Ask or search anything...
LSVL: Large-scale season-invariant visual localization for UAVs
07 Dec 2022
 Aalto University
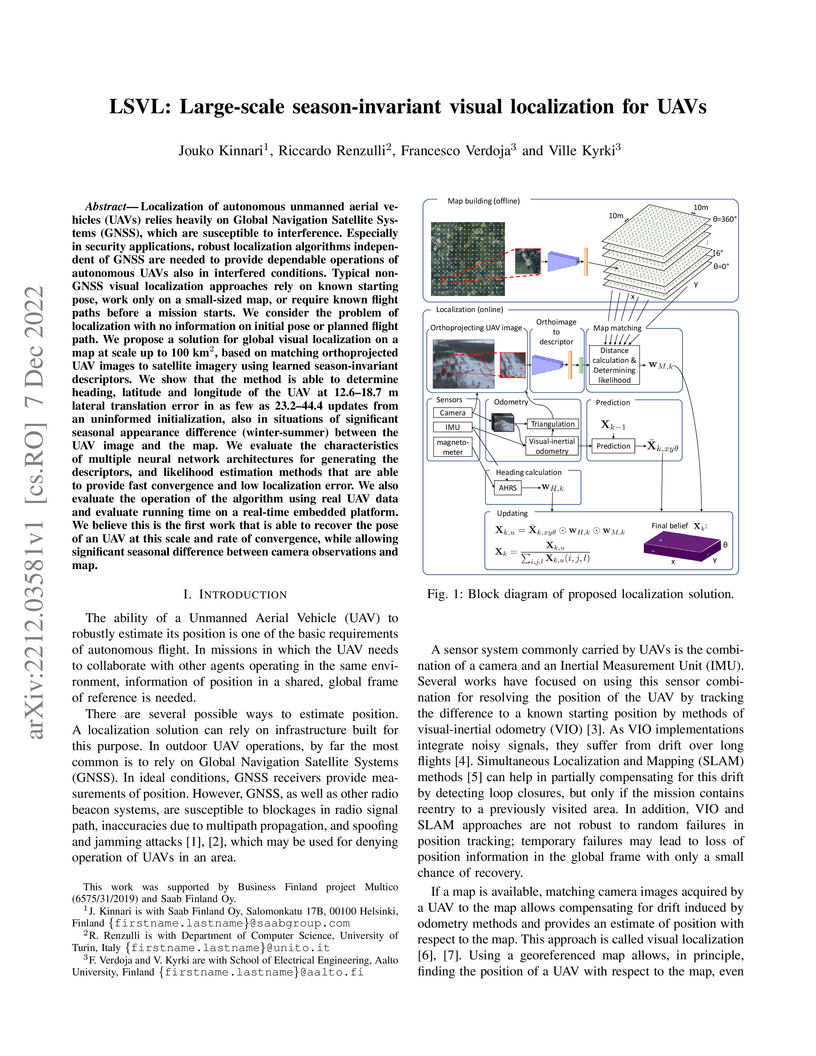
Aalto UniversityLocalization of autonomous unmanned aerial vehicles (UAVs) relies heavily on Global Navigation Satellite Systems (GNSS), which are susceptible to interference. Especially in security applications, robust localization algorithms independent of GNSS are needed to provide dependable operations of autonomous UAVs also in interfered conditions. Typical non-GNSS visual localization approaches rely on known starting pose, work only on a small-sized map, or require known flight paths before a mission starts. We consider the problem of localization with no information on initial pose or planned flight path. We propose a solution for global visual localization on a map at scale up to 100 km2, based on matching orthoprojected UAV images to satellite imagery using learned season-invariant descriptors. We show that the method is able to determine heading, latitude and longitude of the UAV at 12.6-18.7 m lateral translation error in as few as 23.2-44.4 updates from an uninformed initialization, also in situations of significant seasonal appearance difference (winter-summer) between the UAV image and the map. We evaluate the characteristics of multiple neural network architectures for generating the descriptors, and likelihood estimation methods that are able to provide fast convergence and low localization error. We also evaluate the operation of the algorithm using real UAV data and evaluate running time on a real-time embedded platform. We believe this is the first work that is able to recover the pose of an UAV at this scale and rate of convergence, while allowing significant seasonal difference between camera observations and map.
Periodic Activation Functions Induce Stationarity
20 Dec 2021
Neural network models are known to reinforce hidden data biases, making them unreliable and difficult to interpret. We seek to build models that `know what they do not know' by introducing inductive biases in the function space. We show that periodic activation functions in Bayesian neural networks establish a connection between the prior on the network weights and translation-invariant, stationary Gaussian process priors. Furthermore, we show that this link goes beyond sinusoidal (Fourier) activations by also covering triangular wave and periodic ReLU activation functions. In a series of experiments, we show that periodic activation functions obtain comparable performance for in-domain data and capture sensitivity to perturbed inputs in deep neural networks for out-of-domain detection.

VISTA: Monocular Segmentation-Based Mapping for Appearance and View-Invariant Global Localization
15 Jul 2025
 MIT
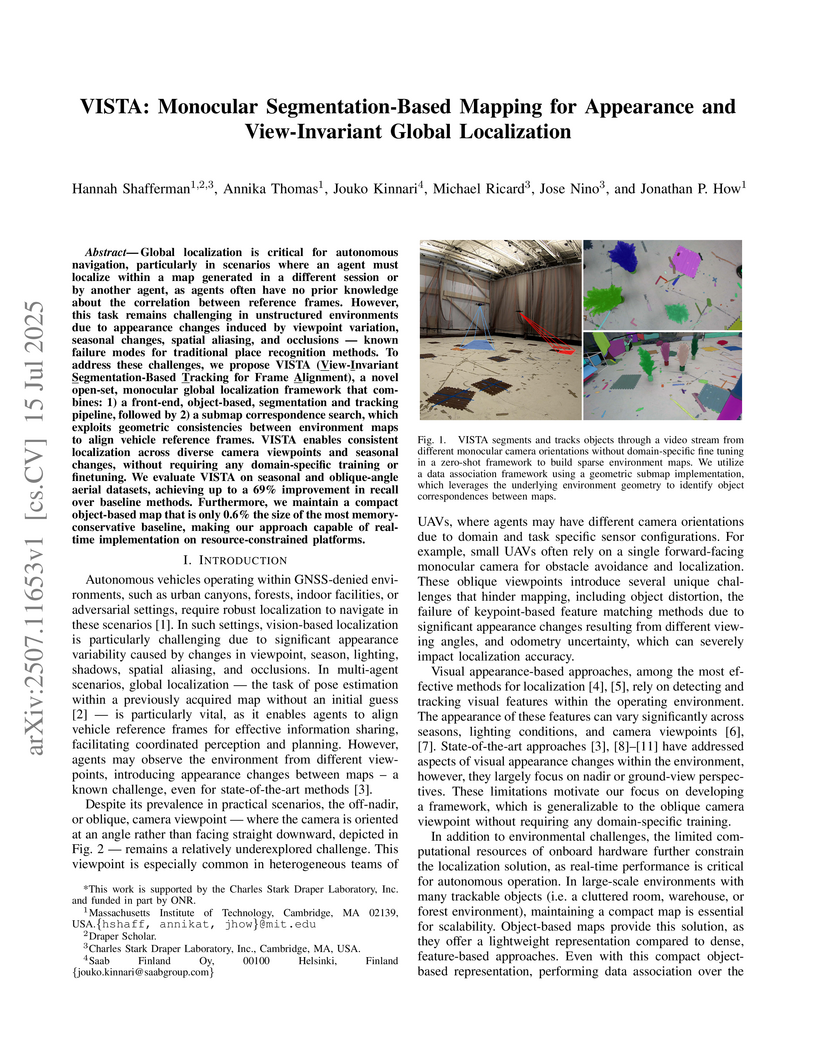
MITGlobal localization is critical for autonomous navigation, particularly in scenarios where an agent must localize within a map generated in a different session or by another agent, as agents often have no prior knowledge about the correlation between reference frames. However, this task remains challenging in unstructured environments due to appearance changes induced by viewpoint variation, seasonal changes, spatial aliasing, and occlusions -- known failure modes for traditional place recognition methods. To address these challenges, we propose VISTA (View-Invariant Segmentation-Based Tracking for Frame Alignment), a novel open-set, monocular global localization framework that combines: 1) a front-end, object-based, segmentation and tracking pipeline, followed by 2) a submap correspondence search, which exploits geometric consistencies between environment maps to align vehicle reference frames. VISTA enables consistent localization across diverse camera viewpoints and seasonal changes, without requiring any domain-specific training or finetuning. We evaluate VISTA on seasonal and oblique-angle aerial datasets, achieving up to a 69% improvement in recall over baseline methods. Furthermore, we maintain a compact object-based map that is only 0.6% the size of the most memory-conservative baseline, making our approach capable of real-time implementation on resource-constrained platforms.
Fixing Overconfidence in Dynamic Neural Networks
08 Dec 2023
 NVIDIA
NVIDIADynamic neural networks are a recent technique that promises a remedy for the
increasing size of modern deep learning models by dynamically adapting their
computational cost to the difficulty of the inputs. In this way, the model can
adjust to a limited computational budget. However, the poor quality of
uncertainty estimates in deep learning models makes it difficult to distinguish
between hard and easy samples. To address this challenge, we present a
computationally efficient approach for post-hoc uncertainty quantification in
dynamic neural networks. We show that adequately quantifying and accounting for
both aleatoric and epistemic uncertainty through a probabilistic treatment of
the last layers improves the predictive performance and aids decision-making
when determining the computational budget. In the experiments, we show
improvements on CIFAR-100, ImageNet, and Caltech-256 in terms of accuracy,
capturing uncertainty, and calibration error.

Stationary Activations for Uncertainty Calibration in Deep Learning
19 Oct 2020
We introduce a new family of non-linear neural network activation functions
that mimic the properties induced by the widely-used Mat\'ern family of kernels
in Gaussian process (GP) models. This class spans a range of locally stationary
models of various degrees of mean-square differentiability. We show an explicit
link to the corresponding GP models in the case that the network consists of
one infinitely wide hidden layer. In the limit of infinite smoothness the
Mat\'ern family results in the RBF kernel, and in this case we recover RBF
activations. Mat\'ern activation functions result in similar appealing
properties to their counterparts in GP models, and we demonstrate that the
local stationarity property together with limited mean-square differentiability
shows both good performance and uncertainty calibration in Bayesian deep
learning tasks. In particular, local stationarity helps calibrate
out-of-distribution (OOD) uncertainty. We demonstrate these properties on
classification and regression benchmarks and a radar emitter classification
task.

Season-invariant GNSS-denied visual localization for UAVs
03 Aug 2022
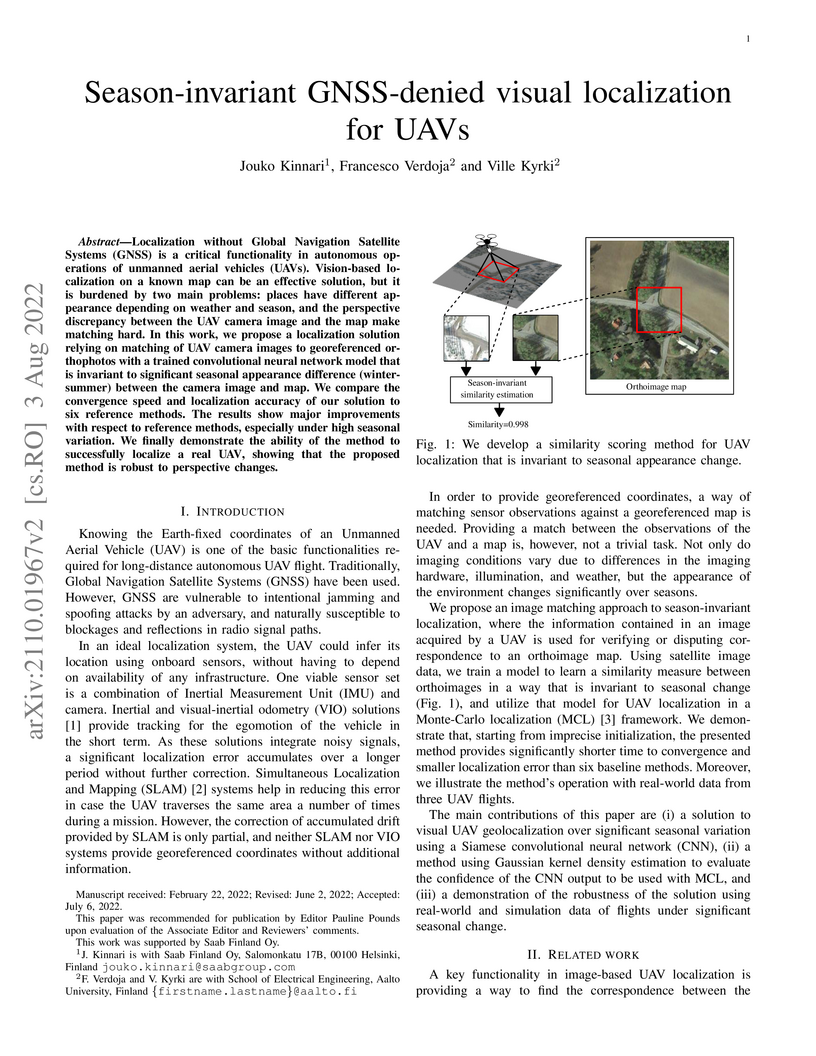
Localization without Global Navigation Satellite Systems (GNSS) is a critical functionality in autonomous operations of unmanned aerial vehicles (UAVs). Vision-based localization on a known map can be an effective solution, but it is burdened by two main problems: places have different appearance depending on weather and season, and the perspective discrepancy between the UAV camera image and the map make matching hard. In this work, we propose a localization solution relying on matching of UAV camera images to georeferenced orthophotos with a trained convolutional neural network model that is invariant to significant seasonal appearance difference (winter-summer) between the camera image and map. We compare the convergence speed and localization accuracy of our solution to six reference methods. The results show major improvements with respect to reference methods, especially under high seasonal variation. We finally demonstrate the ability of the method to successfully localize a real UAV, showing that the proposed method is robust to perspective changes.
SOS-Match: Segmentation for Open-Set Robust Correspondence Search and Robot Localization in Unstructured Environments
26 Nov 2024
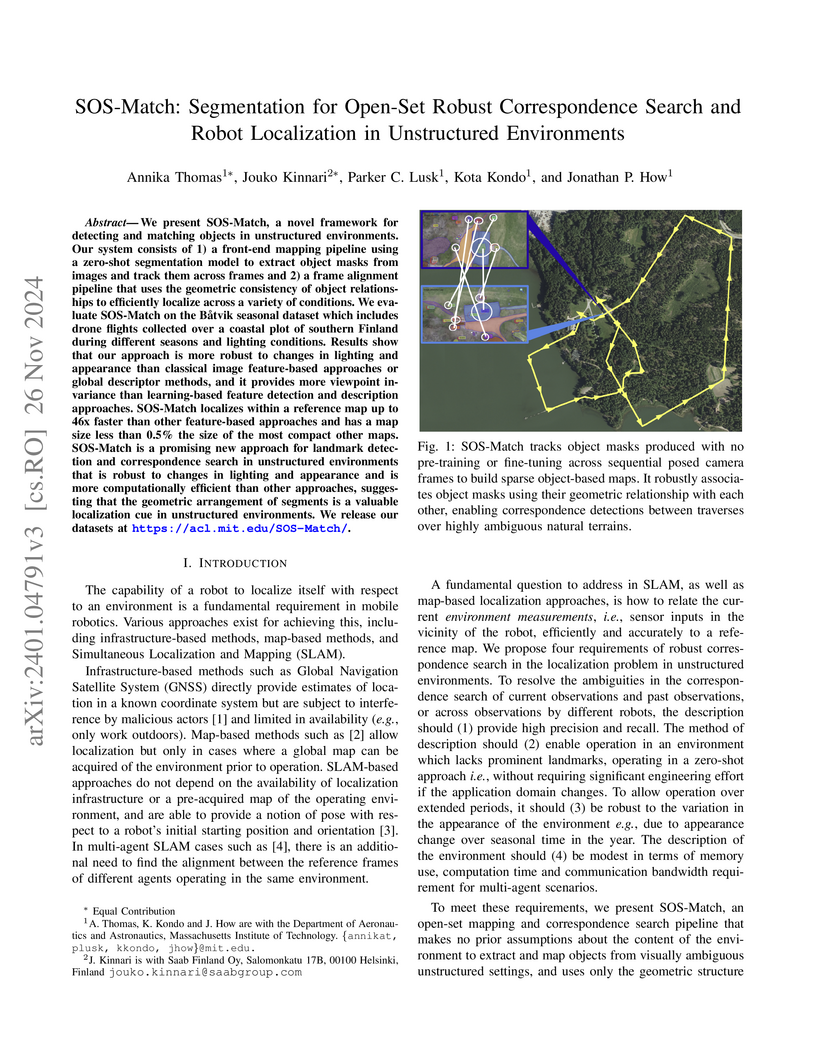
We present SOS-Match, a novel framework for detecting and matching objects in
unstructured environments. Our system consists of 1) a front-end mapping
pipeline using a zero-shot segmentation model to extract object masks from
images and track them across frames and 2) a frame alignment pipeline that uses
the geometric consistency of object relationships to efficiently localize
across a variety of conditions. We evaluate SOS-Match on the Batvik seasonal
dataset which includes drone flights collected over a coastal plot of southern
Finland during different seasons and lighting conditions. Results show that our
approach is more robust to changes in lighting and appearance than classical
image feature-based approaches or global descriptor methods, and it provides
more viewpoint invariance than learning-based feature detection and description
approaches. SOS-Match localizes within a reference map up to 46x faster than
other feature-based approaches and has a map size less than 0.5% the size of
the most compact other maps. SOS-Match is a promising new approach for landmark
detection and correspondence search in unstructured environments that is robust
to changes in lighting and appearance and is more computationally efficient
than other approaches, suggesting that the geometric arrangement of segments is
a valuable localization cue in unstructured environments. We release our
datasets at this https URL
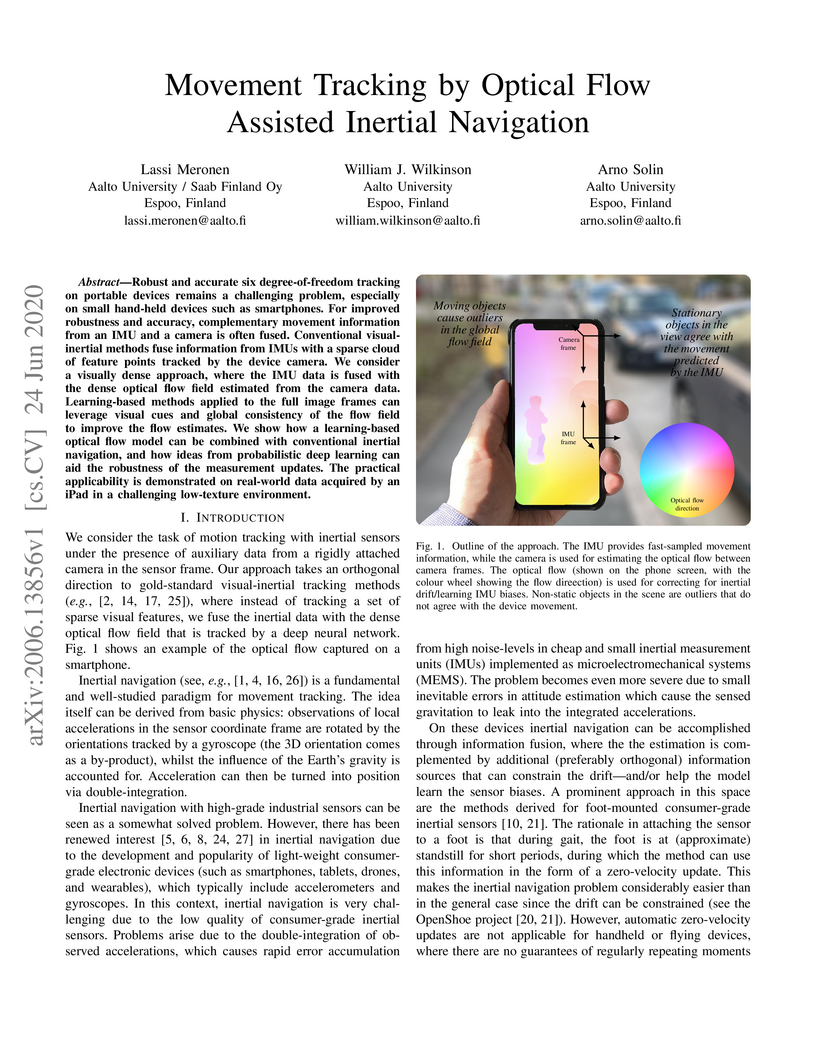
Movement Tracking by Optical Flow Assisted Inertial Navigation
24 Jun 2020
Robust and accurate six degree-of-freedom tracking on portable devices
remains a challenging problem, especially on small hand-held devices such as
smartphones. For improved robustness and accuracy, complementary movement
information from an IMU and a camera is often fused. Conventional
visual-inertial methods fuse information from IMUs with a sparse cloud of
feature points tracked by the device camera. We consider a visually dense
approach, where the IMU data is fused with the dense optical flow field
estimated from the camera data. Learning-based methods applied to the full
image frames can leverage visual cues and global consistency of the flow field
to improve the flow estimates. We show how a learning-based optical flow model
can be combined with conventional inertial navigation, and how ideas from
probabilistic deep learning can aid the robustness of the measurement updates.
The practical applicability is demonstrated on real-world data acquired by an
iPad in a challenging low-texture environment.
There are no more papers matching your filters at the moment.