
19 Aug 2024

CLIP-DPO is a preference optimization method that leverages a pre-trained Vision-Language (VL) embedding model, CLIP, to generate preference data for Direct Preference Optimization (DPO), effectively reducing hallucinations in Large Vision Language Models (LVLMs). This approach eliminates the need for expensive external APIs or additional datasets, achieving significant improvements in hallucination reduction and object grounding on models like LLaVA-1.5 and MobileVLM-v2.
08 May 2025
VladVA, developed by Samsung AI Cambridge, is a discriminative fine-tuning framework that transforms generative Large Vision-Language Models into highly capable discriminative models. This method enables LVLMs to achieve state-of-the-art performance on image-text retrieval benchmarks such as Flickr30k and MS-COCO, and demonstrate advanced compositional understanding on SugarCrepe and Winoground, often outperforming larger, contrastively-trained models.

05 Jun 2025
This paper presents a novel path-planning and task assignment algorithm for
multi-robot systems that should fulfill a global Boolean specification. The
proposed method is based on Integer Linear Programming (ILP) formulations,
which are combined with structural insights from Petri nets to improve
scalability and computational efficiency. By proving that the \emph{constraint
matrix} is totally unimodular (TU) for certain classes of problems, the ILP
formulation can be relaxed into a Linear Programming (LP) problem without
losing the integrality of the solution. This relaxation eliminates complex
combinatorial techniques, significantly reducing computational overhead and
thus ensuring scalability for large-scale systems. Using the approach proposed
in this paper, we can solve path-planning problems for teams made up to 500
robots. The method guarantees computational tractability, handles collision
avoidance and reduces computational demands through iterative LP optimization
techniques. Case studies demonstrate the efficiency of the algorithm in
generating scalable, collision-free paths for large robot teams navigating in
complex environments. While the conservative nature of collision avoidance
introduces additional constraints, and thus, computational requirements, the
solution remains practical and impactful for diverse applications. The
algorithm is particularly applicable to real-world scenarios, including
warehouse logistics where autonomous robots must efficiently coordinate tasks
or search-and-rescue operations in various environments. This work contributes
both theoretically and practically to scalable multi-robot path planning and
task allocation, offering an efficient framework for coordinating autonomous
agents in shared environments.
16 May 2024
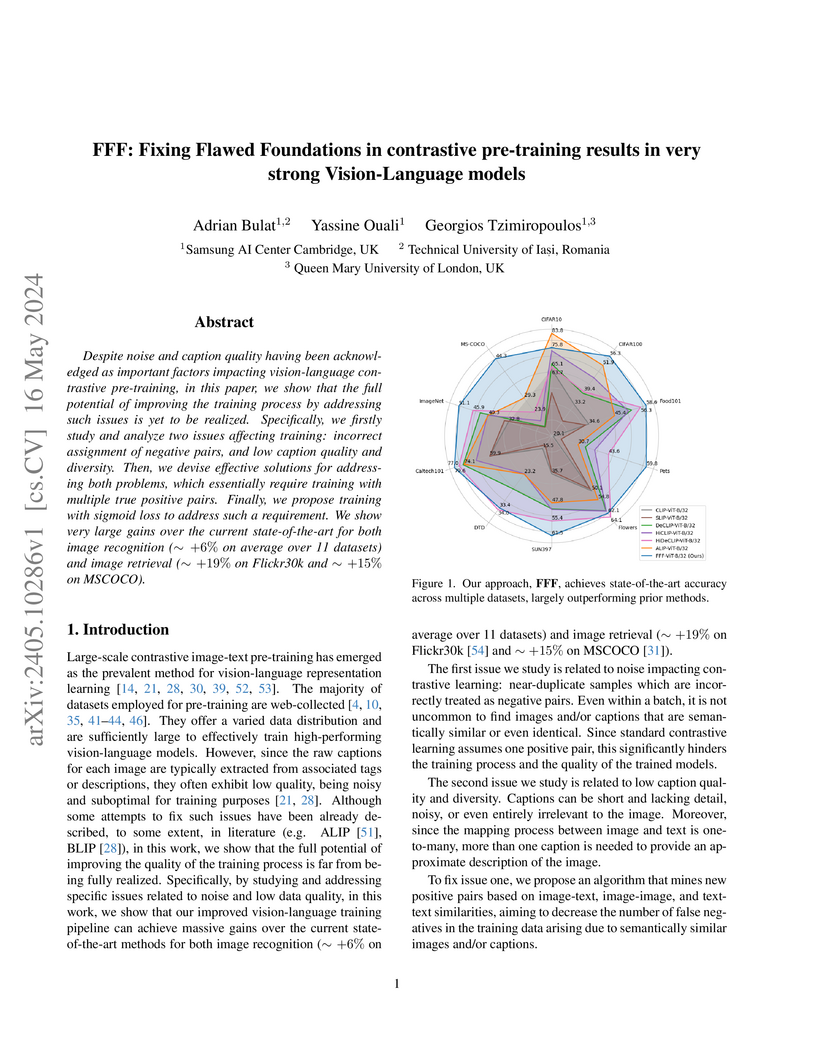
Despite noise and caption quality having been acknowledged as important factors impacting vision-language contrastive pre-training, in this paper, we show that the full potential of improving the training process by addressing such issues is yet to be realized. Specifically, we firstly study and analyze two issues affecting training: incorrect assignment of negative pairs, and low caption quality and diversity. Then, we devise effective solutions for addressing both problems, which essentially require training with multiple true positive pairs. Finally, we propose training with sigmoid loss to address such a requirement. We show very large gains over the current state-of-the-art for both image recognition ( on average over 11 datasets) and image retrieval ( on Flickr30k and on MSCOCO).
15 Jan 2016

We propose that wave propagation through a class of mechanical metamaterials
opens unprecedented avenues in seismic wave protection based on spectral
properties of auxetic-like metamaterials. The elastic parameters of these
metamaterials like the bulk and shear moduli, the mass density, and even the
Poisson ratio, can exhibit negative values in elastic stop bands. We show here
that the propagation of seismic waves with frequencies ranging from 1Hz to 40Hz
can be influenced by a decameter scale version of auxetic-like metamaterials
buried in the soil, with the combined effects of impedance mismatch, local
resonances and Bragg stop bands. More precisely, we numerically examine and
illustrate the markedly different behaviors between the propagation of seismic
waves through a homogeneous isotropic elastic medium (concrete) and an
auxetic-like metamaterial plate consisting of 64 cells (40mx40mx40m), utilized
here as a foundation of a building one would like to protect from seismic site
effects. This novel class of seismic metamaterials opens band gaps at
frequencies compatible with seismic waves when they are designed appropriately,
what makes them interesting candidates for seismic isolation structures.

05 Apr 2024
We study in this paper the improvement of one-class support vector machines
(OC-SVM) through sparse representation techniques for unsupervised anomaly
detection. As Dictionary Learning (DL) became recently a common analysis
technique that reveals hidden sparse patterns of data, our approach uses this
insight to endow unsupervised detection with more control on pattern finding
and dimensions. We introduce a new anomaly detection model that unifies the
OC-SVM and DL residual functions into a single composite objective,
subsequently solved through K-SVD-type iterative algorithms. A closed-form of
the alternating K-SVD iteration is explicitly derived for the new composite
model and practical implementable schemes are discussed. The standard DL model
is adapted for the Dictionary Pair Learning (DPL) context, where the usual
sparsity constraints are naturally eliminated. Finally, we extend both
objectives to the more general setting that allows the use of kernel functions.
The empirical convergence properties of the resulting algorithms are provided
and an in-depth analysis of their parametrization is performed while also
demonstrating their numerical performance in comparison with existing methods.

07 May 2023
It turns out that some empirical facts in Big Data are the effects of properties of large numbers. Zipf's law 'noise' is an example of such an artefact. We expose several properties of the power law distributions and of similar distribution that occur when the population is finite and the rank and counts of elements in the population are natural numbers. We are particularly concerned with the low-rank end of the graph of the law, the potential of noise in the law, and with the approximation of the number of types of objects at various ranks. Approximations instead of exact solutions are the center of attention. Consequences in the interpretation of Zipf's law are discussed.
There are no more papers matching your filters at the moment.
