
19 Nov 2025
We introduce a quantum spin van der Pol (vdP) oscillator as a prototypical model of quantum spinbased limit-cycle oscillators, which coincides with the quantum optical vdP oscillator in the high-spin limit. The system is described as a noisy limit-cycle oscillator in the semiclassical regime at large spin numbers, exhibiting frequency entrainment to a periodic drive. Even in the smallest spin-1 case, mutual synchronization, Arnold tongues, and entanglement tongues in two dissipatively coupled oscillators, and collective synchronization in all-to-all coupled oscillators are clearly observed. The proposed quantum spin vdP oscillator will provide a useful platform for analyzing quantum spin synchronization.

10 Jul 2024

RoCap is an automated robotic data collection system that generates labeled training data for 6D pose estimation of objects with changing appearances. Models trained with RoCap data demonstrate superior performance compared to those trained with synthetic data or few-shot methods like Gen6D, particularly for deformable, transparent, and articulated objects.

09 Mar 2025
This study from Future University Hakodate compared the effectiveness of zero-shot Chain-of-Thought (CoT) prompting in Japanese and English using ChatGPT-3.5 and GPT-4o-mini on MMLU and JMMLU benchmarks. Findings revealed that zero-shot CoT generally decreased performance across both languages and models, with a particularly substantial negative impact on the newer GPT-4o-mini, challenging the universal applicability of CoT.
13 Feb 2018
This paper investigates a critical access control issue in the Internet of Things (IoT). In particular, we propose a smart contract-based framework, which consists of multiple access control contracts (ACCs), one judge contract (JC) and one register contract (RC), to achieve distributed and trustworthy access control for IoT systems. Each ACC provides one access control method for a subject-object pair, and implements both static access right validation based on predefined policies and dynamic access right validation by checking the behavior of the subject. The JC implements a misbehavior-judging method to facilitate the dynamic validation of the ACCs by receiving misbehavior reports from the ACCs, judging the misbehavior and returning the corresponding penalty. The RC registers the information of the access control and misbehavior-judging methods as well as their smart contracts, and also provides functions (e.g., register, update and delete) to manage these methods. To demonstrate the application of the framework, we provide a case study in an IoT system with one desktop computer, one laptop and two Raspberry Pi single-board computers, where the ACCs, JC and RC are implemented based on the Ethereum smart contract platform to achieve the access control.

20 Jun 2024
Nonlinear and non-stationary processes are prevalent in various natural and
physical phenomena, where system dynamics can change qualitatively due to
bifurcation phenomena. Traditional machine learning methods have advanced our
ability to learn and predict such systems from observed time series data.
However, predicting the behavior of systems with temporal parameter variations
without knowledge of true parameter values remains a significant challenge.
This study leverages the reservoir computing framework to address this problem
by unsupervised extraction of slowly varying system parameters from time series
data. We propose a model architecture consisting of a slow reservoir with long
timescale internal dynamics and a fast reservoir with short timescale dynamics.
The slow reservoir extracts the temporal variation of system parameters, which
are then used to predict unknown bifurcations in the fast dynamics. Through
experiments using data generated from chaotic dynamical systems, we demonstrate
the ability to predict bifurcations not present in the training data. Our
approach shows potential for applications in fields such as neuroscience,
material science, and weather prediction, where slow dynamics influencing
qualitative changes are often unobservable.
06 Oct 2022
 the University of TokyoFuture University HakodateResearch Institute of Electrical Communication (RIEC), Tohoku UniversityAdvanced Institute for Materials Research (WPI-AIMR), Tohoku UniversityGraduate School of Biomedical Engineering, Tohoku UniversityGraduate School of Pharmaceutical Sciences, Tohoku University
the University of TokyoFuture University HakodateResearch Institute of Electrical Communication (RIEC), Tohoku UniversityAdvanced Institute for Materials Research (WPI-AIMR), Tohoku UniversityGraduate School of Biomedical Engineering, Tohoku UniversityGraduate School of Pharmaceutical Sciences, Tohoku UniversityReservoir computing is a machine learning paradigm that transforms the
transient dynamics of high-dimensional nonlinear systems for processing
time-series data. Although reservoir computing was initially proposed to model
information processing in the mammalian cortex, it remains unclear how the
non-random network architecture, such as the modular architecture, in the
cortex integrates with the biophysics of living neurons to characterize the
function of biological neuronal networks (BNNs). Here, we used optogenetics and
fluorescent calcium imaging to record the multicellular responses of cultured
BNNs and employed the reservoir computing framework to decode their
computational capabilities. Micropatterned substrates were used to embed the
modular architecture in the BNNs. We first show that modular BNNs can be used
to classify static input patterns with a linear decoder and that the modularity
of the BNNs positively correlates with the classification accuracy. We then
used a timer task to verify that BNNs possess a short-term memory of ~1 s and
finally show that this property can be exploited for spoken digit
classification. Interestingly, BNN-based reservoirs allow transfer learning,
wherein a network trained on one dataset can be used to classify separate
datasets of the same category. Such classification was not possible when the
input patterns were directly decoded by a linear decoder, suggesting that BNNs
act as a generalization filter to improve reservoir computing performance. Our
findings pave the way toward a mechanistic understanding of information
processing within BNNs and, simultaneously, build future expectations toward
the realization of physical reservoir computing systems based on BNNs.

20 Sep 2024
Learning in neural systems occurs through change in synaptic connectivity
that is driven by neural activity. Learning performance is influenced by both
neural activity and the task to be learned. Experimental studies suggest a link
between learning speed and variability in neural activity before learning.
However, the theoretical basis of this relationship has remained unclear. In
this work, using principles from the fluctuation-response relation in
statistical physics, we derive two formulae that connect neural activity with
learning speed. The first formula shows that learning speed is proportional to
the variance of spontaneous neural activity and the neural response to input.
The second formula, for small input, indicates that speed is proportional to
the variances of spontaneous activity in both target and input directions.
These formulae apply to various learning tasks governed by Hebbian or
generalized learning rules. Numerical simulations confirm that these formulae
are valid beyond their theoretical assumptions, even in cases where synaptic
connectivity undergoes large changes. Our theory predicts that learning speed
increases with the gain of neuronal activation functions and the number of
pre-embedded memories, as both enhance the variance of spontaneous neural
fluctuations. Additionally, the formulae reveal which input/output
relationships are easier to learn, aligning with experimental data. Thus, our
results provide a theoretical foundation for the quantitative relationship
between pre-learning neural activity fluctuations and learning speed, offering
insights into a range of empirical observations.

19 Oct 2025
Controlling the behavior of nonlinear systems on networks is a paramount task in control theory, in particular the control of synchronization, given its vast applicability. In this work, we focus on pinning control and we examine two different approaches: the first, more common in engineering applications, where the control is implemented through an external input (additive pinning); the other, where the parameters of the pinned nodes are varied (parametric pinning). By means of the phase reduction technique, we show that the two pinning approaches are equivalent for weakly coupled systems exhibiting periodic oscillatory behaviors. Through numerical simulations, we validate the claim for a system of coupled Stuart--Landau oscillators. Our results pave the way for further applications of pinning control in real-world systems.

06 Nov 2025
In this paper we consider the mathematical relationship between nonlocal interactions of convolution type and multiple diffusive substances in high dimensions. Motivated by that the nonlocal evolution equations reproduce similar patterns to those in reaction-diffusion systems, we approximate nonlocal interactions in evolution equations by the solution to a reaction-diffusion system in any dimensional Euclidean space. The key aspect of this approach is that any absolutely integrable radial kernels can be approximated by a linear combination of specific Green functions. This enables us to demonstrate that any nonlocal interactions of convolution type can be approximated by a linear sum of auxiliary diffusive substances. Moreover, we show that the parameters in the reaction-diffusion system can be specified depending on the kernel shape up to three dimensions. Our results establish a connection between a broad class of nonlocal interactions and diffusive chemical reactions in dynamical systems.

03 Feb 2015

The maximum entropy principle is a powerful tool for solving underdetermined inverse problems. This paper considers the problem of discretizing a continuous distribution, which arises in various applied fields. We obtain the approximating distribution by minimizing the Kullback-Leibler information (relative entropy) of the unknown discrete distribution relative to an initial discretization based on a quadrature formula subject to some moment constraints. We study the theoretical error bound and the convergence of this approximation method as the number of discrete points increases. We prove that (i) the theoretical error bound of the approximate expectation of any bounded continuous function has at most the same order as the quadrature formula we start with, and (ii) the approximate discrete distribution weakly converges to the given continuous distribution. Moreover, we present some numerical examples that show the advantage of the method and apply to numerically solving an optimal portfolio problem.
11 Jul 2025
Beam alignment (BA) is a crucial process in millimeter-wave (mmWave) communications, enabling precise directional transmission and efficient link establishment. However, due to characteristics like omnidirectional exposure and the broadcast nature of the BA phase, it is particularly vulnerable to eavesdropping and identity impersonation attacks. To this end, this paper proposes a novel secure framework named CovertAuth, designed to enhance the security of the BA phase against such attacks. In particular, to combat eavesdropping attacks, the closed-form expressions of successful BA probability and covert transmission rate are first derived. Then, a covert communication problem aimed at jointly optimizing beam training budget and transmission power is formulated to maximize covert communication rate, subject to the covertness requirement. An alternating optimization algorithm combined with successive convex approximation is employed to iteratively achieve optimal results. To combat impersonation attacks, the mutual coupling effect of antenna array impairments is explored as a device feature to design a weighted-sum energy detector based physical layer authentication scheme. Moreover, theoretical models for authentication metrics like detection and false alarm probabilities are also provided to conduct performance analysis. Based on these models, an optimization problem is constructed to determine the optimal weight value that maximizes authentication accuracy. Finally, simulation results demonstrate that CovertAuth presents improved detection accuracy under the same covertness requirement compared to existing works.
25 Jun 2025
In dynamical systems on networks, one assigns the dynamics to nodes, which are then coupled via links. This approach does not account for group interactions and dynamics on links and other higher dimensional structures. Higher-order network theory addresses this by considering variables defined on nodes, links, triangles, and higher-order simplices, called topological signals (or cochains). Moreover, topological signals of different dimensions can interact through the Dirac-Bianconi operator, which allows coupling between topological signals defined, for example, on nodes and links. Such interactions can induce various dynamical behaviors, for example, periodic oscillations. The oscillating system consists of topological signals on nodes and links whose dynamics are driven by the Dirac-Bianconi coupling, hence, which we call it Dirac-Bianconi driven oscillator. Using the phase reduction method, we obtain a phase description of this system and apply it to the study of synchronization between two such oscillators. This approach offers a way to analyze oscillatory behaviors in higher-order networks beyond the node-based paradigm, while providing a ductile modeling tool for node- and edge-signals.
01 Feb 2023
This paper investigates the covert communication in an air-to-ground (A2G) system, where a UAV (Alice) can adopt the omnidirectional microwave (OM) or directional mmWave (DM) transmission mode to transmit covert data to a ground user (Bob) while suffering from the detection of an adversary (Willie). For both the OM and DM modes, we first conduct theoretical analysis to reveal the inherent relationship between the transmit rate/transmit power and basic covert performance metrics in terms of detection error probability (DEP), effective covert rate (ECR), and covert Shannon capacity (CSC). To facilitate the transmission mode selection at Alice, we then explore the optimization of transmit rate and transmit power for ECR/CSC maximization under the OM and DM modes, and further propose a hybrid OM/DM transmission mode which allows the UAV to adaptively select between the OM and DM modes to achieve the maximum ECR and CSC at a given location of UAV. Finally, extensive numerical results are provided to illustrate the covert performances of the concerned A2G system under different transmission modes, and demonstrate that the hybrid OM/DM transmission mode outperforms the pure OM or DM mode in terms of covert performance.
10 Jun 2020

Predicting which action (treatment) will lead to a better outcome is a
central task in decision support systems. To build a prediction model in real
situations, learning from biased observational data is a critical issue due to
the lack of randomized controlled trial (RCT) data. To handle such biased
observational data, recent efforts in causal inference and counterfactual
machine learning have focused on debiased estimation of the potential outcomes
on a binary action space and the difference between them, namely, the
individual treatment effect. When it comes to a large action space (e.g.,
selecting an appropriate combination of medicines for a patient), however, the
regression accuracy of the potential outcomes is no longer sufficient in
practical terms to achieve a good decision-making performance. This is because
the mean accuracy on the large action space does not guarantee the nonexistence
of a single potential outcome misestimation that might mislead the whole
decision. Our proposed loss minimizes a classification error of whether or not
the action is relatively good for the individual target among all feasible
actions, which further improves the decision-making performance, as we prove.
We also propose a network architecture and a regularizer that extracts a
debiased representation not only from the individual feature but also from the
biased action for better generalization in large action spaces. Extensive
experiments on synthetic and semi-synthetic datasets demonstrate the
superiority of our method for large combinatorial action spaces.
28 Jul 2025


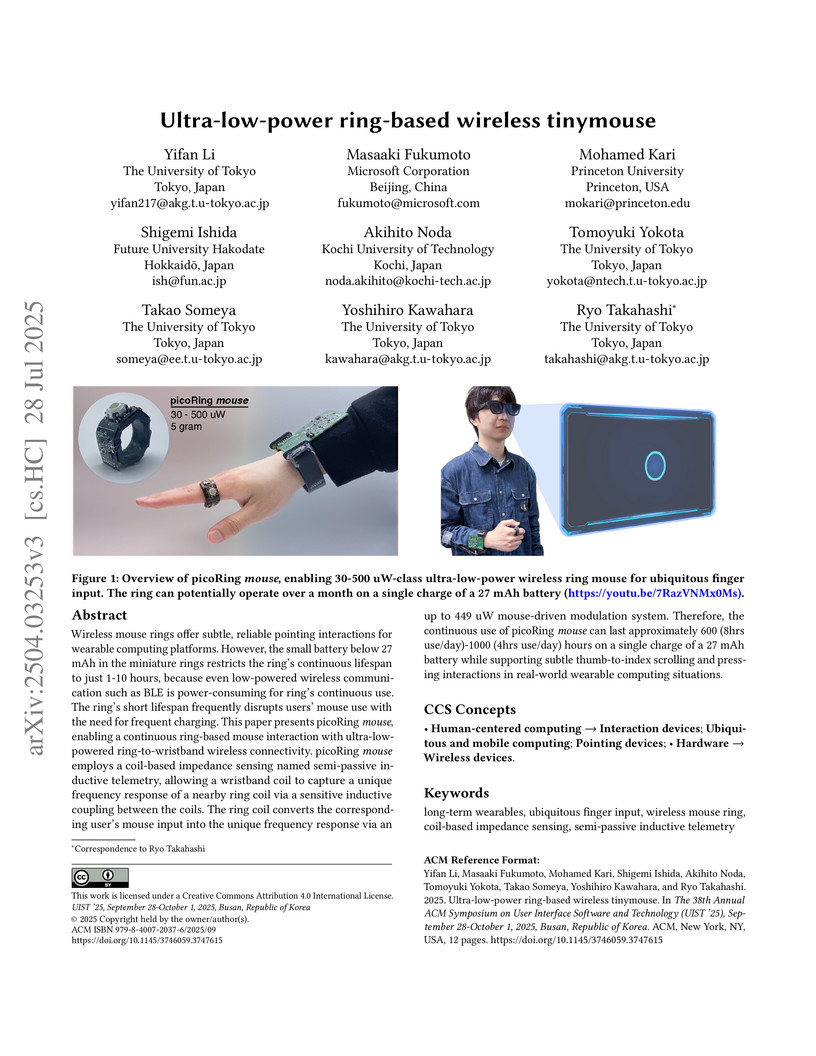
Wireless mouse rings offer subtle, reliable pointing interactions for wearable computing platforms. However, the small battery below 27 mAh in the miniature rings restricts the ring's continuous lifespan to just 1-10 hours, because current low-powered wireless communication such as BLE is power-consuming for ring's continuous use. The ring's short lifespan frequently disrupts users' mouse use with the need for frequent charging. This paper presents picoRing mouse, enabling a continuous ring-based mouse interaction with ultra-low-powered ring-to-wristband wireless communication. picoRing mouse employs a coil-based impedance sensing named semi-passive inductive telemetry, allowing a wristband coil to capture a unique frequency response of a nearby ring coil via a sensitive inductive coupling between the coils. The ring coil converts the corresponding user's mouse input into the unique frequency response via an up to 449 uW mouse-driven modulation system. Therefore, the continuous use of picoRing mouse can last approximately 600 (8hrs use/day)-1000 (4hrs use/day) hours on a single charge of a 27 mAh battery while supporting subtle thumb-to-index scrolling and pressing interactions in real-world wearable computing situations.

06 Nov 2024

We present a data-driven framework for learning hydrodynamic equations from particle-based simulations of active matter. Our method leverages coarse-graining in both space and time to bridge microscopic particle dynamics with macroscopic continuum models. By employing spectral representations and sparse regression, we efficiently estimate partial differential equations (PDEs) that capture collective behaviors such as flocking and phase separation. This approach, validated using hydrodynamic descriptions of the Vicsek model and Active Brownian particles, demonstrates the potential of data-driven strategies to uncover the universal features of collective dynamics in active matter systems.

19 Nov 2024
Robot controllers are often optimised for a single robot in a single environment. This approach proves brittle, as such a controller will often fail to produce sensible behavior for a new morphology or environment. In comparison, animal gaits are robust and versatile. By observing animals, and attempting to extract general principles of locomotion from their movement, we aim to design a single decentralised controller applicable to diverse morphologies and environments. The controller implements the three components 1) undulation, 2) peristalsis, and 3) leg motion, which we believe are the essential elements in most animal gaits. The controller is tested on a variety of simulated centipede-like robots. The centipede is chosen as inspiration because it moves using both body contractions and legged locomotion. For a controller to work in qualitatively different settings, it must also be able to exhibit qualitatively different behaviors. We find that six different modes of locomotion emerge from our controller in response to environmental and morphological changes. We also find that different parts of the centipede model can exhibit different modes of locomotion, simultaneously, based on local morphological features. This controller can potentially aid in the design or evolution of robots, by quickly testing the potential of a morphology, or be used to get insights about underlying locomotion principles in the centipede.

16 Jan 2025
Asymptotic phase and amplitudes are fundamental concepts in the analysis of limit-cycle oscillators. In this paper, we briefly review the definition of these quantities, particularly a generalization to stochastic oscillatory systems from the viewpoint of Koopman operator theory, and discuss a data-driven approach to estimate the asymptotic phase and amplitude functions from time-series data of stochastic oscillatory systems. We demonstrate that the standard Extended dynamic mode decomposition (EDMD) can successfully reconstruct the phase and amplitude functions of the noisy FitzHugh-Nagumo neuron model only from the time-series data.
22 Feb 2025
The binary expansions of irrational algebraic numbers can serve as
high-quality pseudorandom binary sequences. This study presents an efficient
method for computing the exact binary expansions of real quadratic algebraic
integers using Newton's method. To this end, we clarify conditions under which
the first bits of the binary expansion of an irrational number match those
of its upper rational approximation. Furthermore, we establish that the
worst-case time complexity of generating a sequence of length with the
proposed method is equivalent to the complexity of multiplying two -bit
integers, showing its efficiency compared to a previously proposed true orbit
generator. We report the results of numerical experiments on computation time
and memory usage, highlighting in particular that the proposed method
successfully accelerates true orbit pseudorandom number generation. We also
confirm that a generated pseudorandom sequence successfully passes all the
statistical tests included in RabbitFile of TestU01.

01 Mar 2025
The phenomenon where cells with elongated protrusions, such as neurons,
communicate by contacting other cells and arrange themselves appropriately is
termed cell sorting through haptotaxis. This phenomenon is described by partial
differential equations involving nonlocal advection. In contrast, cell
phenomena where cells communicate with other cells via chemical substances and
arrange themselves appropriately are termed cell sorting through chemotaxis,
typically modeled by chemotactic systems such as the Keller--Segel model.
Although there are clear differences between haptotaxis and chemotaxis, similar
behaviors are often observed. In this study, we investigate the relationship
between haptotaxis and chemotaxis in cell sorting phenomena. Specifically, we
analyze the connections between a nonlocal aggregation model for haptotaxis and
a Keller--Segel type chemotaxis system. By demonstrating convergence under
specific kernel approximations, we show how these distinct mechanisms can lead
to comparable dynamic behaviors. This study provides a mathematical framework
for understanding the interplay between haptotaxis and chemotaxis in cell
sorting phenomena.
There are no more papers matching your filters at the moment.
