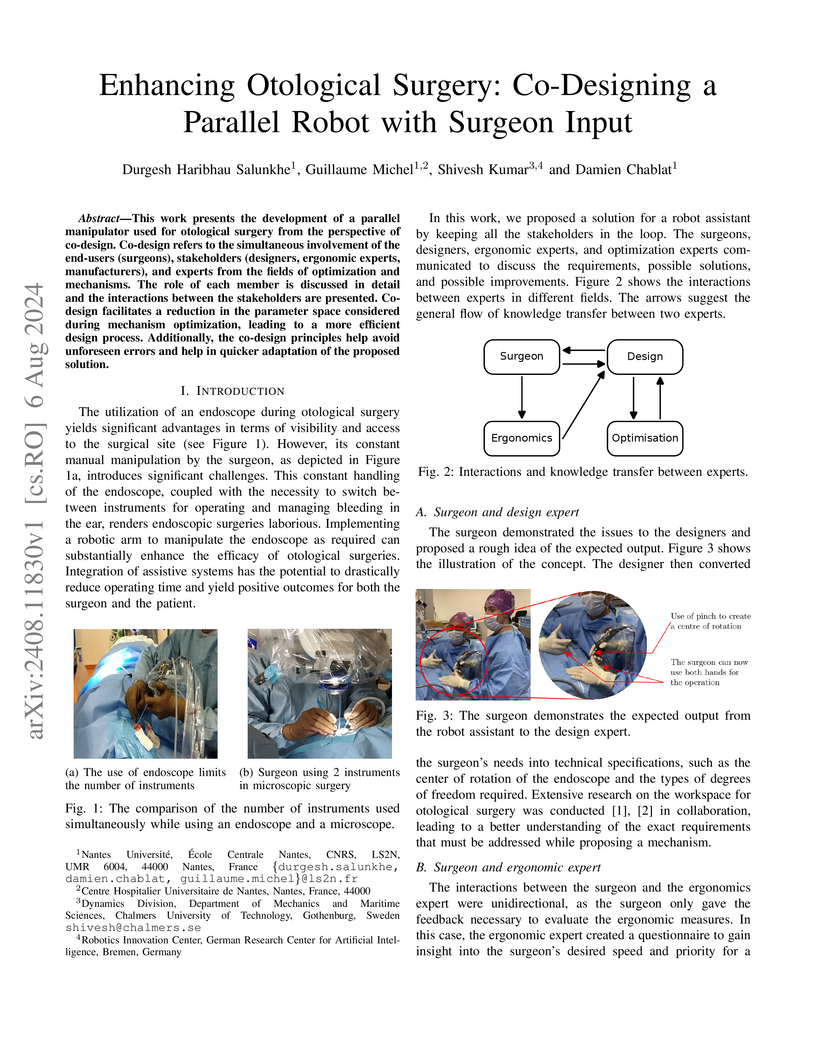
This work presents the development of a parallel manipulator used for
otological surgery from the perspective of co-design. Co-design refers to the
simultaneous involvement of the end-users (surgeons), stakeholders (designers,
ergonomic experts, manufacturers), and experts from the fields of optimization
and mechanisms. The role of each member is discussed in detail and the
interactions between the stakeholders are presented. Co-design facilitates a
reduction in the parameter space considered during mechanism optimization,
leading to a more efficient design process. Additionally, the co-design
principles help avoid unforeseen errors and help in quicker adaptation of the
proposed solution.
20 Sep 2024
We present a comparison between two approaches to modelling hyperelastic
material behaviour using data. The first approach is a novel approach based on
Data-driven Computational Mechanics (DDCM) that completely bypasses the
definition of a material model by using only data from simulations or real-life
experiments to perform computations. The second is a neural network (NN) based
approach, where a neural network is used as a constitutive model. It is trained
on data to learn the underlying material behaviour and is implemented in the
same way as conventional models. The DDCM approach has been extended to include
strategies for recovering isotropic behaviour and local smoothing of data.
These have proven to be critical in certain cases and increase accuracy in most
cases. The NN approach contains certain elements to enforce principles such as
material symmetry, thermodynamic consistency, and convexity. In order to
provide a fair comparison between the approaches, they use the same data and
solve the same numerical problems with a selection of problems highlighting the
advantages and disadvantages of each approach. Both the DDCM and the NNs have
shown acceptable performance. The DDCM performed better when applied to cases
similar to those from which the data is gathered from, albeit at the expense of
generality, whereas NN models were more advantageous when applied to wider
range of applications.

25 Mar 2025
This paper introduces a novel class of initial data for which the
three-dimensional incompressible Navier--Stokes equations yield unique
global-in-time solutions. Building on a logarithmically improved regularity
criterion, we impose a logarithmically subcritical condition on the initial
data. Specifically, if \[ u_0 \in L^2(\mathbb{R}^3) \quad \text{and} \quad
\|(-\Delta)^{s/2}u_0\|_{L^q(\mathbb{R}^3)} \le
\frac{C_0}{\Bigl(1+\log\bigl(e+\|u_0\|_{\dot{H}^s}\bigr)\Bigr)^{\delta}}, \]
for some under appropriate scaling, then the corresponding
solution exists globally and is unique. The proof employs refined commutator
estimates for the fractional Laplacian together with new energy methods that
exploit this logarithmic improvement to prevent singularity formation.
Furthermore, we establish links between these improved criteria and
turbulence theory. We derive precise relationships connecting the regularity
conditions with turbulent intermittency, showing that the logarithmic
enhancements correspond to anomalous scaling exponents in the turbulent energy
spectrum. Additionally, we characterize the local structure of potential
singularities and provide tight bounds on the energy flux in turbulent
cascades. This approach bridges the gap between subcritical and critical
regularity for the Navier--Stokes equations and offers a robust mathematical
foundation for key phenomena observed in turbulence.

31 Mar 2025
This paper extends our previous results on logarithmically improved
regularity criteria for the three-dimensional Navier-Stokes equations by
establishing a comprehensive framework of multi-level logarithmic improvements.
We prove that if the initial data satisfies a
nested logarithmically weakened condition
$\|(-\Delta)^{s/2}u_0\|_{L^q(\mathbb{R}^3)} \leq \frac{C_0}{\prod_{j=1}^{n} (1
+ L_j(\|u_0\|_{\dot{H}^s}))^{\delta_j}}s \in (1/2, 1)L_j$
represents -fold nested logarithms, then the corresponding solution exists
globally in time and is unique. The proof introduces a novel sequence of
increasingly precise commutator estimates incorporating multiple layers of
logarithmic corrections. We establish the existence of a critical threshold
function that completely characterizes the
boundary between global regularity and potential singularity formation, with
explicit asymptotics as approaches the critical value . This paper
further provides a rigorous geometric characterization of potential singular
structures through refined multi-fractal analysis, showing that any singular
set must have Hausdorff dimension bounded by $1 - \sum_{j=1}^n
\frac{\delta_j}{1+\delta_j} \cdot \frac{1}{j+1}$. Our results constitute a
significant advancement toward resolving the global regularity question for the
Navier-Stokes equations, as we demonstrate that with properly calibrated
sequences of nested logarithmic improvements, the gap to the critical case can
be systematically reduced.

18 Sep 2008

Muscle fatigue is defined as the point at which the muscle is no longer able to sustain the required force or work output level. The overexertion of muscle force and muscle fatigue can induce acute pain and chronic pain in human body. When muscle fatigue is accumulated, the functional disability can be resulted as musculoskeletal disorders (MSD). There are several posture exposure analysis methods useful for rating the MSD risks, but they are mainly based on static postures. Even in some fatigue evaluation methods, muscle fatigue evaluation is only available for static postures, but not suitable for dynamic working process. Meanwhile, some existing muscle fatigue models based on physiological models cannot be easily used in industrial ergonomic evaluations. The external dynamic load is definitely the most important factor resulting muscle fatigue, thus we propose a new fatigue model under a framework for evaluating fatigue in dynamic working processes. Under this framework, virtual reality system is taken to generate virtual working environment, which can be interacted with the work with haptic interfaces and optical motion capture system. The motion information and load information are collected and further processed to evaluate the overall work load of the worker based on dynamic muscle fatigue models and other work evaluation criterions and to give new information to characterize the penibility of the task in design process.

20 Jun 2015
Automated verification of living organism models allows us to gain previously unknown knowledge about underlying biological processes. In this paper, we show the benefits to use parametric time Petri nets in order to analyze precisely the dynamic behavior of biological oscillatory systems. In particular, we focus on the resilience properties of such systems. This notion is crucial to understand the behavior of biological systems (e.g. the mammalian circadian rhythm) that are reactive and adaptive enough to endorse major changes in their environment (e.g. jet-lags, day-night alternating work-time). We formalize these properties through parametric TCTL and demonstrate how changes of the environmental conditions can be tackled to guarantee the resilience of living organisms. In particular, we are able to discuss the influence of various perturbations, e.g. artificial jet-lag or components knock-out, with regard to quantitative delays. This analysis is crucial when it comes to model elicitation for dynamic biological systems. We demonstrate the applicability of this technique using a simplified model of circadian clock.

22 Jul 2024
In autonomous robotics, a critical challenge lies in developing robust
solutions for Active Collaborative SLAM, wherein multiple robots
collaboratively explore and map an unknown environment while intelligently
coordinating their movements and sensor data acquisitions. In this article, we
present an efficient centralized frontier sharing approach that maximizes
exploration by taking into account information gain in the merged map,
distance, and reward computation among frontier candidates and encourages the
spread of agents into the environment. Eventually, our method efficiently
spreads the robots for maximum exploration while keeping SLAM uncertainty low.
Additionally, we also present two coordination approaches, synchronous and
asynchronous to prioritize robot goal assignments by the central server. The
proposed method is implemented in ROS and evaluated through simulation and
experiments on publicly available datasets and similar methods, rendering
promising results.
04 Jan 2021
Cable-Driven Parallel Robots (CDPRs) offer high payload capacities, large translational workspace and high dynamic performances. The rigid base frame of the CDPR is connected in parallel to the moving platform using cables. However, their orientation workspace is usually limited due to cable/cable and cable/moving platform collisions. This paper deals with the design, modelling and prototyping of a hybrid robot. This robot, which is composed of a CDPR mounted in series with a Parallel Spherical Wrist (PSW), has both a large translational workspace and an unlimited orientation workspace. It should be noted that the six degrees of freedom (DOF) motions of the moving platform of the CDPR, namely, the base of the PSW, and the three-DOF motion of the PSW are actuated by means of eight actuators fixed to the base. As a consequence, the overall system is underactuated and its total mass and inertia in motion is reduced.

09 Nov 2021
This paper is about the stabilization of a cascade system composed by an infinite-dimensional system, that we suppose to be exponentially stable, and an ordinary differential equation (ODE), that we suppose to be marginally stable. The system is controlled through the infinite-dimensional system. Such a structure is particularly useful when applying the internal model approach on infinite-dimensional systems. Our strategy relies on the forwarding method, which uses a Lyapunov functional and a Sylvester equation to build a feedback-law. Under some classical assumptions in the output regulation theory, we prove that the closed-loop system is globally exponentially stable.
11 Jan 2022
We consider flows of ordinary differential equations (ODEs) driven by path
differentiable vector fields. Path differentiable functions constitute a proper
subclass of Lipschitz functions which admit conservative gradients, a notion of
generalized derivative compatible with basic calculus rules. Our main result
states that such flows inherit the path differentiability property of the
driving vector field. We show indeed that forward propagation of derivatives
given by the sensitivity differential inclusions provide a conservative
Jacobian for the flow. This allows to propose a nonsmooth version of the
adjoint method, which can be applied to integral costs under an ODE constraint.
This result constitutes a theoretical ground to the application of small step
first order methods to solve a broad class of nonsmooth optimization problems
with parametrized ODE constraints. This is illustrated with the convergence of
small step first order methods based on the proposed nonsmooth adjoint.
There are no more papers matching your filters at the moment.
