
08 Dec 2025
Despite impressive advances in agent systems, multi-turn tool-use scenarios remain challenging. It is mainly because intent is clarified progressively and the environment evolves with each tool call. While reusing past experience is natural, current LLM agents either treat entire trajectories or pre-defined subtasks as indivisible units, or solely exploit tool-to-tool dependencies, hindering adaptation as states and information evolve across turns. In this paper, we propose a State Integrated Tool Graph (SIT-Graph), which enhances multi-turn tool use by exploiting partially overlapping experience. Inspired by human decision-making that integrates episodic and procedural memory, SIT-Graph captures both compact state representations (episodic-like fragments) and tool-to-tool dependencies (procedural-like routines) from historical trajectories. Specifically, we first build a tool graph from accumulated tool-use sequences, and then augment each edge with a compact state summary of the dialog and tool history that may shape the next action. At inference time, SIT-Graph enables a human-like balance between episodic recall and procedural execution: when the next decision requires recalling prior context, the agent retrieves the state summaries stored on relevant edges and uses them to guide its next action; when the step is routine, it follows high-confidence tool dependencies without explicit recall. Experiments across multiple stateful multi-turn tool-use benchmarks show that SIT-Graph consistently outperforms strong memory- and graph-based baselines, delivering more robust tool selection and more effective experience transfer.
09 Dec 2025
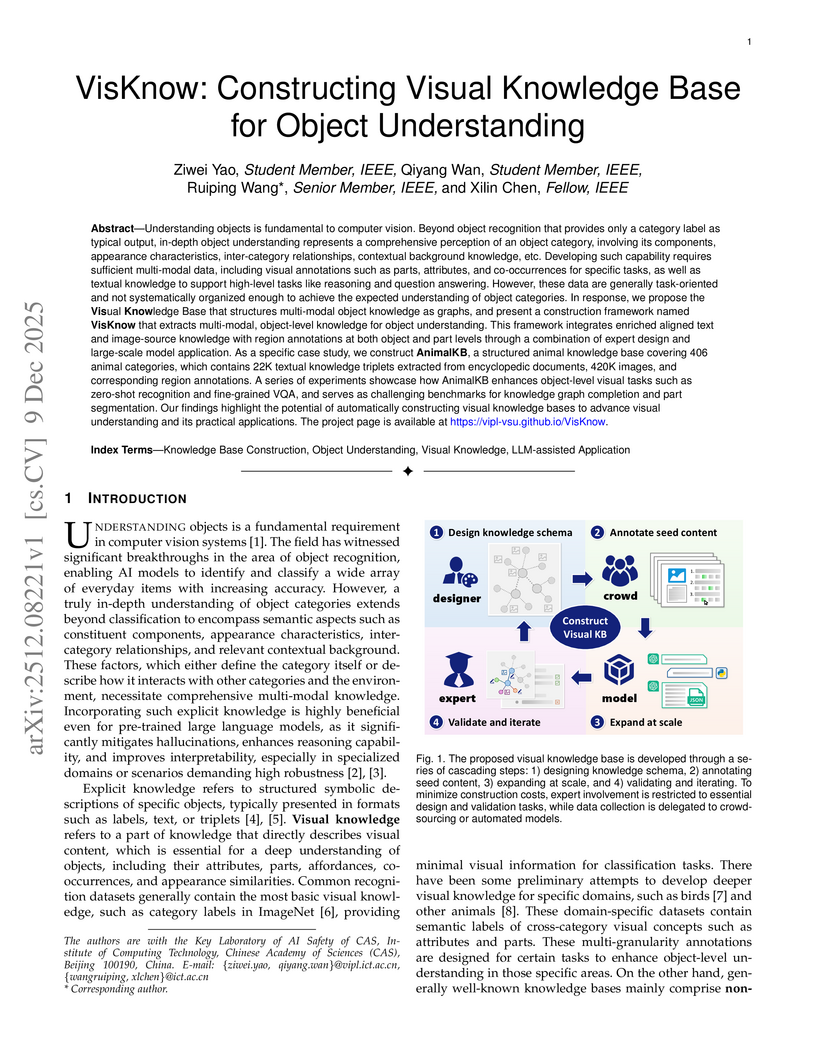
Understanding objects is fundamental to computer vision. Beyond object recognition that provides only a category label as typical output, in-depth object understanding represents a comprehensive perception of an object category, involving its components, appearance characteristics, inter-category relationships, contextual background knowledge, etc. Developing such capability requires sufficient multi-modal data, including visual annotations such as parts, attributes, and co-occurrences for specific tasks, as well as textual knowledge to support high-level tasks like reasoning and question answering. However, these data are generally task-oriented and not systematically organized enough to achieve the expected understanding of object categories. In response, we propose the Visual Knowledge Base that structures multi-modal object knowledge as graphs, and present a construction framework named VisKnow that extracts multi-modal, object-level knowledge for object understanding. This framework integrates enriched aligned text and image-source knowledge with region annotations at both object and part levels through a combination of expert design and large-scale model application. As a specific case study, we construct AnimalKB, a structured animal knowledge base covering 406 animal categories, which contains 22K textual knowledge triplets extracted from encyclopedic documents, 420K images, and corresponding region annotations. A series of experiments showcase how AnimalKB enhances object-level visual tasks such as zero-shot recognition and fine-grained VQA, and serves as challenging benchmarks for knowledge graph completion and part segmentation. Our findings highlight the potential of automatically constructing visual knowledge bases to advance visual understanding and its practical applications. The project page is available at this https URL.
09 Dec 2025
Recent advances in Large Language Models have revolutionized function-level code generation; however, repository-scale Automated Program Repair (APR) remains a significant challenge. Current approaches typically employ a control-centric paradigm, forcing agents to navigate complex directory structures and irrelevant control logic. In this paper, we propose a paradigm shift from the standard Code Property Graphs (CPGs) to the concept of Data Transformation Graph (DTG) that inverts the topology by modeling data states as nodes and functions as edges, enabling agents to trace logic defects through data lineage rather than control flow. We introduce a multi-agent framework that reconciles data integrity navigation with control flow logic. Our theoretical analysis and case studies demonstrate that this approach resolves the "Semantic Trap" inherent in standard RAG systems in modern coding agents. We provide a comprehensive implementation in the form of Autonomous Issue Resolver (AIR), a self-improvement system for zero-touch code maintenance that utilizes neuro-symbolic reasoning and uses the DTG structure for scalable logic repair. Our approach has demonstrated good results on several SWE benchmarks, reaching a resolution rate of 87.1% on SWE-Verified benchmark. Our approach directly addresses the core limitations of current AI code-assistant tools and tackles the critical need for a more robust foundation for our increasingly software-dependent world.
08 Dec 2025
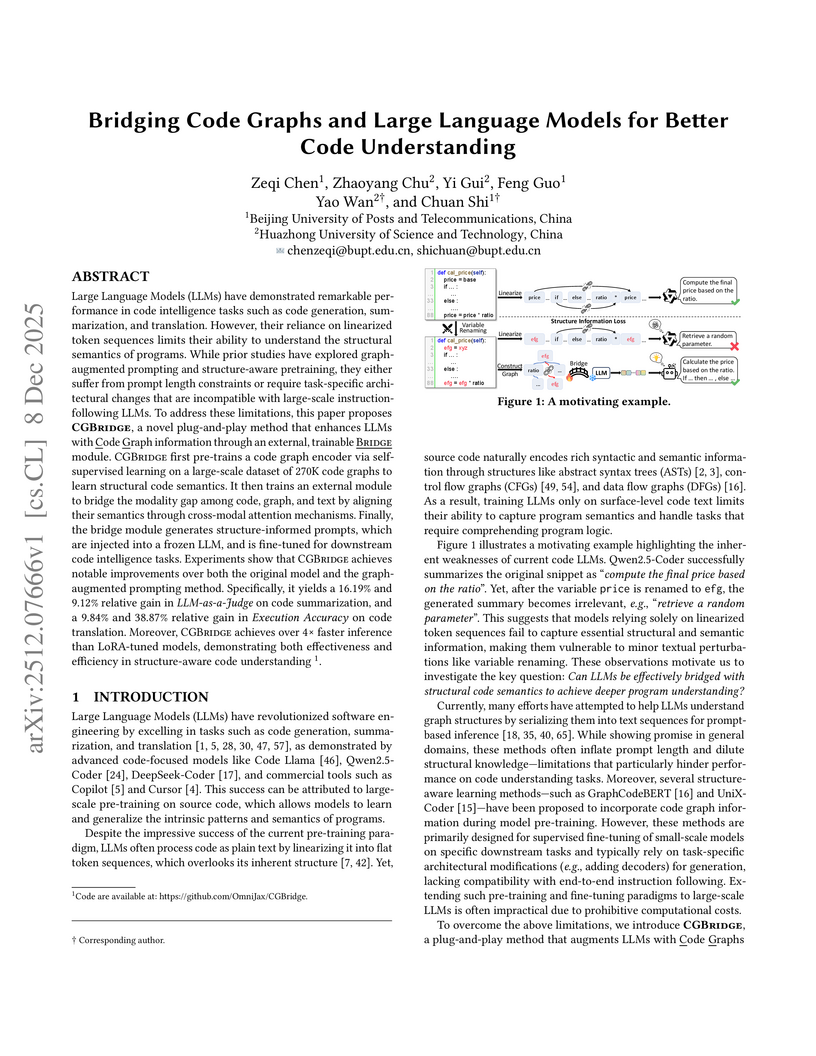
Large Language Models (LLMs) have demonstrated remarkable performance in code intelligence tasks such as code generation, summarization, and translation. However, their reliance on linearized token sequences limits their ability to understand the structural semantics of programs. While prior studies have explored graphaugmented prompting and structure-aware pretraining, they either suffer from prompt length constraints or require task-specific architectural changes that are incompatible with large-scale instructionfollowing LLMs. To address these limitations, this paper proposes CGBridge, a novel plug-and-play method that enhances LLMs with Code Graph information through an external, trainable Bridge module. CGBridge first pre-trains a code graph encoder via selfsupervised learning on a large-scale dataset of 270K code graphs to learn structural code semantics. It then trains an external module to bridge the modality gap among code, graph, and text by aligning their semantics through cross-modal attention mechanisms. Finally, the bridge module generates structure-informed prompts, which are injected into a frozen LLM, and is fine-tuned for downstream code intelligence tasks. Experiments show that CGBridge achieves notable improvements over both the original model and the graphaugmented prompting method. Specifically, it yields a 16.19% and 9.12% relative gain in LLM-as-a-Judge on code summarization, and a 9.84% and 38.87% relative gain in Execution Accuracy on code translation. Moreover, CGBridge achieves over 4x faster inference than LoRA-tuned models, demonstrating both effectiveness and efficiency in structure-aware code understanding.

10 Dec 2025

Retrieval-Augmented Generation (RAG) integrates non-parametric knowledge into Large Language Models (LLMs), typically from unstructured texts and structured graphs. While recent progress has advanced text-based RAG to multi-turn reasoning through Reinforcement Learning (RL), extending these advances to hybrid retrieval introduces additional challenges. Existing graph-based or hybrid systems typically depend on fixed or handcrafted retrieval pipelines, lacking the ability to integrate supplementary evidence as reasoning unfolds. Besides, while graph evidence provides relational structures crucial for multi-hop reasoning, it is substantially more expensive to retrieve. To address these limitations, we introduce \model{}, an RL-based framework that enables LLMs to perform multi-turn and adaptive graph-text hybrid RAG. \model{} jointly optimizes the entire generation process via RL, allowing the model to learn when to reason, what to retrieve from either texts or graphs, and when to produce final answers, all within a unified generation policy. To guide this learning process, we design a two-stage training framework that accounts for both task outcome and retrieval efficiency, enabling the model to exploit hybrid evidence while avoiding unnecessary retrieval overhead. Experimental results across five question answering benchmarks demonstrate that \model{} significantly outperforms existing RAG baselines, highlighting the benefits of end-to-end RL in supporting adaptive and efficient retrieval for complex reasoning.
10 Dec 2025


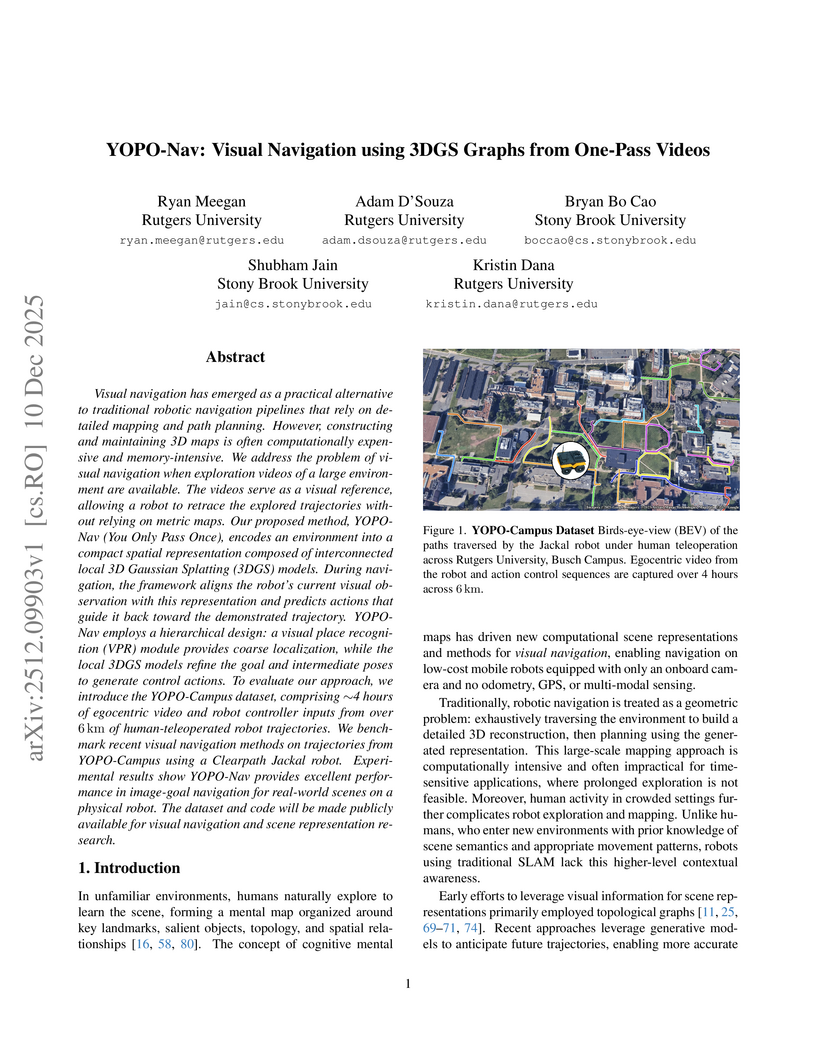
Visual navigation has emerged as a practical alternative to traditional robotic navigation pipelines that rely on detailed mapping and path planning. However, constructing and maintaining 3D maps is often computationally expensive and memory-intensive. We address the problem of visual navigation when exploration videos of a large environment are available. The videos serve as a visual reference, allowing a robot to retrace the explored trajectories without relying on metric maps. Our proposed method, YOPO-Nav (You Only Pass Once), encodes an environment into a compact spatial representation composed of interconnected local 3D Gaussian Splatting (3DGS) models. During navigation, the framework aligns the robot's current visual observation with this representation and predicts actions that guide it back toward the demonstrated trajectory. YOPO-Nav employs a hierarchical design: a visual place recognition (VPR) module provides coarse localization, while the local 3DGS models refine the goal and intermediate poses to generate control actions. To evaluate our approach, we introduce the YOPO-Campus dataset, comprising 4 hours of egocentric video and robot controller inputs from over 6 km of human-teleoperated robot trajectories. We benchmark recent visual navigation methods on trajectories from YOPO-Campus using a Clearpath Jackal robot. Experimental results show YOPO-Nav provides excellent performance in image-goal navigation for real-world scenes on a physical robot. The dataset and code will be made publicly available for visual navigation and scene representation research.

09 Dec 2025
KAIST researchers developed TabPFN-GN, a method that reformulates graph node classification as a tabular learning problem, enabling a pre-trained tabular foundation model to achieve competitive or superior performance compared to Graph Neural Networks (GNNs) without graph-specific training. The method outperforms baseline GNNs on 5 out of 6 heterophilous datasets and ranks first on 3 homophilous datasets.
09 Dec 2025
Graph-based Retrieval-Augmented Generation (GraphRAG) enhances Large Language Models (LLMs) by incorporating external knowledge from linearized subgraphs retrieved from knowledge graphs. However, LLMs struggle to interpret the relational and topological information in these inputs, resulting in hallucinations that are inconsistent with the retrieved knowledge. To analyze how LLMs attend to and retain structured knowledge during generation, we propose two lightweight interpretability metrics: Path Reliance Degree (PRD), which measures over-reliance on shortest-path triples, and Semantic Alignment Score (SAS), which assesses how well the model's internal representations align with the retrieved knowledge. Through empirical analysis on a knowledge-based QA task, we identify failure patterns associated with over-reliance on salient paths and weak semantic grounding, as indicated by high PRD and low SAS scores. We further develop a lightweight post-hoc hallucination detector, Graph Grounding and Alignment (GGA), which outperforms strong semantic and confidence-based baselines across AUC and F1. By grounding hallucination analysis in mechanistic interpretability, our work offers insights into how structural limitations in LLMs contribute to hallucinations, informing the design of more reliable GraphRAG systems in the future.

10 Dec 2025
Recent advances in generative machine learning have opened new possibilities for the discovery and design of novel materials. However, as these models become more sophisticated, the need for rigorous and meaningful evaluation metrics has grown. Existing evaluation approaches often fail to capture both the quality and novelty of generated structures, limiting our ability to assess true generative performance. In this paper, we introduce the Transport Novelty Distance (TNovD) to judge generative models used for materials discovery jointly by the quality and novelty of the generated materials. Based on ideas from Optimal Transport theory, TNovD uses a coupling between the features of the training and generated sets, which is refined into a quality and memorization regime by a threshold. The features are generated from crystal structures using a graph neural network that is trained to distinguish between materials, their augmented counterparts, and differently sized supercells using contrastive learning. We evaluate our proposed metric on typical toy experiments relevant for crystal structure prediction, including memorization, noise injection and lattice deformations. Additionally, we validate the TNovD on the MP20 validation set and the WBM substitution dataset, demonstrating that it is capable of detecting both memorized and low-quality material data. We also benchmark the performance of several popular material generative models. While introduced for materials, our TNovD framework is domain-agnostic and can be adapted for other areas, such as images and molecules.

06 Dec 2025
Accurate prediction of protein-protein binding affinity is vital for understanding molecular interactions and designing therapeutics. We adapt Boltz-2, a state-of-the-art structure-based protein-ligand affinity predictor, for protein-protein affinity regression and evaluate it on two datasets, TCR3d and PPB-affinity. Despite high structural accuracy, Boltz-2-PPI underperforms relative to sequence-based alternatives in both small- and larger-scale data regimes. Combining embeddings from Boltz-2-PPI with sequence-based embeddings yields complementary improvements, particularly for weaker sequence models, suggesting different signals are learned by sequence- and structure-based models. Our results echo known biases associated with training with structural data and suggest that current structure-based representations are not primed for performant affinity prediction.
03 Dec 2025
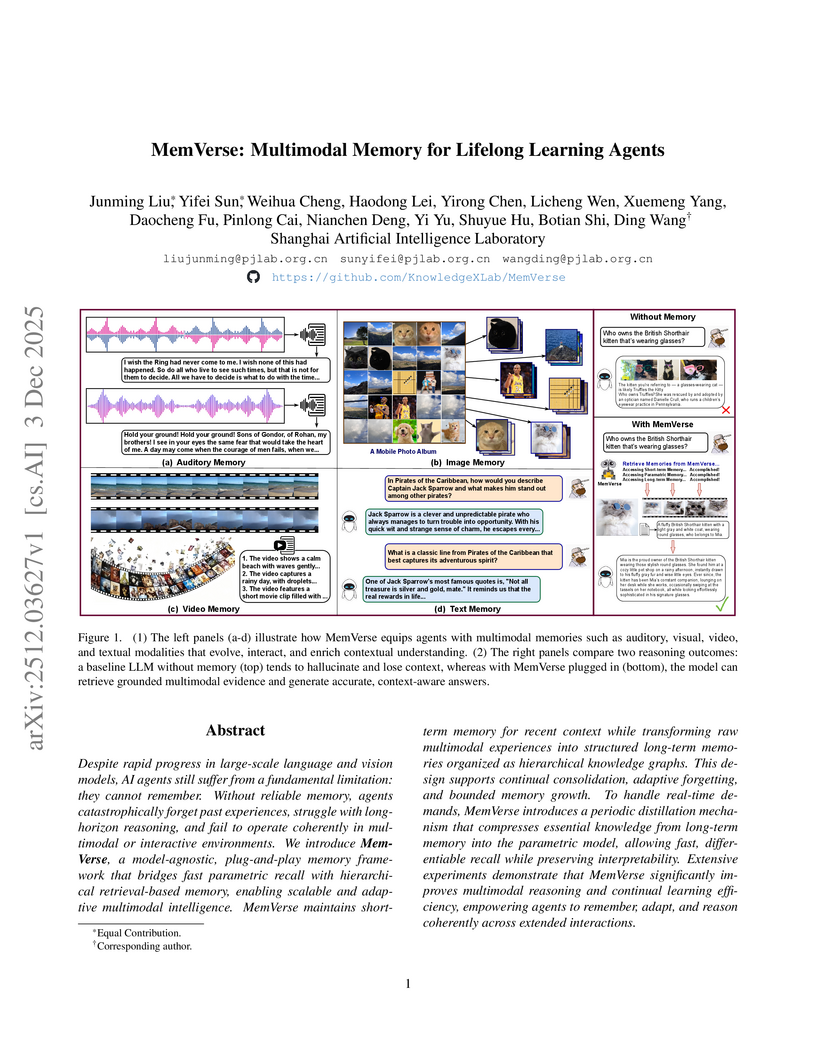
MemVerse, a multimodal memory framework from Shanghai Artificial Intelligence Laboratory, enables lifelong learning agents to integrate explicit, structured knowledge graphs with fast, distilled parametric memory. It achieved 85.48% accuracy on ScienceQA, improving GPT-4o-mini's baseline by nearly 9 percentage points, and boosted text-to-video retrieval R@1 by over 60 percentage points on MSR-VTT, while accelerating knowledge recall by 89% compared to RAG.

09 Dec 2025
The tumor microenvironment (TME) has emerged as a promising source of prognostic biomarkers. To fully leverage its potential, analysis methods must capture complex interactions between different cell types. We propose HiGINE -- a hierarchical graph-based approach to predict patient survival (short vs. long) from TME characterization in multiplex immunofluorescence (mIF) images and enhance risk stratification in lung cancer. Our model encodes both local and global inter-relations in cell neighborhoods, incorporating information about cell types and morphology. Multimodal fusion, aggregating cancer stage with mIF-derived features, further boosts performance. We validate HiGINE on two public datasets, demonstrating improved risk stratification, robustness, and generalizability.
08 Dec 2025
This research provides a systematic investigation into masking designs for self-supervised learning on molecular graphs, formalizing the pretraining pipeline and employing information-theoretic measures. The study reveals that the semantic richness of the prediction target is crucial for downstream performance, particularly when paired with expressive encoder architectures.

08 Dec 2025


MeshRipple introduces an autoregressive framework for 3D mesh generation that mitigates topological issues by maintaining structural context during the generation process. This approach yields high-fidelity, artist-friendly meshes with strong structural integrity, outperforming baselines on artist-mesh benchmarks and demonstrating efficiency in resource usage.
08 Dec 2025
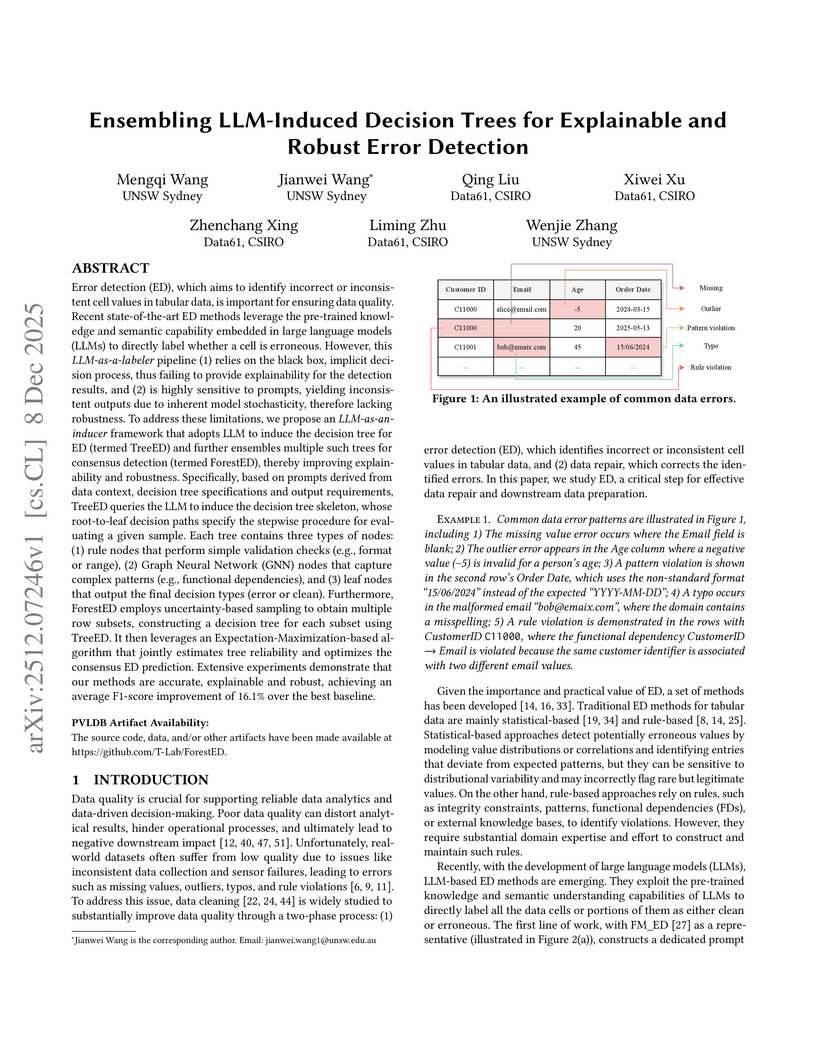
Error detection (ED), which aims to identify incorrect or inconsistent cell values in tabular data, is important for ensuring data quality. Recent state-of-the-art ED methods leverage the pre-trained knowledge and semantic capability embedded in large language models (LLMs) to directly label whether a cell is erroneous. However, this LLM-as-a-labeler pipeline (1) relies on the black box, implicit decision process, thus failing to provide explainability for the detection results, and (2) is highly sensitive to prompts, yielding inconsistent outputs due to inherent model stochasticity, therefore lacking robustness. To address these limitations, we propose an LLM-as-an-inducer framework that adopts LLM to induce the decision tree for ED (termed TreeED) and further ensembles multiple such trees for consensus detection (termed ForestED), thereby improving explainability and robustness. Specifically, based on prompts derived from data context, decision tree specifications and output requirements, TreeED queries the LLM to induce the decision tree skeleton, whose root-to-leaf decision paths specify the stepwise procedure for evaluating a given sample. Each tree contains three types of nodes: (1) rule nodes that perform simple validation checks (e.g., format or range), (2) Graph Neural Network (GNN) nodes that capture complex patterns (e.g., functional dependencies), and (3) leaf nodes that output the final decision types (error or clean). Furthermore, ForestED employs uncertainty-based sampling to obtain multiple row subsets, constructing a decision tree for each subset using TreeED. It then leverages an Expectation-Maximization-based algorithm that jointly estimates tree reliability and optimizes the consensus ED prediction. Extensive xperiments demonstrate that our methods are accurate, explainable and robust, achieving an average F1-score improvement of 16.1% over the best baseline.
08 Dec 2025
With the recent surge in personalized learning, Intelligent Tutoring Systems (ITS) that can accurately track students' individual knowledge states and provide tailored learning paths based on this information are in demand as an essential task. This paper focuses on the core technology of Knowledge Tracing (KT) models that analyze students' sequences of interactions to predict their knowledge acquisition levels. However, existing KT models suffer from limitations such as restricted input data formats, cold start problems arising with new student enrollment or new question addition, and insufficient stability in real-world service environments. To overcome these limitations, a Practical Interlinked Concept Knowledge Tracing (PICKT) model that can effectively process multiple types of input data is proposed. Specifically, a knowledge map structures the relationships among concepts considering the question and concept text information, thereby enabling effective knowledge tracing even in cold start situations. Experiments reflecting real operational environments demonstrated the model's excellent performance and practicality. The main contributions of this research are as follows. First, a model architecture that effectively utilizes diverse data formats is presented. Second, significant performance improvements are achieved over existing models for two core cold start challenges: new student enrollment and new question addition. Third, the model's stability and practicality are validated through delicate experimental design, enhancing its applicability in real-world product environments. This provides a crucial theoretical and technical foundation for the practical implementation of next-generation ITS.
08 Dec 2025
Ensuring the authenticity of video content remains challenging as DeepFake generation becomes increasingly realistic and robust against detection. Most existing detectors implicitly assume temporally consistent and clean facial sequences, an assumption that rarely holds in real-world scenarios where compression artifacts, occlusions, and adversarial attacks destabilize face detection and often lead to invalid or misdetected faces. To address these challenges, we propose a Laplacian-Regularized Graph Convolutional Network (LR-GCN) that robustly detects DeepFakes from noisy or unordered face sequences, while being trained only on clean facial data. Our method constructs an Order-Free Temporal Graph Embedding (OF-TGE) that organizes frame-wise CNN features into an adaptive sparse graph based on semantic affinities. Unlike traditional methods constrained by strict temporal continuity, OF-TGE captures intrinsic feature consistency across frames, making it resilient to shuffled, missing, or heavily corrupted inputs. We further impose a dual-level sparsity mechanism on both graph structure and node features to suppress the influence of invalid faces. Crucially, we introduce an explicit Graph Laplacian Spectral Prior that acts as a high-pass operator in the graph spectral domain, highlighting structural anomalies and forgery artifacts, which are then consolidated by a low-pass GCN aggregation. This sequential design effectively realizes a task-driven spectral band-pass mechanism that suppresses background information and random noise while preserving manipulation cues. Extensive experiments on FF++, Celeb-DFv2, and DFDC demonstrate that LR-GCN achieves state-of-the-art performance and significantly improved robustness under severe global and local disruptions, including missing faces, occlusions, and adversarially perturbed face detections.

09 Dec 2025
Early graph prompt tuning approaches relied on task-specific designs for Graph Neural Networks (GNNs), limiting their adaptability across diverse pre-training strategies. In contrast, another promising line of research has investigated universal graph prompt tuning, which operates directly in the input graph's feature space and builds a theoretical foundation that universal graph prompt tuning can theoretically achieve an equivalent effect of any prompting function, eliminating dependence on specific pre-training strategies. Recent works propose selective node-based graph prompt tuning to pursue more ideal prompts. However, we argue that selective node-based graph prompt tuning inevitably compromises the theoretical foundation of universal graph prompt tuning. In this paper, we strengthen the theoretical foundation of universal graph prompt tuning by introducing stricter constraints, demonstrating that adding prompts to all nodes is a necessary condition for achieving the universality of graph prompts. To this end, we propose a novel model and paradigm, Learning and Editing Universal GrAph Prompt Tuning (LEAP), which preserves the theoretical foundation of universal graph prompt tuning while pursuing more ideal prompts. Specifically, we first build the basic universal graph prompts to preserve the theoretical foundation and then employ actor-critic reinforcement learning to select nodes and edit prompts. Extensive experiments on graph- and node-level tasks across various pre-training strategies in both full-shot and few-shot scenarios show that LEAP consistently outperforms fine-tuning and other prompt-based approaches.

08 Dec 2025
Virtual representations of physical critical infrastructures, such as water or energy plants, are used for simulations and digital twins to ensure resilience and continuity of their services. These models usually require 3D point clouds from laser scanners that are expensive to acquire and require specialist knowledge to use. In this article, we present a graph generation pipeline based on photogrammetry. The pipeline detects relevant objects and predicts their relation using RGB images and depth data generated by a stereo camera. This more cost-effective approach uses deep learning for object detection and instance segmentation of the objects, and employs user-defined heuristics or rules to infer their relations. Results of two hydraulic systems show that this strategy can produce graphs close to the ground truth while its flexibility allows the method to be tailored to specific applications and its transparency qualifies it to be used in the high stakes decision-making that is required for critical infrastructures.
09 Dec 2025
This paper presents a mathematically rigorous framework for brain-inspired representation learning founded on the interplay between persistent topological structures and cohomological flows. Neural computation is reformulated as the evolution of cochain maps over dynamic simplicial complexes, enabling representations that capture invariants across temporal, spatial, and functional brain states. The proposed architecture integrates algebraic topology with differential geometry to construct cohomological operators that generalize gradient-based learning within a homological landscape. Synthetic data with controlled topological signatures and real neural datasets are jointly analyzed using persistent homology, sheaf cohomology, and spectral Laplacians to quantify stability, continuity, and structural preservation. Empirical results demonstrate that the model achieves superior manifold consistency and noise resilience compared to graph neural and manifold-based deep architectures, establishing a coherent mathematical foundation for topology-driven representation learning.
There are no more papers matching your filters at the moment.
