
09 Dec 2025
rSIM introduces a multi-agent reinforcement learning framework that enables smaller large language models to acquire advanced reasoning skills by coupling them with a dedicated, learnable planner agent. This method allows models as small as 0.5B parameters to achieve reasoning performance comparable to much larger models across diverse tasks.

05 Dec 2025
CompressARC, developed by researchers at Carnegie Mellon University, addresses the ARC-AGI benchmark by achieving 20% accuracy on evaluation puzzles without any pretraining, learning entirely at inference time from the target puzzle. It leverages a custom equivariant neural network and the Minimum Description Length principle to discover abstract reasoning patterns with extreme data efficiency.

04 Dec 2025
Researchers developed CoT-Recipe, a meta-training strategy that systematically modulates the inclusion of Chain-of-Thought (CoT) examples to enhance Large Language Model (LLM) reasoning capabilities on novel tasks. This method enables transformers to perform multi-step reasoning robustly, achieving up to 300% higher accuracy in scenarios where in-context CoT examples are completely absent, by effectively internalizing the reasoning process.
08 Dec 2025
Real-time calibration of stochastic volatility models (SVMs) is computationally bottlenecked by the need to repeatedly solve coupled partial differential equations (PDEs). In this work, we propose DeepSVM, a physics-informed Deep Operator Network (PI-DeepONet) designed to learn the solution operator of the Heston model across its entire parameter space. Unlike standard data-driven deep learning (DL) approaches, DeepSVM requires no labelled training data. Rather, we employ a hard-constrained ansatz that enforces terminal payoffs and static no-arbitrage conditions by design. Furthermore, we use Residual-based Adaptive Refinement (RAR) to stabilize training in difficult regions subject to high gradients. Overall, DeepSVM achieves a final training loss of and predicts highly accurate option prices across a range of typical market dynamics. While pricing accuracy is high, we find that the model's derivatives (Greeks) exhibit noise in the at-the-money (ATM) regime, highlighting the specific need for higher-order regularization in physics-informed operator learning.

10 Dec 2025
Biological neural networks learn complex behaviors from sparse, delayed feedback using local synaptic plasticity, yet the mechanisms enabling structured credit assignment remain elusive. In contrast, artificial recurrent networks solving similar tasks typically rely on biologically implausible global learning rules or hand-crafted local updates. The space of local plasticity rules capable of supporting learning from delayed reinforcement remains largely unexplored. Here, we present a meta-learning framework that discovers local learning rules for structured credit assignment in recurrent networks trained with sparse feedback. Our approach interleaves local neo-Hebbian-like updates during task execution with an outer loop that optimizes plasticity parameters via \textbf{tangent-propagation through learning}. The resulting three-factor learning rules enable long-timescale credit assignment using only local information and delayed rewards, offering new insights into biologically grounded mechanisms for learning in recurrent circuits.

05 Dec 2025

We present FNOpt, a self-supervised cloth simulation framework that formulates time integration as an optimization problem and trains a resolution-agnostic neural optimizer parameterized by a Fourier neural operator (FNO). Prior neural simulators often rely on extensive ground truth data or sacrifice fine-scale detail, and generalize poorly across resolutions and motion patterns. In contrast, FNOpt learns to simulate physically plausible cloth dynamics and achieves stable and accurate rollouts across diverse mesh resolutions and motion patterns without retraining. Trained only on a coarse grid with physics-based losses, FNOpt generalizes to finer resolutions, capturing fine-scale wrinkles and preserving rollout stability. Extensive evaluations on a benchmark cloth simulation dataset demonstrate that FNOpt outperforms prior learning-based approaches in out-of-distribution settings in both accuracy and robustness. These results position FNO-based meta-optimization as a compelling alternative to previous neural simulators for cloth, thus reducing the need for curated data and improving cross-resolution reliability.

07 Dec 2025
Automatic evaluation with large language models, commonly known as LLM-as-a-judge, is now standard across reasoning and alignment tasks. Despite evaluating many samples in deployment, these evaluators typically (i) treat each case independently, missing the opportunity to accumulate experience, and (ii) rely on a single fixed prompt for all cases, neglecting the need for sample-specific evaluation criteria. We introduce Learning While Evaluating (LWE), a framework that allows evaluators to improve sequentially at inference time without requiring training or validation sets. LWE maintains an evolving meta-prompt that (i) produces sample-specific evaluation instructions and (ii) refines itself through self-generated feedback. Furthermore, we propose Selective LWE, which updates the meta-prompt only on self-inconsistent cases, focusing computation where it matters most. This selective approach retains the benefits of sequential learning while being far more cost-effective. Across two pairwise comparison benchmarks, Selective LWE outperforms strong baselines, empirically demonstrating that evaluators can improve during sequential testing with a simple selective update, learning most from the cases they struggle with.
28 Nov 2025
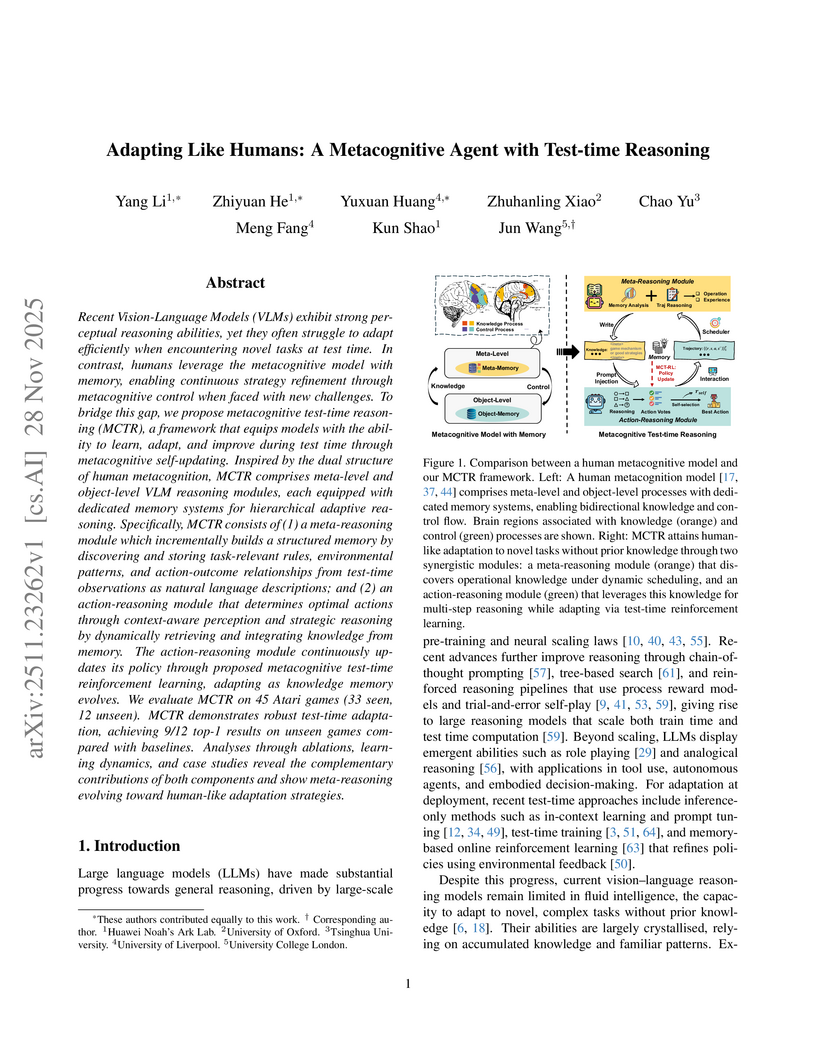
Metacognitive Test-time Reasoning (MCTR) imbues Vision-Language Models with human-like fluid intelligence through a dual-level metacognitive architecture and test-time reinforcement learning. This framework achieves state-of-the-art zero-shot adaptation, securing 9 out of 12 top-1 results on unseen Atari games and improving average unseen performance by 275% over the SFT baseline.

03 Dec 2025

Large language model based agents are increasingly deployed in complex, tool augmented environments. While reinforcement learning provides a principled mechanism for such agents to improve through interaction, its effectiveness critically depends on the availability of structured training tasks. In many realistic settings, however, no such tasks exist a challenge we term task scarcity, which has become a key bottleneck for scaling agentic RL. Existing approaches typically assume predefined task collections, an assumption that fails in novel environments where tool semantics and affordances are initially unknown. To address this limitation, we formalize the problem of Task Generation for Agentic RL, where an agent must learn within a given environment that lacks predefined tasks. We propose CuES, a Curiosity driven and Environment grounded Synthesis framework that autonomously generates diverse, executable, and meaningful tasks directly from the environment structure and affordances, without relying on handcrafted seeds or external corpora. CuES drives exploration through intrinsic curiosity, abstracts interaction patterns into reusable task schemas, and refines them through lightweight top down guidance and memory based quality control. Across three representative environments, AppWorld, BFCL, and WebShop, CuES produces task distributions that match or surpass manually curated datasets in both diversity and executability, yielding substantial downstream policy improvements. These results demonstrate that curiosity driven, environment grounded task generation provides a scalable foundation for agents that not only learn how to act, but also learn what to learn. The code is available at this https URL.

02 Dec 2025
Accurately predicting protein fitness with minimal experimental data is a persistent challenge in protein engineering. We introduce PRIMO (PRotein In-context Mutation Oracle), a transformer-based framework that leverages in-context learning and test-time training to adapt rapidly to new proteins and assays without large task-specific datasets. By encoding sequence information, auxiliary zero-shot predictions, and sparse experimental labels from many assays as a unified token set in a pre-training masked-language modeling paradigm, PRIMO learns to prioritize promising variants through a preference-based loss function. Across diverse protein families and properties-including both substitution and indel mutations-PRIMO outperforms zero-shot and fully supervised baselines. This work underscores the power of combining large-scale pre-training with efficient test-time adaptation to tackle challenging protein design tasks where data collection is expensive and label availability is limited.

01 Dec 2025
Researchers from the University of California, Santa Cruz and Accenture's Center for Advanced AI introduce PromptBridge, a training-free framework designed to facilitate prompt transfer between Large Language Models (LLMs) by addressing the "Model Drifting" phenomenon. The framework consistently improves downstream accuracy, achieving relative gains of up to 46.54% over direct transfer on benchmarks like CodeContests and 39.44% on Terminal-Bench.

04 Dec 2025
Neural architecture search (NAS) in expressive search spaces is a computationally hard problem, but it also holds the potential to automatically discover completely novel and performant architectures. To achieve this we need effective search algorithms that can identify powerful components and reuse them in new candidate architectures. In this paper, we introduce two adapted variants of the Smith-Waterman algorithm for local sequence alignment and use them to compute the edit distance in a grammar-based evolutionary architecture search. These algorithms enable us to efficiently calculate a distance metric for neural architectures and to generate a set of hybrid offspring from two parent models. This facilitates the deployment of crossover-based search heuristics, allows us to perform a thorough analysis on the architectural loss landscape, and track population diversity during search. We highlight how our method vastly improves computational complexity over previous work and enables us to efficiently compute shortest paths between architectures. When instantiating the crossover in evolutionary searches, we achieve competitive results, outperforming competing methods. Future work can build upon this new tool, discovering novel components that can be used more broadly across neural architecture design, and broadening its applications beyond NAS.

03 Dec 2025
The paper by Przemyslaw Chojecki (ulam.ai) introduces a geometric framework for evaluating and understanding AI progress toward AGI. It proposes an Autonomous AI (AAI) Scale, a moduli space for psychometric benchmarks, and a Generator-Verifier-Updater (GVU) loop to model self-improvement, offering a mathematical basis for measuring agent capabilities and dynamic learning.
02 Dec 2025
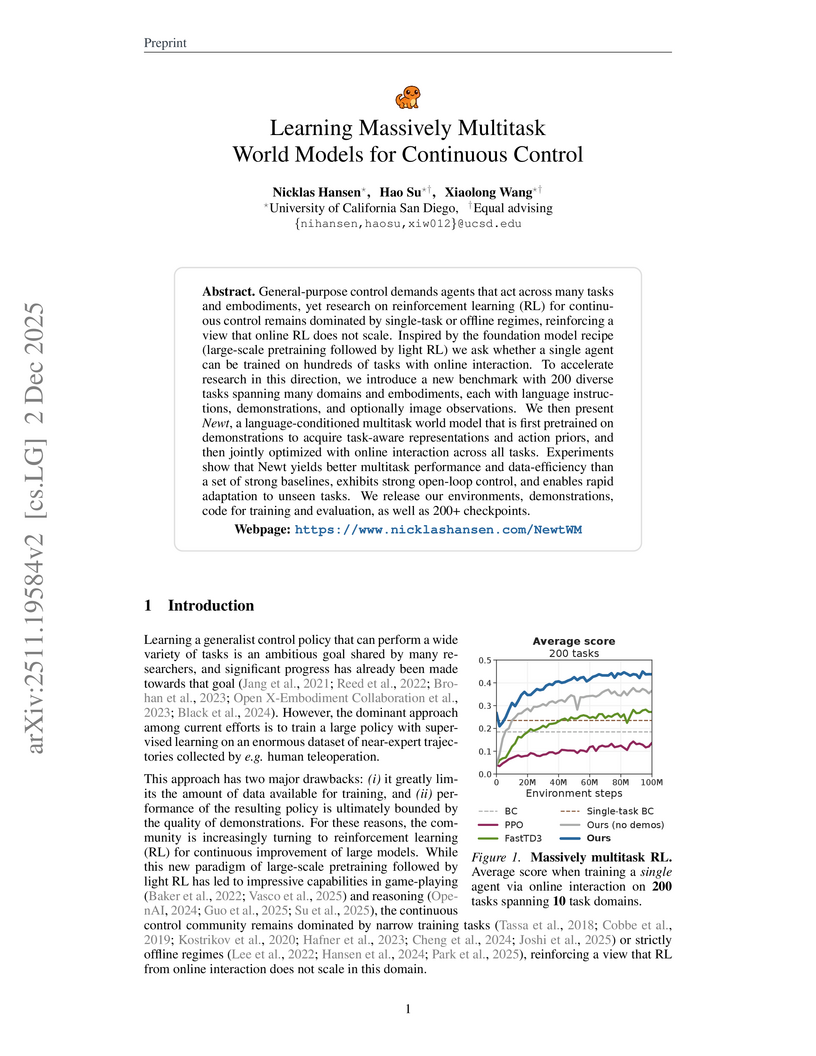
General-purpose control demands agents that act across many tasks and embodiments, yet research on reinforcement learning (RL) for continuous control remains dominated by single-task or offline regimes, reinforcing a view that online RL does not scale. Inspired by the foundation model recipe (large-scale pretraining followed by light RL) we ask whether a single agent can be trained on hundreds of tasks with online interaction. To accelerate research in this direction, we introduce a new benchmark with 200 diverse tasks spanning many domains and embodiments, each with language instructions, demonstrations, and optionally image observations. We then present \emph{Newt}, a language-conditioned multitask world model that is first pretrained on demonstrations to acquire task-aware representations and action priors, and then jointly optimized with online interaction across all tasks. Experiments show that Newt yields better multitask performance and data-efficiency than a set of strong baselines, exhibits strong open-loop control, and enables rapid adaptation to unseen tasks. We release our environments, demonstrations, code for training and evaluation, as well as 200+ checkpoints.
26 Nov 2025
Feature transformation enhances downstream task performance by generating informative features through mathematical feature crossing. Despite the advancements in deep learning, feature transformation remains essential for structured data, where deep models often struggle to capture complex feature interactions. Prior literature on automated feature transformation has achieved success but often relies on heuristics or exhaustive searches, leading to inefficient and time-consuming processes. Recent works employ reinforcement learning (RL) to enhance traditional approaches through a more effective trial-and-error way. However, two limitations remain: 1) Dynamic feature expansion during the transformation process, which causes instability and increases the learning complexity for RL agents; 2) Insufficient cooperation and communication between agents, which results in suboptimal feature crossing operations and degraded model performance. To address them, we propose a novel heterogeneous multi-agent RL framework to enable cooperative and scalable feature transformation. The framework comprises three heterogeneous agents, grouped into two types, each designed to select essential features and operations for feature crossing. To enhance communication among these agents, we implement a shared critic mechanism that facilitates information exchange during feature transformation. To handle the dynamically expanding feature space, we tailor multi-head attention-based feature agents to select suitable features for feature crossing. Additionally, we introduce a state encoding technique during the optimization process to stabilize and enhance the learning dynamics of the RL agents, resulting in more robust and reliable transformation policies. Finally, we conduct extensive experiments to validate the effectiveness, efficiency, robustness, and interpretability of our model.

02 Dec 2025
The development of tabular foundation models (TFMs) has accelerated in recent years, showing strong potential to outperform traditional ML methods for structured data. A key finding is that TFMs can be pretrained entirely on synthetic datasets, opening opportunities to design data generators that encourage desirable model properties. Prior work has mainly focused on crafting high-quality priors over generators to improve overall pretraining performance. Our insight is that parameterizing the generator distribution enables an adversarial robustness perspective: during training, we can adapt the generator to emphasize datasets that are particularly challenging for the model. We formalize this by introducing an optimality gap measure, given by the difference between TFM performance and the best achievable performance as estimated by strong baselines such as XGBoost, CatBoost, and Random Forests. Building on this idea, we propose Robust Tabular Foundation Models (RTFM), a model-agnostic adversarial training framework. Applied to the TabPFN V2 classifier, RTFM improves benchmark performance, with up to a 6% increase in mean normalized AUC over the original TabPFN and other baseline algorithms, while requiring less than 100k additional synthetic datasets. These results highlight a promising new direction for targeted adversarial training and fine-tuning of TFMs using synthetic data alone.

03 Dec 2025


Humans naturally adapt to diverse environments by learning underlying rules across worlds with different dynamics, observations, and reward structures. In contrast, existing agents typically demonstrate improvements via self-evolving within a single domain, implicitly assuming a fixed environment distribution. Cross-environment learning has remained largely unmeasured: there is no standard collection of controllable, heterogeneous environments, nor a unified way to represent how agents learn. We address these gaps in two steps. First, we propose AutoEnv, an automated framework that treats environments as factorizable distributions over transitions, observations, and rewards, enabling low-cost (4.12 USD on average) generation of heterogeneous worlds. Using AutoEnv, we construct AutoEnv-36, a dataset of 36 environments with 358 validated levels, on which seven language models achieve 12-49% normalized reward, demonstrating the challenge of AutoEnv-36. Second, we formalize agent learning as a component-centric process driven by three stages of Selection, Optimization, and Evaluation applied to an improvable agent component. Using this formulation, we design eight learning methods and evaluate them on AutoEnv-36. Empirically, the gain of any single learning method quickly decrease as the number of environments increases, revealing that fixed learning methods do not scale across heterogeneous environments. Environment-adaptive selection of learning methods substantially improves performance but exhibits diminishing returns as the method space expands. These results highlight both the necessity and the current limitations of agent learning for scalable cross-environment generalization, and position AutoEnv and AutoEnv-36 as a testbed for studying cross-environment agent learning. The code is avaiable at this https URL.
26 Nov 2025

Researchers at Cornell Tech developed a unified theoretical and algorithmic framework that integrates offline data selection with online self-refining generation for post-training large language models. The framework offers a theoretical basis for bilevel data selection over direct mixing and empirically improves LLM performance in quality enhancement and safety-aware fine-tuning.

02 Dec 2025

Adapting large pre-trained models to unseen tasks under tight data and compute budgets remains challenging. Meta-learning approaches explicitly learn good initializations, but they require an additional meta-training phase over many tasks, incur high training cost, and can be unstable. At the same time, the number of task-specific pre-trained models continues to grow, yet the question of how to transfer them to new tasks with minimal additional training remains relatively underexplored. We propose BOLT (Basis-Oriented Low-rank Transfer), a framework that reuses existing fine-tuned models not by merging weights, but instead by extracting an orthogonal, task-informed spectral basis and adapting within that subspace. In the offline phase, BOLT collects dominant singular directions from multiple task vectors and orthogonalizes them per layer to form reusable bases. In the online phase, we freeze these bases and train only a small set of diagonal coefficients per layer for the new task, yielding a rank-controlled update with very few trainable parameters. This design provides (i) a strong, training-free initialization for unseen tasks, obtained by pooling source-task coefficients, along with a lightweight rescaling step while leveraging the shared orthogonal bases, and (ii) a parameter-efficient fine-tuning (PEFT) path that, in our experiments, achieves robust performance compared to common PEFT baselines as well as a representative meta-learned initialization. Our results show that constraining adaptation to a task-informed orthogonal subspace provides an effective alternative for unseen-task transfer.

25 Nov 2025
This research introduces CHONKNORIS and FONKNORIS, frameworks that enable operator learning to achieve machine precision (relative L2 errors of 10⁻¹⁶) for nonlinear Partial Differential Equations (PDEs) and inverse problems. By embedding the Newton-Kantorovich method and learning its Cholesky factors, the approach significantly surpasses the accuracy of existing neural operators while also demonstrating generalization to unseen PDE families.
There are no more papers matching your filters at the moment.
