10 May 2022
Humans excel at continually learning from an ever-changing environment whereas it remains a challenge for deep neural networks which exhibit catastrophic forgetting. The complementary learning system (CLS) theory suggests that the interplay between rapid instance-based learning and slow structured learning in the brain is crucial for accumulating and retaining knowledge. Here, we propose CLS-ER, a novel dual memory experience replay (ER) method which maintains short-term and long-term semantic memories that interact with the episodic memory. Our method employs an effective replay mechanism whereby new knowledge is acquired while aligning the decision boundaries with the semantic memories. CLS-ER does not utilize the task boundaries or make any assumption about the distribution of the data which makes it versatile and suited for "general continual learning". Our approach achieves state-of-the-art performance on standard benchmarks as well as more realistic general continual learning settings.
15 May 2023
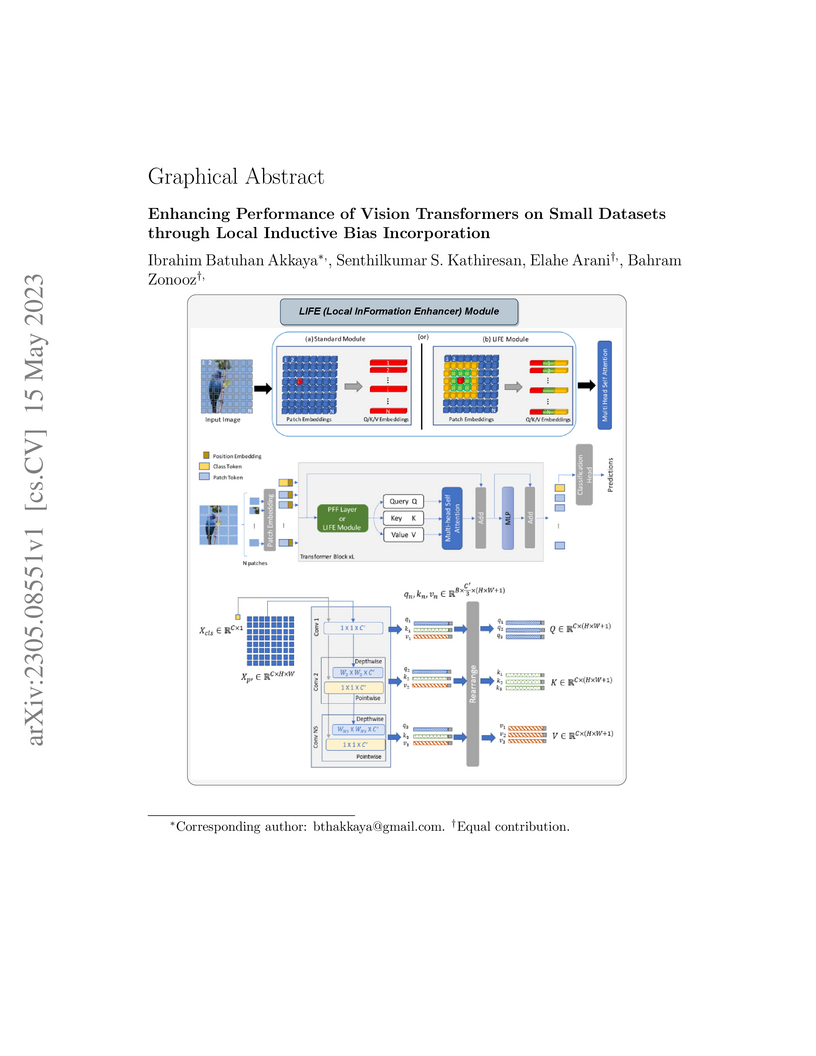
Vision transformers (ViTs) achieve remarkable performance on large datasets, but tend to perform worse than convolutional neural networks (CNNs) when trained from scratch on smaller datasets, possibly due to a lack of local inductive bias in the architecture. Recent studies have therefore added locality to the architecture and demonstrated that it can help ViTs achieve performance comparable to CNNs in the small-size dataset regime. Existing methods, however, are architecture-specific or have higher computational and memory costs. Thus, we propose a module called Local InFormation Enhancer (LIFE) that extracts patch-level local information and incorporates it into the embeddings used in the self-attention block of ViTs. Our proposed module is memory and computation efficient, as well as flexible enough to process auxiliary tokens such as the classification and distillation tokens. Empirical results show that the addition of the LIFE module improves the performance of ViTs on small image classification datasets. We further demonstrate how the effect can be extended to downstream tasks, such as object detection and semantic segmentation. In addition, we introduce a new visualization method, Dense Attention Roll-Out, specifically designed for dense prediction tasks, allowing the generation of class-specific attention maps utilizing the attention maps of all tokens.
08 May 2023
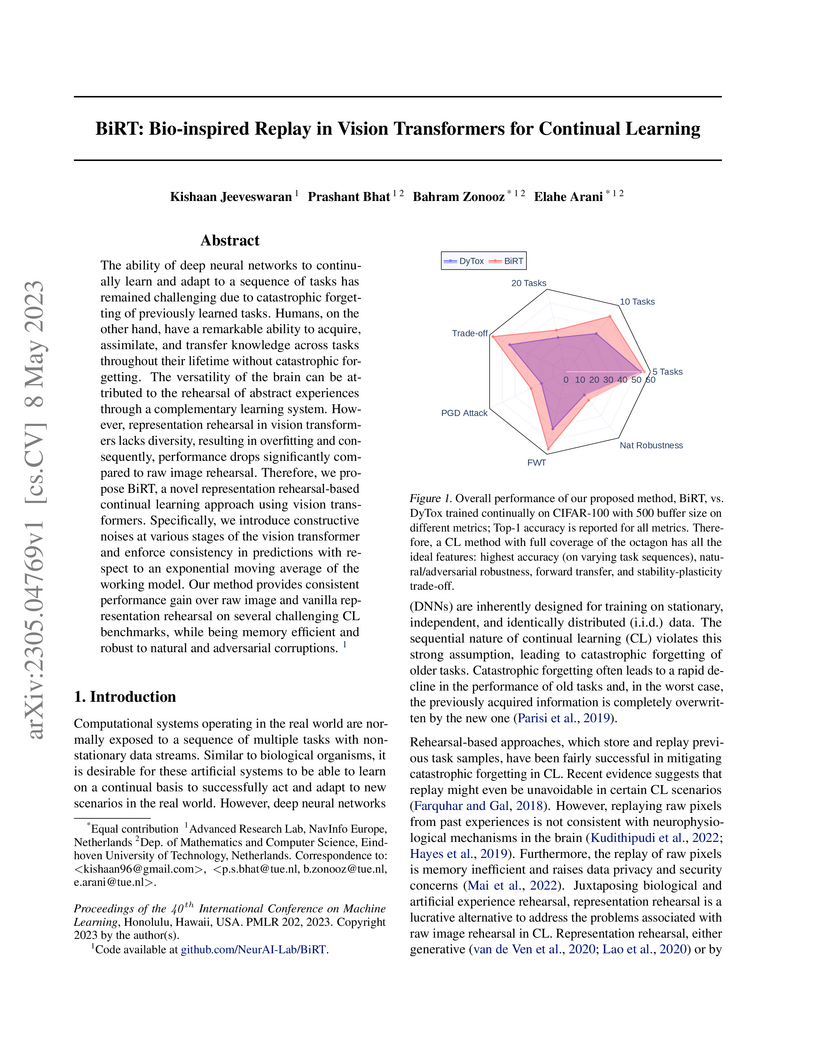
The ability of deep neural networks to continually learn and adapt to a sequence of tasks has remained challenging due to catastrophic forgetting of previously learned tasks. Humans, on the other hand, have a remarkable ability to acquire, assimilate, and transfer knowledge across tasks throughout their lifetime without catastrophic forgetting. The versatility of the brain can be attributed to the rehearsal of abstract experiences through a complementary learning system. However, representation rehearsal in vision transformers lacks diversity, resulting in overfitting and consequently, performance drops significantly compared to raw image rehearsal. Therefore, we propose BiRT, a novel representation rehearsal-based continual learning approach using vision transformers. Specifically, we introduce constructive noises at various stages of the vision transformer and enforce consistency in predictions with respect to an exponential moving average of the working model. Our method provides consistent performance gain over raw image and vanilla representation rehearsal on several challenging CL benchmarks, while being memory efficient and robust to natural and adversarial corruptions.

07 Feb 2022
The advent of autonomous driving and advanced driver assistance systems necessitates continuous developments in computer vision for 3D scene understanding. Self-supervised monocular depth estimation, a method for pixel-wise distance estimation of objects from a single camera without the use of ground truth labels, is an important task in 3D scene understanding. However, existing methods for this task are limited to convolutional neural network (CNN) architectures. In contrast with CNNs that use localized linear operations and lose feature resolution across the layers, vision transformers process at constant resolution with a global receptive field at every stage. While recent works have compared transformers against their CNN counterparts for tasks such as image classification, no study exists that investigates the impact of using transformers for self-supervised monocular depth estimation. Here, we first demonstrate how to adapt vision transformers for self-supervised monocular depth estimation. Thereafter, we compare the transformer and CNN-based architectures for their performance on KITTI depth prediction benchmarks, as well as their robustness to natural corruptions and adversarial attacks, including when the camera intrinsics are unknown. Our study demonstrates how transformer-based architecture, though lower in run-time efficiency, achieves comparable performance while being more robust and generalizable.

14 Feb 2023
Deep neural network based object detectors are continuously evolving and are
used in a multitude of applications, each having its own set of requirements.
While safety-critical applications need high accuracy and reliability,
low-latency tasks need resource and energy-efficient networks. Real-time
detectors, which are a necessity in high-impact real-world applications, are
continuously proposed, but they overemphasize the improvements in accuracy and
speed while other capabilities such as versatility, robustness, resource and
energy efficiency are omitted. A reference benchmark for existing networks does
not exist, nor does a standard evaluation guideline for designing new networks,
which results in ambiguous and inconsistent comparisons. We, thus, conduct a
comprehensive study on multiple real-time detectors (anchor-, keypoint-, and
transformer-based) on a wide range of datasets and report results on an
extensive set of metrics. We also study the impact of variables such as image
size, anchor dimensions, confidence thresholds, and architecture layers on the
overall performance. We analyze the robustness of detection networks against
distribution shifts, natural corruptions, and adversarial attacks. Also, we
provide a calibration analysis to gauge the reliability of the predictions.
Finally, to highlight the real-world impact, we conduct two unique case
studies, on autonomous driving and healthcare applications. To further gauge
the capability of networks in critical real-time applications, we report the
performance after deploying the detection networks on edge devices. Our
extensive empirical study can act as a guideline for the industrial community
to make an informed choice on the existing networks. We also hope to inspire
the research community towards a new direction in the design and evaluation of
networks that focuses on a bigger and holistic overview for a far-reaching
impact.

06 May 2021
From computer vision and speech recognition to forecasting trajectories in autonomous vehicles, deep learning approaches are at the forefront of so many domains. Deep learning models are developed using plethora of high-level, generic frameworks and libraries. Running those models on the mobile devices require hardware-aware optimizations and in most cases converting the models to other formats or using a third-party framework. In reality, most of the developed models need to undergo a process of conversion, adaptation, and, in some cases, full retraining to match the requirements and features of the framework that is deploying the model on the target platform. Variety of hardware platforms with heterogeneous computing elements, from wearable devices to high-performance GPU clusters are used to run deep learning models. In this paper, we present the existing challenges, obstacles, and practical solutions towards deploying deep learning models on mobile devices.

02 Jan 2023
Real-world applications often require learning continuously from a stream of data under ever-changing conditions. When trying to learn from such non-stationary data, deep neural networks (DNNs) undergo catastrophic forgetting of previously learned information. Among the common approaches to avoid catastrophic forgetting, rehearsal-based methods have proven effective. However, they are still prone to forgetting due to task-interference as all parameters respond to all tasks. To counter this, we take inspiration from sparse coding in the brain and introduce dynamic modularity and sparsity (Dynamos) for rehearsal-based general continual learning. In this setup, the DNN learns to respond to stimuli by activating relevant subsets of neurons. We demonstrate the effectiveness of Dynamos on multiple datasets under challenging continual learning evaluation protocols. Finally, we show that our method learns representations that are modular and specialized, while maintaining reusability by activating subsets of neurons with overlaps corresponding to the similarity of stimuli.
11 Jul 2022
Deep neural networks struggle to continually learn multiple sequential tasks due to catastrophic forgetting of previously learned tasks. Rehearsal-based methods which explicitly store previous task samples in the buffer and interleave them with the current task samples have proven to be the most effective in mitigating forgetting. However, Experience Replay (ER) does not perform well under low-buffer regimes and longer task sequences as its performance is commensurate with the buffer size. Consistency in predictions of soft-targets can assist ER in preserving information pertaining to previous tasks better as soft-targets capture the rich similarity structure of the data. Therefore, we examine the role of consistency regularization in ER framework under various continual learning scenarios. We also propose to cast consistency regularization as a self-supervised pretext task thereby enabling the use of a wide variety of self-supervised learning methods as regularizers. While simultaneously enhancing model calibration and robustness to natural corruptions, regularizing consistency in predictions results in lesser forgetting across all continual learning scenarios. Among the different families of regularizers, we find that stricter consistency constraints preserve previous task information in ER better.
17 Oct 2023
Artificial neural networks (ANNs) exhibit a narrow scope of expertise on stationary independent data. However, the data in the real world is continuous and dynamic, and ANNs must adapt to novel scenarios while also retaining the learned knowledge to become lifelong learners. The ability of humans to excel at these tasks can be attributed to multiple factors ranging from cognitive computational structures, cognitive biases, and the multi-memory systems in the brain. We incorporate key concepts from each of these to design a novel framework, Dual Cognitive Architecture (DUCA), which includes multiple sub-systems, implicit and explicit knowledge representation dichotomy, inductive bias, and a multi-memory system. The inductive bias learner within DUCA is instrumental in encoding shape information, effectively countering the tendency of ANNs to learn local textures. Simultaneously, the inclusion of a semantic memory submodule facilitates the gradual consolidation of knowledge, replicating the dynamics observed in fast and slow learning systems, reminiscent of the principles underpinning the complementary learning system in human cognition. DUCA shows improvement across different settings and datasets, and it also exhibits reduced task recency bias, without the need for extra information. To further test the versatility of lifelong learning methods on a challenging distribution shift, we introduce a novel domain-incremental dataset DN4IL. In addition to improving performance on existing benchmarks, DUCA also demonstrates superior performance on this complex dataset.

07 Oct 2022
Road infrastructure maintenance inspection is typically a labor-intensive and critical task to ensure the safety of all road users. Existing state-of-the-art techniques in Artificial Intelligence (AI) for object detection and segmentation help automate a huge chunk of this task given adequate annotated data. However, annotating videos from scratch is cost-prohibitive. For instance, it can take an annotator several days to annotate a 5-minute video recorded at 30 FPS. Hence, we propose an automated labelling pipeline by leveraging techniques like few-shot learning and out-of-distribution detection to generate labels for road damage detection. In addition, our pipeline includes a risk factor assessment for each damage by instance quantification to prioritize locations for repairs which can lead to optimal deployment of road maintenance machinery. We show that the AI models trained with these techniques can not only generalize better to unseen real-world data with reduced requirement for human annotation but also provide an estimate of maintenance urgency, thereby leading to safer roads.

14 Feb 2023
Humans excel at lifelong learning, as the brain has evolved to be robust to
distribution shifts and noise in our ever-changing environment. Deep neural
networks (DNNs), however, exhibit catastrophic forgetting and the learned
representations drift drastically as they encounter a new task. This alludes to
a different error-based learning mechanism in the brain. Unlike DNNs, where
learning scales linearly with the magnitude of the error, the sensitivity to
errors in the brain decreases as a function of their magnitude. To this end, we
propose \textit{ESMER} which employs a principled mechanism to modulate error
sensitivity in a dual-memory rehearsal-based system. Concretely, it maintains a
memory of past errors and uses it to modify the learning dynamics so that the
model learns more from small consistent errors compared to large sudden errors.
We also propose \textit{Error-Sensitive Reservoir Sampling} to maintain
episodic memory, which leverages the error history to pre-select low-loss
samples as candidates for the buffer, which are better suited for retaining
information. Empirical results show that ESMER effectively reduces forgetting
and abrupt drift in representations at the task boundary by gradually adapting
to the new task while consolidating knowledge. Remarkably, it also enables the
model to learn under high levels of label noise, which is ubiquitous in
real-world data streams.
13 Apr 2023
Humans excel at continually acquiring, consolidating, and retaining
information from an ever-changing environment, whereas artificial neural
networks (ANNs) exhibit catastrophic forgetting. There are considerable
differences in the complexity of synapses, the processing of information, and
the learning mechanisms in biological neural networks and their artificial
counterparts, which may explain the mismatch in performance. We consider a
biologically plausible framework that constitutes separate populations of
exclusively excitatory and inhibitory neurons that adhere to Dale's principle,
and the excitatory pyramidal neurons are augmented with dendritic-like
structures for context-dependent processing of stimuli. We then conduct a
comprehensive study on the role and interactions of different mechanisms
inspired by the brain, including sparse non-overlapping representations,
Hebbian learning, synaptic consolidation, and replay of past activations that
accompanied the learning event. Our study suggests that the employing of
multiple complementary mechanisms in a biologically plausible architecture,
similar to the brain, may be effective in enabling continual learning in ANNs.

30 Jun 2021
Transformers provide promising accuracy and have become popular and used in various domains such as natural language processing and computer vision. However, due to their massive number of model parameters, memory and computation requirements, they are not suitable for resource-constrained low-power devices. Even with high-performance and specialized devices, the memory bandwidth can become a performance-limiting bottleneck. In this paper, we present a performance analysis of state-of-the-art vision transformers on several devices. We propose to reduce the overall memory footprint and memory transfers by clustering the model parameters. We show that by using only 64 clusters to represent model parameters, it is possible to reduce the data transfer from the main memory by more than 4x, achieve up to 22% speedup and 39% energy savings on mobile devices with less than 0.1% accuracy loss.
13 Apr 2023
Few-shot learning (FSL) techniques seek to learn the underlying patterns in data using fewer samples, analogous to how humans learn from limited experience. In this limited-data scenario, the challenges associated with deep neural networks, such as shortcut learning and texture bias behaviors, are further exacerbated. Moreover, the significance of addressing shortcut learning is not yet fully explored in the few-shot setup. To address these issues, we propose LSFSL, which enforces the model to learn more generalizable features utilizing the implicit prior information present in the data. Through comprehensive analyses, we demonstrate that LSFSL-trained models are less vulnerable to alteration in color schemes, statistical correlations, and adversarial perturbations leveraging the global semantics in the data. Our findings highlight the potential of incorporating relevant priors in few-shot approaches to increase robustness and generalization.
18 Aug 2020
Adversarial training has been proven to be an effective technique for
improving the adversarial robustness of models. However, there seems to be an
inherent trade-off between optimizing the model for accuracy and robustness. To
this end, we propose Adversarial Concurrent Training (ACT), which employs
adversarial training in a collaborative learning framework whereby we train a
robust model in conjunction with a natural model in a minimax game. ACT
encourages the two models to align their feature space by using the
task-specific decision boundaries and explore the input space more broadly.
Furthermore, the natural model acts as a regularizer, enforcing priors on
features that the robust model should learn. Our analyses on the behavior of
the models show that ACT leads to a robust model with lower model complexity,
higher information compression in the learned representations, and high
posterior entropy solutions indicative of convergence to a flatter minima. We
demonstrate the effectiveness of the proposed approach across different
datasets and network architectures. On ImageNet, ACT achieves 68.20% standard
accuracy and 44.29% robustness accuracy under a 100-iteration untargeted
attack, improving upon the standard adversarial training method's 65.70%
standard accuracy and 42.36% robustness.

13 Jul 2022
Continual learning (CL) over non-stationary data streams remains one of the long-standing challenges in deep neural networks (DNNs) as they are prone to catastrophic forgetting. CL models can benefit from self-supervised pre-training as it enables learning more generalizable task-agnostic features. However, the effect of self-supervised pre-training diminishes as the length of task sequences increases. Furthermore, the domain shift between pre-training data distribution and the task distribution reduces the generalizability of the learned representations. To address these limitations, we propose Task Agnostic Representation Consolidation (TARC), a two-stage training paradigm for CL that intertwines task-agnostic and task-specific learning whereby self-supervised training is followed by supervised learning for each task. To further restrict the deviation from the learned representations in the self-supervised stage, we employ a task-agnostic auxiliary loss during the supervised stage. We show that our training paradigm can be easily added to memory- or regularization-based approaches and provides consistent performance gain across more challenging CL settings. We further show that it leads to more robust and well-calibrated models.
20 Apr 2021
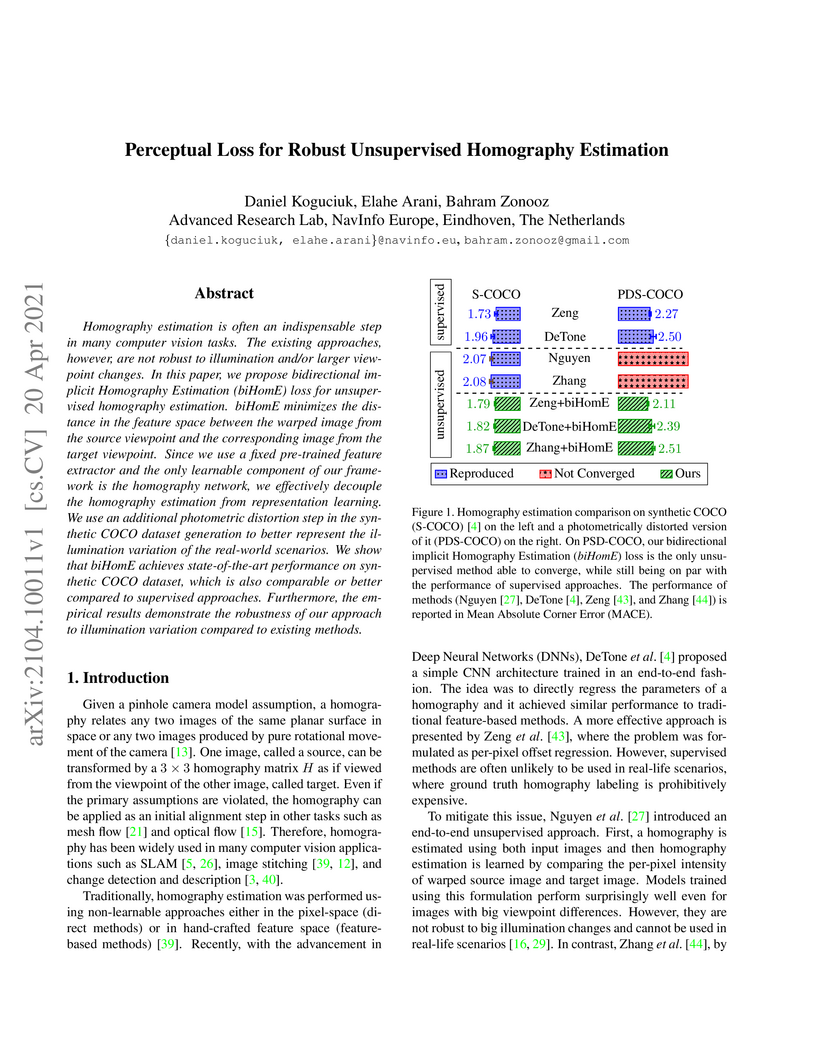
Homography estimation is often an indispensable step in many computer vision
tasks. The existing approaches, however, are not robust to illumination and/or
larger viewpoint changes. In this paper, we propose bidirectional implicit
Homography Estimation (biHomE) loss for unsupervised homography estimation.
biHomE minimizes the distance in the feature space between the warped image
from the source viewpoint and the corresponding image from the target
viewpoint. Since we use a fixed pre-trained feature extractor and the only
learnable component of our framework is the homography network, we effectively
decouple the homography estimation from representation learning. We use an
additional photometric distortion step in the synthetic COCO dataset generation
to better represent the illumination variation of the real-world scenarios. We
show that biHomE achieves state-of-the-art performance on synthetic COCO
dataset, which is also comparable or better compared to supervised approaches.
Furthermore, the empirical results demonstrate the robustness of our approach
to illumination variation compared to existing methods.

25 Jul 2020
The ability to efficiently utilize crowdsourced visual data carries immense potential for the domains of large scale dynamic mapping and autonomous driving. However, state-of-the-art methods for crowdsourced 3D mapping assume prior knowledge of camera intrinsics. In this work, we propose a framework that estimates the 3D positions of semantically meaningful landmarks such as traffic signs without assuming known camera intrinsics, using only monocular color camera and GPS. We utilize multi-view geometry as well as deep learning based self-calibration, depth, and ego-motion estimation for traffic sign positioning, and show that combining their strengths is important for increasing the map coverage. To facilitate research on this task, we construct and make available a KITTI based 3D traffic sign ground truth positioning dataset. Using our proposed framework, we achieve an average single-journey relative and absolute positioning accuracy of 39cm and 1.26m respectively, on this dataset.

04 Jun 2021
Road infrastructure maintenance inspection is typically a labour-intensive and critical task to ensure the safety of all the road users. In this work, we propose a detailed methodology to use state-of-the-art techniques in artificial intelligence and computer vision to automate a sizeable portion of the maintenance inspection subtasks and reduce the labour costs. The proposed methodology uses state-of-the-art computer vision techniques such as object detection and semantic segmentation to automate inspections on primary road structures such as the road surface, markings, barriers (guardrails) and traffic signs. The models are mostly trained on commercially viable datasets and augmented with proprietary data. We demonstrate that our AI models can not only automate and scale maintenance inspections on primary road structures but also result in higher recall compared to traditional manual inspections.
12 Aug 2022
Scene understanding is crucial for autonomous systems which intend to operate
in the real world. Single task vision networks extract information only based
on some aspects of the scene. In multi-task learning (MTL), on the other hand,
these single tasks are jointly learned, thereby providing an opportunity for
tasks to share information and obtain a more comprehensive understanding. To
this end, we develop UniNet, a unified scene understanding network that
accurately and efficiently infers vital vision tasks including object
detection, semantic segmentation, instance segmentation, monocular depth
estimation, and monocular instance depth prediction. As these tasks look at
different semantic and geometric information, they can either complement or
conflict with each other. Therefore, understanding inter-task relationships can
provide useful cues to enable complementary information sharing. We evaluate
the task relationships in UniNet through the lens of adversarial attacks based
on the notion that they can exploit learned biases and task interactions in the
neural network. Extensive experiments on the Cityscapes dataset, using
untargeted and targeted attacks reveal that semantic tasks strongly interact
amongst themselves, and the same holds for geometric tasks. Additionally, we
show that the relationship between semantic and geometric tasks is asymmetric
and their interaction becomes weaker as we move towards higher-level
representations.
There are no more papers matching your filters at the moment.
