16 Nov 2022



While significant research advances have been made in the field of deep
reinforcement learning, there have been no concrete adversarial attack
strategies in literature tailored for studying the vulnerability of deep
reinforcement learning algorithms to membership inference attacks. In such
attacking systems, the adversary targets the set of collected input data on
which the deep reinforcement learning algorithm has been trained. To address
this gap, we propose an adversarial attack framework designed for testing the
vulnerability of a state-of-the-art deep reinforcement learning algorithm to a
membership inference attack. In particular, we design a series of experiments
to investigate the impact of temporal correlation, which naturally exists in
reinforcement learning training data, on the probability of information
leakage. Moreover, we compare the performance of \emph{collective} and
\emph{individual} membership attacks against the deep reinforcement learning
algorithm. Experimental results show that the proposed adversarial attack
framework is surprisingly effective at inferring data with an accuracy
exceeding in individual and in collective modes in three
different continuous control Mujoco tasks, which raises serious privacy
concerns in this regard. Finally, we show that the learning state of the
reinforcement learning algorithm influences the level of privacy breaches
significantly.
03 Oct 2018
Traffic sign recognition is a very important computer vision task for a number of real-world applications such as intelligent transportation surveillance and analysis. While deep neural networks have been demonstrated in recent years to provide state-of-the-art performance traffic sign recognition, a key challenge for enabling the widespread deployment of deep neural networks for embedded traffic sign recognition is the high computational and memory requirements of such networks. As a consequence, there are significant benefits in investigating compact deep neural network architectures for traffic sign recognition that are better suited for embedded devices. In this paper, we introduce MicronNet, a highly compact deep convolutional neural network for real-time embedded traffic sign recognition designed based on macroarchitecture design principles (e.g., spectral macroarchitecture augmentation, parameter precision optimization, etc.) as well as numerical microarchitecture optimization strategies. The resulting overall architecture of MicronNet is thus designed with as few parameters and computations as possible while maintaining recognition performance, leading to optimized information density of the proposed network. The resulting MicronNet possesses a model size of just ~1MB and ~510,000 parameters (~27x fewer parameters than state-of-the-art) while still achieving a human performance level top-1 accuracy of 98.9% on the German traffic sign recognition benchmark. Furthermore, MicronNet requires just ~10 million multiply-accumulate operations to perform inference, and has a time-to-compute of just 32.19 ms on a Cortex-A53 high efficiency processor. These experimental results show that highly compact, optimized deep neural network architectures can be designed for real-time traffic sign recognition that are well-suited for embedded scenarios.
23 Jan 2023

There can be numerous electronic components on a given PCB, making the task of visual inspection to detect defects very time-consuming and prone to error, especially at scale. There has thus been significant interest in automatic PCB component detection, particularly leveraging deep learning. However, deep neural networks typically require high computational resources, possibly limiting their feasibility in real-world use cases in manufacturing, which often involve high-volume and high-throughput detection with constrained edge computing resource availability. As a result of an exploration of efficient deep neural network architectures for this use case, we introduce PCBDet, an attention condenser network design that provides state-of-the-art inference throughput while achieving superior PCB component detection performance compared to other state-of-the-art efficient architecture designs. Experimental results show that PCBDet can achieve up to 2 inference speed-up on an ARM Cortex A72 processor when compared to an EfficientNet-based design while achieving 2-4\% higher mAP on the FICS-PCB benchmark dataset.
25 Apr 2022
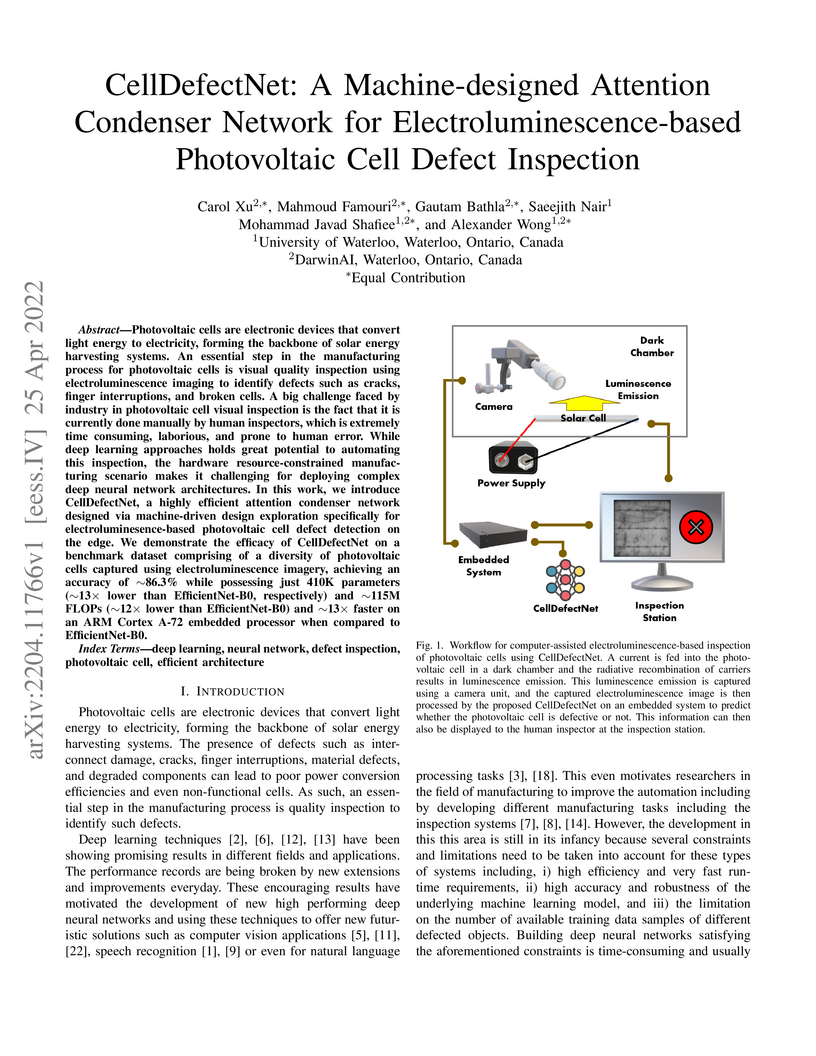
Photovoltaic cells are electronic devices that convert light energy to
electricity, forming the backbone of solar energy harvesting systems. An
essential step in the manufacturing process for photovoltaic cells is visual
quality inspection using electroluminescence imaging to identify defects such
as cracks, finger interruptions, and broken cells. A big challenge faced by
industry in photovoltaic cell visual inspection is the fact that it is
currently done manually by human inspectors, which is extremely time consuming,
laborious, and prone to human error. While deep learning approaches holds great
potential to automating this inspection, the hardware resource-constrained
manufacturing scenario makes it challenging for deploying complex deep neural
network architectures. In this work, we introduce CellDefectNet, a highly
efficient attention condenser network designed via machine-driven design
exploration specifically for electroluminesence-based photovoltaic cell defect
detection on the edge. We demonstrate the efficacy of CellDefectNet on a
benchmark dataset comprising of a diversity of photovoltaic cells captured
using electroluminescence imagery, achieving an accuracy of ~86.3% while
possessing just 410K parameters (~13 lower than EfficientNet-B0,
respectively) and ~115M FLOPs (~12 lower than EfficientNet-B0) and
~13 faster on an ARM Cortex A-72 embedded processor when compared to
EfficientNet-B0.
27 Apr 2022
Neural Architecture Search (NAS) has enabled automatic discovery of more
efficient neural network architectures, especially for mobile and embedded
vision applications. Although recent research has proposed ways of quickly
estimating latency on unseen hardware devices with just a few samples, little
focus has been given to the challenges of estimating latency on runtimes using
optimized graphs, such as TensorRT and specifically for edge devices. In this
work, we propose MAPLE-Edge, an edge device-oriented extension of MAPLE, the
state-of-the-art latency predictor for general purpose hardware, where we train
a regression network on architecture-latency pairs in conjunction with a
hardware-runtime descriptor to effectively estimate latency on a diverse pool
of edge devices. Compared to MAPLE, MAPLE-Edge can describe the runtime and
target device platform using a much smaller set of CPU performance counters
that are widely available on all Linux kernels, while still achieving up to
+49.6% accuracy gains against previous state-of-the-art baseline methods on
optimized edge device runtimes, using just 10 measurements from an unseen
target device. We also demonstrate that unlike MAPLE which performs best when
trained on a pool of devices sharing a common runtime, MAPLE-Edge can
effectively generalize across runtimes by applying a trick of normalizing
performance counters by the operator latency, in the measured hardware-runtime
descriptor. Lastly, we show that for runtimes exhibiting lower than desired
accuracy, performance can be boosted by collecting additional samples from the
target device, with an extra 90 samples translating to gains of nearly +40%.
26 Sep 2023
We explore calibration properties at various precisions for three
architectures: ShuffleNetv2, GhostNet-VGG, and MobileOne; and two datasets:
CIFAR-100 and PathMNIST. The quality of calibration is observed to track the
quantization quality; it is well-documented that performance worsens with lower
precision, and we observe a similar correlation with poorer calibration. This
becomes especially egregious at 4-bit activation regime. GhostNet-VGG is shown
to be the most robust to overall performance drop at lower precision. We find
that temperature scaling can improve calibration error for quantized networks,
with some caveats. We hope that these preliminary insights can lead to more
opportunities for explainable and reliable EdgeML.

07 Apr 2017
A promising paradigm for achieving highly efficient deep neural networks is
the idea of evolutionary deep intelligence, which mimics biological evolution
processes to progressively synthesize more efficient networks. A crucial design
factor in evolutionary deep intelligence is the genetic encoding scheme used to
simulate heredity and determine the architectures of offspring networks. In
this study, we take a deeper look at the notion of synaptic cluster-driven
evolution of deep neural networks which guides the evolution process towards
the formation of a highly sparse set of synaptic clusters in offspring
networks. Utilizing a synaptic cluster-driven genetic encoding, the
probabilistic encoding of synaptic traits considers not only individual
synaptic properties but also inter-synaptic relationships within a deep neural
network. This process results in highly sparse offspring networks which are
particularly tailored for parallel computational devices such as GPUs and deep
neural network accelerator chips. Comprehensive experimental results using four
well-known deep neural network architectures (LeNet-5, AlexNet, ResNet-56, and
DetectNet) on two different tasks (object categorization and object detection)
demonstrate the efficiency of the proposed method. Cluster-driven genetic
encoding scheme synthesizes networks that can achieve state-of-the-art
performance with significantly smaller number of synapses than that of the
original ancestor network. (125-fold decrease in synapses for MNIST).
Furthermore, the improved cluster efficiency in the generated offspring
networks (9.71-fold decrease in clusters for MNIST and a 8.16-fold
decrease in clusters for KITTI) is particularly useful for accelerated
performance on parallel computing hardware architectures such as those in GPUs
and deep neural network accelerator chips.

20 Dec 2022
Light guide plates are essential optical components widely used in a diverse
range of applications ranging from medical lighting fixtures to back-lit TV
displays. In this work, we introduce a fully-integrated, high-throughput,
high-performance deep learning-driven workflow for light guide plate surface
visual quality inspection (VQI) tailored for real-world manufacturing
environments. To enable automated VQI on the edge computing within the
fully-integrated VQI system, a highly compact deep anti-aliased attention
condenser neural network (which we name LightDefectNet) tailored specifically
for light guide plate surface defect detection in resource-constrained
scenarios was created via machine-driven design exploration with computational
and "best-practices" constraints as well as L_1 paired classification
discrepancy loss. Experiments show that LightDetectNet achieves a detection
accuracy of ~98.2% on the LGPSDD benchmark while having just 770K parameters
(~33X and ~6.9X lower than ResNet-50 and EfficientNet-B0, respectively) and
~93M FLOPs (~88X and ~8.4X lower than ResNet-50 and EfficientNet-B0,
respectively) and ~8.8X faster inference speed than EfficientNet-B0 on an
embedded ARM processor. As such, the proposed deep learning-driven workflow,
integrated with the aforementioned LightDefectNet neural network, is highly
suited for high-throughput, high-performance light plate surface VQI within
real-world manufacturing environments.
08 Jul 2021
The fine-grained relationship between form and function with respect to deep
neural network architecture design and hardware-specific acceleration is one
area that is not well studied in the research literature, with form often
dictated by accuracy as opposed to hardware function. In this study, a
comprehensive empirical exploration is conducted to investigate the impact of
deep neural network architecture design on the degree of inference speedup that
can be achieved via hardware-specific acceleration. More specifically, we
empirically study the impact of a variety of commonly used macro-architecture
design patterns across different architectural depths through the lens of
OpenVINO microprocessor-specific and GPU-specific acceleration. Experimental
results showed that while leveraging hardware-specific acceleration achieved an
average inference speed-up of 380%, the degree of inference speed-up varied
drastically depending on the macro-architecture design pattern, with the
greatest speedup achieved on the depthwise bottleneck convolution design
pattern at 550%. Furthermore, we conduct an in-depth exploration of the
correlation between FLOPs requirement, level 3 cache efficacy, and network
latency with increasing architectural depth and width. Finally, we analyze the
inference time reductions using hardware-specific acceleration when compared to
native deep learning frameworks across a wide variety of hand-crafted deep
convolutional neural network architecture designs as well as ones found via
neural architecture search strategies. We found that the DARTS-derived
architecture to benefit from the greatest improvement from hardware-specific
software acceleration (1200%) while the depthwise bottleneck convolution-based
MobileNet-V2 to have the lowest overall inference time of around 2.4 ms.

22 Aug 2023
Vision transformers have shown unprecedented levels of performance in tackling various visual perception tasks in recent years. However, the architectural and computational complexity of such network architectures have made them challenging to deploy in real-world applications with high-throughput, low-memory requirements. As such, there has been significant research recently on the design of efficient vision transformer architectures. In this study, we explore the generation of fast vision transformer architecture designs via generative architecture search (GAS) to achieve a strong balance between accuracy and architectural and computational efficiency. Through this generative architecture search process, we create TurboViT, a highly efficient hierarchical vision transformer architecture design that is generated around mask unit attention and Q-pooling design patterns. The resulting TurboViT architecture design achieves significantly lower architectural computational complexity (>2.47 smaller than FasterViT-0 while achieving same accuracy) and computational complexity (>3.4 fewer FLOPs and 0.9% higher accuracy than MobileViT2-2.0) when compared to 10 other state-of-the-art efficient vision transformer network architecture designs within a similar range of accuracy on the ImageNet-1K dataset. Furthermore, TurboViT demonstrated strong inference latency and throughput in both low-latency and batch processing scenarios (>3.21 lower latency and >3.18 higher throughput compared to FasterViT-0 for low-latency scenario). These promising results demonstrate the efficacy of leveraging generative architecture search for generating efficient transformer architecture designs for high-throughput scenarios.
20 Nov 2017
SquishedNets: Squishing SqueezeNet further for edge device scenarios via deep evolutionary synthesis
SquishedNets: Squishing SqueezeNet further for edge device scenarios via deep evolutionary synthesis
While deep neural networks have been shown in recent years to outperform other machine learning methods in a wide range of applications, one of the biggest challenges with enabling deep neural networks for widespread deployment on edge devices such as mobile and other consumer devices is high computational and memory requirements. Recently, there has been greater exploration into small deep neural network architectures that are more suitable for edge devices, with one of the most popular architectures being SqueezeNet, with an incredibly small model size of 4.8MB. Taking further advantage of the notion that many applications of machine learning on edge devices are often characterized by a low number of target classes, this study explores the utility of combining architectural modifications and an evolutionary synthesis strategy for synthesizing even smaller deep neural architectures based on the more recent SqueezeNet v1.1 macroarchitecture for applications with fewer target classes. In particular, architectural modifications are first made to SqueezeNet v1.1 to accommodate for a 10-class ImageNet-10 dataset, and then an evolutionary synthesis strategy is leveraged to synthesize more efficient deep neural networks based on this modified macroarchitecture. The resulting SquishedNets possess model sizes ranging from 2.4MB to 0.95MB (~5.17X smaller than SqueezeNet v1.1, or 253X smaller than AlexNet). Furthermore, the SquishedNets are still able to achieve accuracies ranging from 81.2% to 77%, and able to process at speeds of 156 images/sec to as much as 256 images/sec on a Nvidia Jetson TX1 embedded chip. These preliminary results show that a combination of architectural modifications and an evolutionary synthesis strategy can be a useful tool for producing very small deep neural network architectures that are well-suited for edge device scenarios.
29 Nov 2021
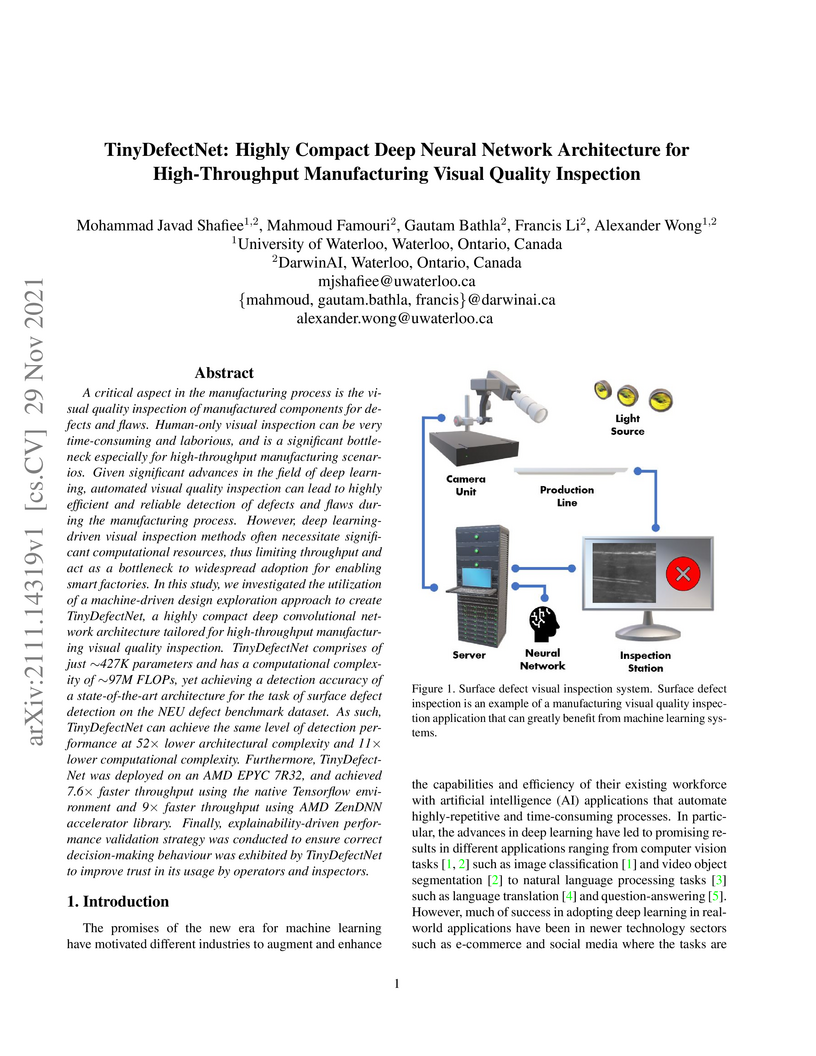
A critical aspect in the manufacturing process is the visual quality inspection of manufactured components for defects and flaws. Human-only visual inspection can be very time-consuming and laborious, and is a significant bottleneck especially for high-throughput manufacturing scenarios. Given significant advances in the field of deep learning, automated visual quality inspection can lead to highly efficient and reliable detection of defects and flaws during the manufacturing process. However, deep learning-driven visual inspection methods often necessitate significant computational resources, thus limiting throughput and act as a bottleneck to widespread adoption for enabling smart factories. In this study, we investigated the utilization of a machine-driven design exploration approach to create TinyDefectNet, a highly compact deep convolutional network architecture tailored for high-throughput manufacturing visual quality inspection. TinyDefectNet comprises of just ~427K parameters and has a computational complexity of ~97M FLOPs, yet achieving a detection accuracy of a state-of-the-art architecture for the task of surface defect detection on the NEU defect benchmark dataset. As such, TinyDefectNet can achieve the same level of detection performance at 52 lower architectural complexity and 11x lower computational complexity. Furthermore, TinyDefectNet was deployed on an AMD EPYC 7R32, and achieved 7.6x faster throughput using the native Tensorflow environment and 9x faster throughput using AMD ZenDNN accelerator library. Finally, explainability-driven performance validation strategy was conducted to ensure correct decision-making behaviour was exhibited by TinyDefectNet to improve trust in its usage by operators and inspectors.
26 Aug 2018
Much of the focus in the design of deep neural networks has been on improving
accuracy, leading to more powerful yet highly complex network architectures
that are difficult to deploy in practical scenarios, particularly on edge
devices such as mobile and other consumer devices given their high
computational and memory requirements. As a result, there has been a recent
interest in the design of quantitative metrics for evaluating deep neural
networks that accounts for more than just model accuracy as the sole indicator
of network performance. In this study, we continue the conversation towards
universal metrics for evaluating the performance of deep neural networks for
practical on-device edge usage. In particular, we propose a new balanced metric
called NetScore, which is designed specifically to provide a quantitative
assessment of the balance between accuracy, computational complexity, and
network architecture complexity of a deep neural network, which is important
for on-device edge operation. In what is one of the largest comparative
analysis between deep neural networks in literature, the NetScore metric, the
top-1 accuracy metric, and the popular information density metric were compared
across a diverse set of 60 different deep convolutional neural networks for
image classification on the ImageNet Large Scale Visual Recognition Challenge
(ILSVRC 2012) dataset. The evaluation results across these three metrics for
this diverse set of networks are presented in this study to act as a reference
guide for practitioners in the field. The proposed NetScore metric, along with
the other tested metrics, are by no means perfect, but the hope is to push the
conversation towards better universal metrics for evaluating deep neural
networks for use in practical on-device edge scenarios to help guide
practitioners in model design for such scenarios.
There are no more papers matching your filters at the moment.
