Ask or search anything...
Budgeted Reinforcement Learning in Continuous State Space
 Microsoft
Microsoft Inria
InriaA Budgeted Markov Decision Process (BMDP) is an extension of a Markov
Decision Process to critical applications requiring safety constraints. It
relies on a notion of risk implemented in the shape of a cost signal
constrained to lie below an - adjustable - threshold. So far, BMDPs could only
be solved in the case of finite state spaces with known dynamics. This work
extends the state-of-the-art to continuous spaces environments and unknown
dynamics. We show that the solution to a BMDP is a fixed point of a novel
Budgeted Bellman Optimality operator. This observation allows us to introduce
natural extensions of Deep Reinforcement Learning algorithms to address
large-scale BMDPs. We validate our approach on two simulated applications:
spoken dialogue and autonomous driving.
Practical Open-Loop Optimistic Planning
09 Apr 2019
We consider the problem of online planning in a Markov Decision Process when given only access to a generative model, restricted to open-loop policies - i.e. sequences of actions - and under budget constraint. In this setting, the Open-Loop Optimistic Planning (OLOP) algorithm enjoys good theoretical guarantees but is overly conservative in practice, as we show in numerical experiments. We propose a modified version of the algorithm with tighter upper-confidence bounds, KLOLOP, that leads to better practical performances while retaining the sample complexity bound. Finally, we propose an efficient implementation that significantly improves the time complexity of both algorithms.
Behavior Trees in Functional Safety Supervisors for Autonomous Vehicles
03 Oct 2024
This work introduces a systematic methodology for creating real-time functional safety supervisors for autonomous vehicles by converting static safety analyses, such as Fault Tree Analysis and Hazard Analysis and Risk Assessment, into dynamic Behavior Tree structures. The approach, tested on a real vehicle, achieved an average of 94% accuracy in fault identification during falsification tests and successfully triggered safe states.
View blog
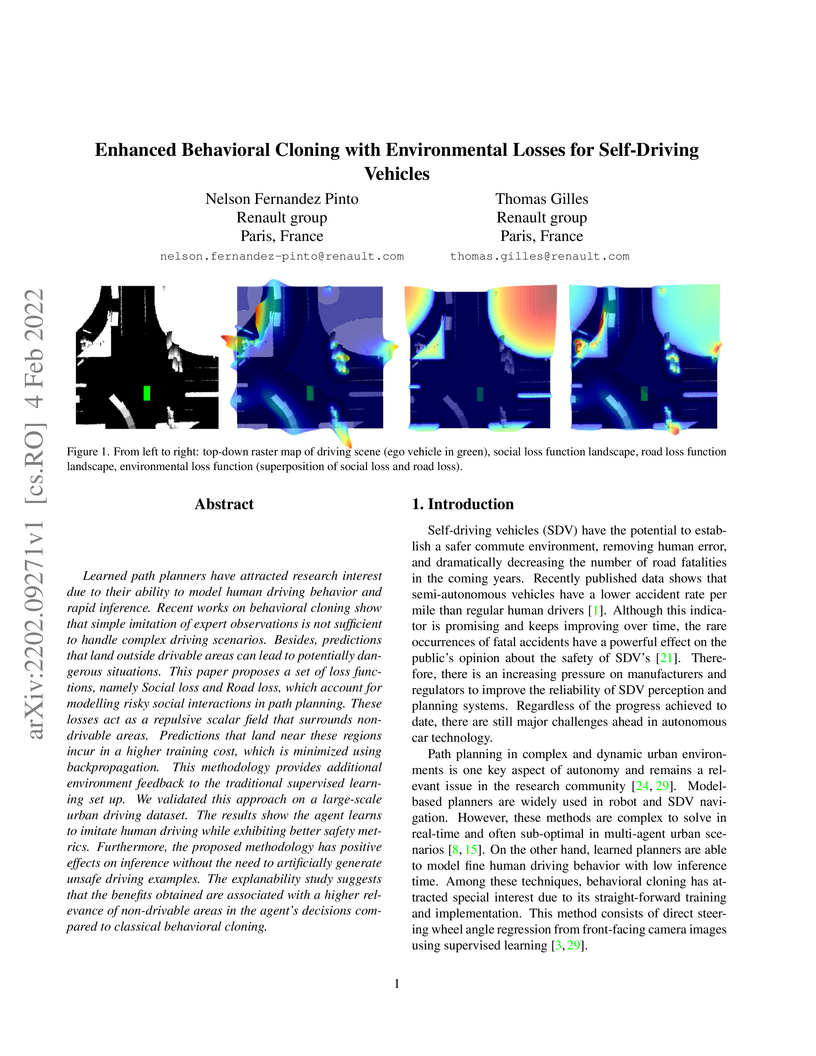
Enhanced Behavioral Cloning with Environmental Losses for Self-Driving Vehicles
04 Feb 2022
Learned path planners have attracted research interest due to their ability to model human driving behavior and rapid inference. Recent works on behavioral cloning show that simple imitation of expert observations is not sufficient to handle complex driving scenarios. Besides, predictions that land outside drivable areas can lead to potentially dangerous situations. This paper proposes a set of loss functions, namely Social loss and Road loss, which account for modelling risky social interactions in path planning. These losses act as a repulsive scalar field that surrounds non-drivable areas. Predictions that land near these regions incur in a higher training cost, which is minimized using backpropagation. This methodology provides additional environment feedback to the traditional supervised learning set up. We validated this approach on a large-scale urban driving dataset. The results show the agent learns to imitate human driving while exhibiting better safety metrics. Furthermore, the proposed methodology has positive effects on inference without the need to artificially generate unsafe driving examples. The explanability study suggests that the benefits obtained are associated with a higher relevance of non-drivable areas in the agent's decisions compared to classical behavioral cloning.
There are no more papers matching your filters at the moment.