
07 Apr 2022

DaViT, developed by researchers from The University of Hong Kong, Microsoft, and Baidu, presents a Vision Transformer architecture that combines spatial window attention with a novel channel group attention. This dual attention mechanism efficiently captures both local and global contextual information, achieving linear computational complexity while improving performance across image classification, object detection, and semantic segmentation benchmarks compared to existing methods.
09 Jan 2022

We present CSWin Transformer, an efficient and effective Transformer-based backbone for general-purpose vision tasks. A challenging issue in Transformer design is that global self-attention is very expensive to compute whereas local self-attention often limits the field of interactions of each token. To address this issue, we develop the Cross-Shaped Window self-attention mechanism for computing self-attention in the horizontal and vertical stripes in parallel that form a cross-shaped window, with each stripe obtained by splitting the input feature into stripes of equal width. We provide a mathematical analysis of the effect of the stripe width and vary the stripe width for different layers of the Transformer network which achieves strong modeling capability while limiting the computation cost. We also introduce Locally-enhanced Positional Encoding (LePE), which handles the local positional information better than existing encoding schemes. LePE naturally supports arbitrary input resolutions, and is thus especially effective and friendly for downstream tasks. Incorporated with these designs and a hierarchical structure, CSWin Transformer demonstrates competitive performance on common vision tasks. Specifically, it achieves 85.4\% Top-1 accuracy on ImageNet-1K without any extra training data or label, 53.9 box AP and 46.4 mask AP on the COCO detection task, and 52.2 mIOU on the ADE20K semantic segmentation task, surpassing previous state-of-the-art Swin Transformer backbone by +1.2, +2.0, +1.4, and +2.0 respectively under the similar FLOPs setting. By further pretraining on the larger dataset ImageNet-21K, we achieve 87.5% Top-1 accuracy on ImageNet-1K and high segmentation performance on ADE20K with 55.7 mIoU. The code and models are available at this https URL.
21 Dec 2022


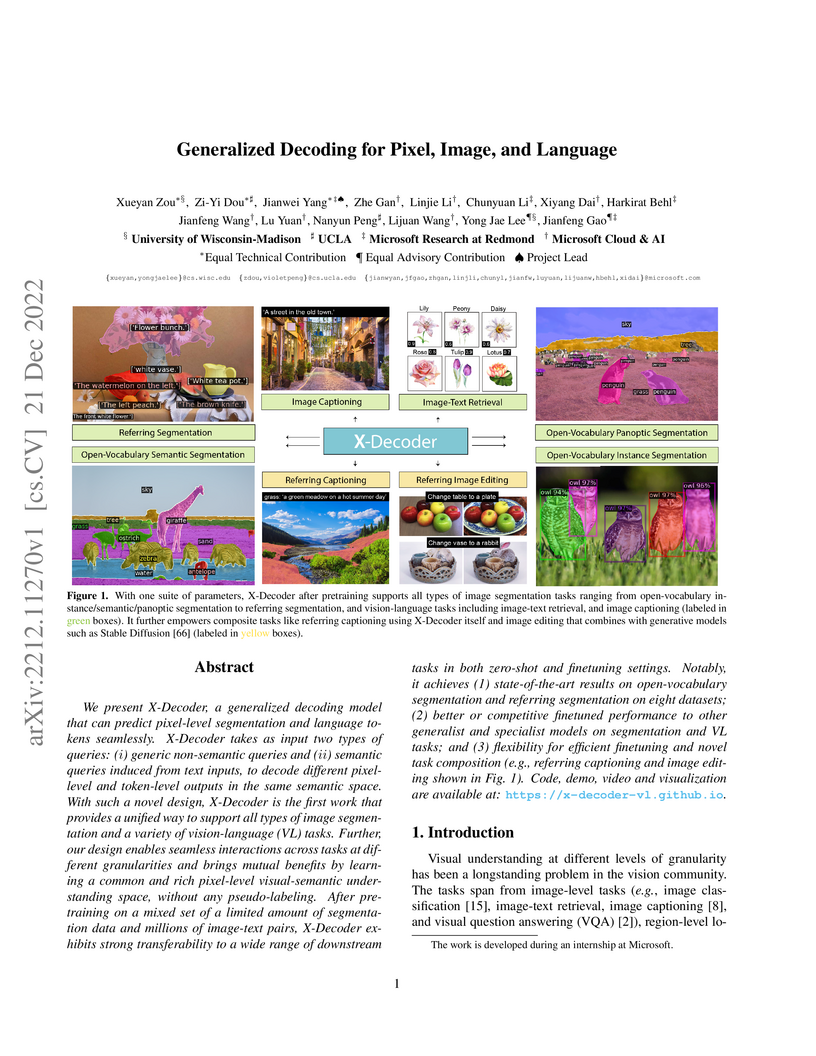
X-Decoder, developed through a collaboration between Microsoft Research and academic institutions, introduces a generalized decoding model that seamlessly integrates pixel-level segmentation with image and vision-language tasks. It establishes new state-of-the-art zero-shot performance across various open-vocabulary segmentation benchmarks and achieves competitive results on image-text retrieval, captioning, and visual question answering.

01 Jul 2021

The Focal Transformer presents a novel focal self-attention mechanism that efficiently captures both fine-grained local details and coarse-grained global context by attending to nearby tokens at original resolution and distant tokens after pooling. This approach improves performance over Swin Transformer on ImageNet classification (e.g., Focal-Tiny at 82.2% vs. Swin-Tiny at 81.2%), COCO object detection, and ADE20K semantic segmentation.

02 Mar 2022

HairCLIP presents a unified framework for realistic hair manipulation that accepts both text descriptions and reference images as input. It effectively disentangles hair attributes and preserves identity, producing high-fidelity edits while outperforming previous text-driven and image-based hair transfer methods in visual quality and user preference.

06 Jul 2022
EsViT integrates efficient multi-stage Vision Transformers with a non-contrastive region-matching task to achieve state-of-the-art visual representation learning. The framework provides significantly improved computational efficiency and superior transfer performance across various downstream tasks, especially for classification.
26 Mar 2024


The core of video understanding tasks, such as recognition, captioning, and tracking, is to automatically detect objects or actions in a video and analyze their temporal evolution. Despite sharing a common goal, different tasks often rely on distinct model architectures and annotation formats. In contrast, natural language processing benefits from a unified output space, i.e., text sequences, which simplifies the training of powerful foundational language models, such as GPT-3, with extensive training corpora. Inspired by this, we seek to unify the output space of video understanding tasks by using languages as labels and additionally introducing time and box tokens. In this way, a variety of video tasks could be formulated as video-grounded token generation. This enables us to address various types of video tasks, including classification (such as action recognition), captioning (covering clip captioning, video question answering, and dense video captioning), and localization tasks (such as visual object tracking) within a fully shared encoder-decoder architecture, following a generative framework. Through comprehensive experiments, we demonstrate such a simple and straightforward idea is quite effective and can achieve state-of-the-art or competitive results on seven video benchmarks, providing a novel perspective for more universal video understanding. Code is available at this https URL.

29 Nov 2022

Visual Question Answering (VQA) has witnessed tremendous progress in recent years. However, most efforts only focus on the 2D image question answering tasks. In this paper, we present the first attempt at extending VQA to the 3D domain, which can facilitate artificial intelligence's perception of 3D real-world scenarios. Different from image based VQA, 3D Question Answering (3DQA) takes the color point cloud as input and requires both appearance and 3D geometry comprehension ability to answer the 3D-related questions. To this end, we propose a novel transformer-based 3DQA framework "3DQA-TR", which consists of two encoders for exploiting the appearance and geometry information, respectively. The multi-modal information of appearance, geometry, and the linguistic question can finally attend to each other via a 3D-Linguistic Bert to predict the target answers. To verify the effectiveness of our proposed 3DQA framework, we further develop the first 3DQA dataset "ScanQA", which builds on the ScanNet dataset and contains 6K questions, 30K answers for scenes. Extensive experiments on this dataset demonstrate the obvious superiority of our proposed 3DQA framework over existing VQA frameworks, and the effectiveness of our major designs. Our code and dataset will be made publicly available to facilitate the research in this direction.

31 Jul 2024
Automatic furniture layout is long desired for convenient interior design.
Leveraging the remarkable visual reasoning capabilities of multimodal large
language models (MLLMs), recent methods address layout generation in a static
manner, lacking the feedback-driven refinement essential for interactive user
engagement. We introduce Chat2Layout, a novel interactive furniture layout
generation system that extends the functionality of MLLMs into the realm of
interactive layout design. To achieve this, we establish a unified
vision-question paradigm for in-context learning, enabling seamless
communication with MLLMs to steer their behavior without altering model
weights. Within this framework, we present a novel training-free visual
prompting mechanism. This involves a visual-text prompting technique that
assist MLLMs in reasoning about plausible layout plans, followed by an
Offline-to-Online search (O2O-Search) method, which automatically identifies
the minimal set of informative references to provide exemplars for visual-text
prompting. By employing an agent system with MLLMs as the core controller, we
enable bidirectional interaction. The agent not only comprehends the 3D
environment and user requirements through linguistic and visual perception but
also plans tasks and reasons about actions to generate and arrange furniture
within the virtual space. Furthermore, the agent iteratively updates based on
visual feedback from execution results. Experimental results demonstrate that
our approach facilitates language-interactive generation and arrangement for
diverse and complex 3D furniture.

14 Jul 2022
We propose bootstrapped masked autoencoders (BootMAE), a new approach for vision BERT pretraining. BootMAE improves the original masked autoencoders (MAE) with two core designs: 1) momentum encoder that provides online feature as extra BERT prediction targets; 2) target-aware decoder that tries to reduce the pressure on the encoder to memorize target-specific information in BERT pretraining. The first design is motivated by the observation that using a pretrained MAE to extract the features as the BERT prediction target for masked tokens can achieve better pretraining performance. Therefore, we add a momentum encoder in parallel with the original MAE encoder, which bootstraps the pretraining performance by using its own representation as the BERT prediction target. In the second design, we introduce target-specific information (e.g., pixel values of unmasked patches) from the encoder directly to the decoder to reduce the pressure on the encoder of memorizing the target-specific information. Thus, the encoder focuses on semantic modeling, which is the goal of BERT pretraining, and does not need to waste its capacity in memorizing the information of unmasked tokens related to the prediction target. Through extensive experiments, our BootMAE achieves Top-1 accuracy on ImageNet-1K with ViT-B backbone, outperforming MAE by under the same pre-training epochs. BootMAE also gets mIoU improvements on semantic segmentation on ADE20K and box AP, mask AP improvement on object detection and segmentation on COCO dataset. Code is released at this https URL.

23 Aug 2023


3D Morphable Models (3DMMs) demonstrate great potential for reconstructing faithful and animatable 3D facial surfaces from a single image. The facial surface is influenced by the coarse shape, as well as the static detail (e,g., person-specific appearance) and dynamic detail (e.g., expression-driven wrinkles). Previous work struggles to decouple the static and dynamic details through image-level supervision, leading to reconstructions that are not realistic. In this paper, we aim at high-fidelity 3D face reconstruction and propose HiFace to explicitly model the static and dynamic details. Specifically, the static detail is modeled as the linear combination of a displacement basis, while the dynamic detail is modeled as the linear interpolation of two displacement maps with polarized expressions. We exploit several loss functions to jointly learn the coarse shape and fine details with both synthetic and real-world datasets, which enable HiFace to reconstruct high-fidelity 3D shapes with animatable details. Extensive quantitative and qualitative experiments demonstrate that HiFace presents state-of-the-art reconstruction quality and faithfully recovers both the static and dynamic details. Our project page can be found at this https URL.
03 Mar 2022
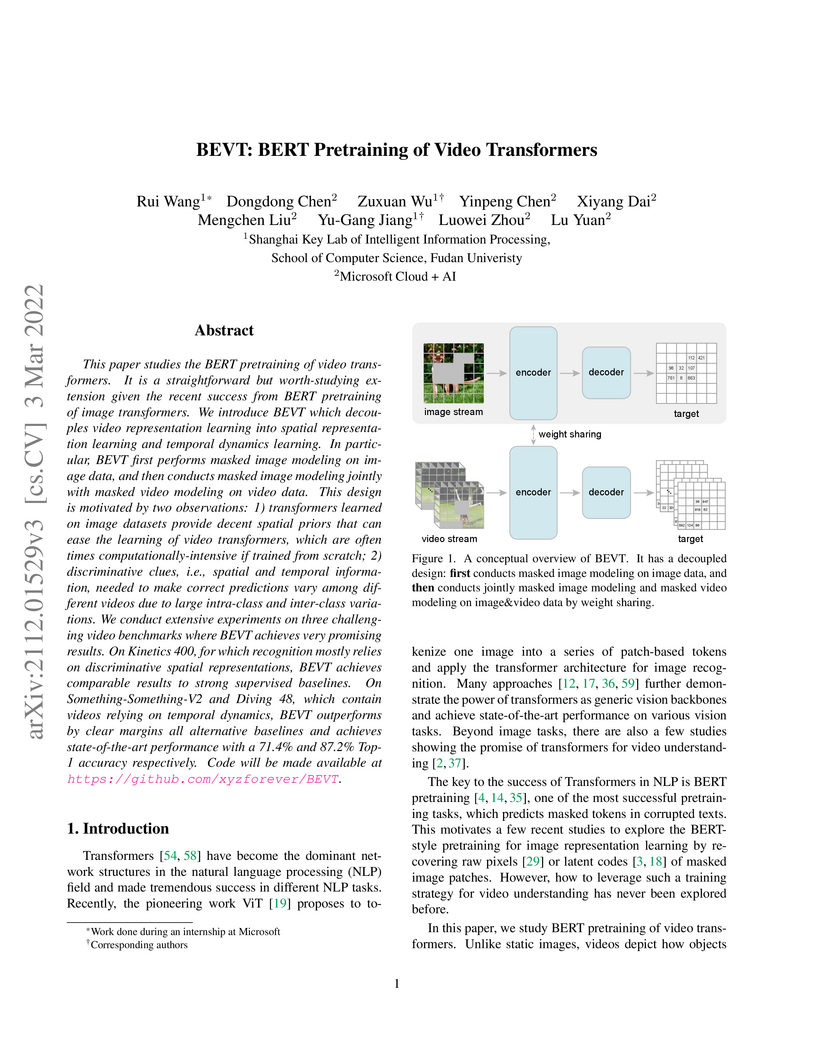
This paper presents BEVT (BERT Pretraining of Video Transformers), a self-supervised framework that extends BERT-style masked modeling to video data through a decoupled two-stream architecture. BEVT efficiently learns spatio-temporal representations by preserving spatial priors from image pretraining while simultaneously capturing temporal dynamics, achieving state-of-the-art results on several challenging video action recognition benchmarks like Something-Something-v2 and DIVING48.
31 Mar 2022

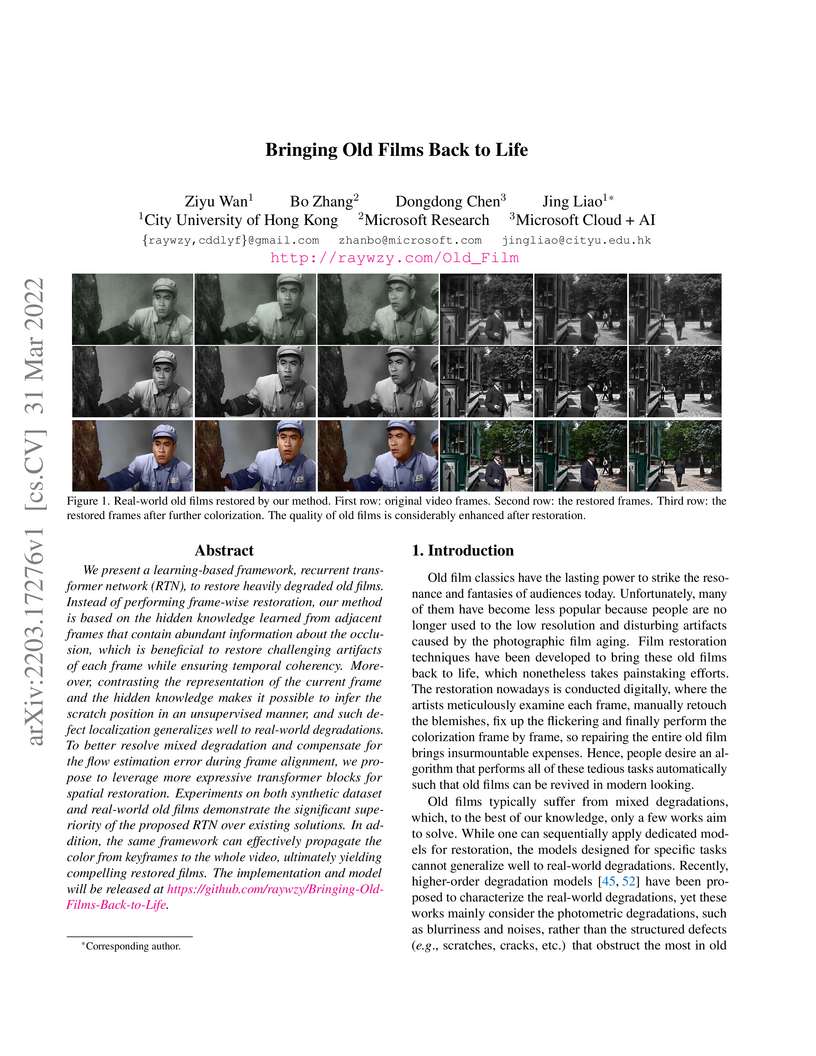
We present a learning-based framework, recurrent transformer network (RTN), to restore heavily degraded old films. Instead of performing frame-wise restoration, our method is based on the hidden knowledge learned from adjacent frames that contain abundant information about the occlusion, which is beneficial to restore challenging artifacts of each frame while ensuring temporal coherency. Moreover, contrasting the representation of the current frame and the hidden knowledge makes it possible to infer the scratch position in an unsupervised manner, and such defect localization generalizes well to real-world degradations. To better resolve mixed degradation and compensate for the flow estimation error during frame alignment, we propose to leverage more expressive transformer blocks for spatial restoration. Experiments on both synthetic dataset and real-world old films demonstrate the significant superiority of the proposed RTN over existing solutions. In addition, the same framework can effectively propagate the color from keyframes to the whole video, ultimately yielding compelling restored films. The implementation and model will be released at this https URL.
02 Mar 2022
We present CLIP-NeRF, a multi-modal 3D object manipulation method for neural radiance fields (NeRF). By leveraging the joint language-image embedding space of the recent Contrastive Language-Image Pre-Training (CLIP) model, we propose a unified framework that allows manipulating NeRF in a user-friendly way, using either a short text prompt or an exemplar image. Specifically, to combine the novel view synthesis capability of NeRF and the controllable manipulation ability of latent representations from generative models, we introduce a disentangled conditional NeRF architecture that allows individual control over both shape and appearance. This is achieved by performing the shape conditioning via applying a learned deformation field to the positional encoding and deferring color conditioning to the volumetric rendering stage. To bridge this disentangled latent representation to the CLIP embedding, we design two code mappers that take a CLIP embedding as input and update the latent codes to reflect the targeted editing. The mappers are trained with a CLIP-based matching loss to ensure the manipulation accuracy. Furthermore, we propose an inverse optimization method that accurately projects an input image to the latent codes for manipulation to enable editing on real images. We evaluate our approach by extensive experiments on a variety of text prompts and exemplar images and also provide an intuitive interface for interactive editing. Our implementation is available at this https URL
27 Jul 2021
This work introduces a comprehensive and robust Scene Graph Generation (SGG) benchmark, providing a standardized platform for evaluating SGG models across multiple datasets and architectures. Benchmarking reveals that object detection is the primary bottleneck for SGG performance and that current models heavily rely on frequency priors over learning true visual relational cues.

02 Mar 2022
The fast evolution and widespread of deepfake techniques in real-world scenarios require stronger generalization abilities of face forgery detectors. Some works capture the features that are unrelated to method-specific artifacts, such as clues of blending boundary, accumulated up-sampling, to strengthen the generalization ability. However, the effectiveness of these methods can be easily corrupted by post-processing operations such as compression. Inspired by transfer learning, neural networks pre-trained on other large-scale face-related tasks may provide useful features for deepfake detection. For example, lip movement has been proved to be a kind of robust and good-transferring highlevel semantic feature, which can be learned from the lipreading task. However, the existing method pre-trains the lip feature extraction model in a supervised manner, which requires plenty of human resources in data annotation and increases the difficulty of obtaining training data. In this paper, we propose a self-supervised transformer based audio-visual contrastive learning method. The proposed method learns mouth motion representations by encouraging the paired video and audio representations to be close while unpaired ones to be diverse. After pre-training with our method, the model will then be partially fine-tuned for deepfake detection task. Extensive experiments show that our self-supervised method performs comparably or even better than the supervised pre-training counterpart.
18 Oct 2021

Researchers from the University of Science and Technology of China and Microsoft Cloud & AI systematically address the problem of unsupervised finetuning, where pretrained models are adapted to small, unlabeled target datasets. They demonstrate that naive application of contrastive learning degrades performance and propose two strategies: Sparse Source Data Replaying and Data Mixing, which collectively achieve significant improvements in transfer accuracy, such as a 28.84 percentage point gain in 1-shot accuracy on Caltech101.
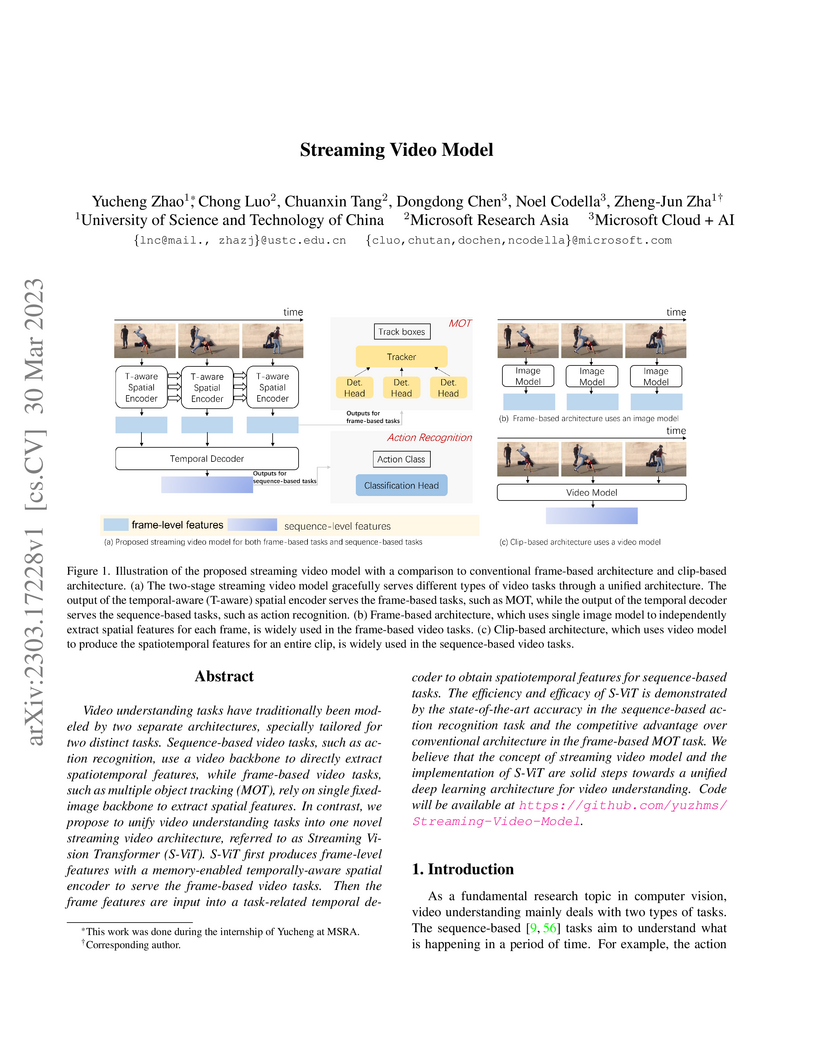
30 Mar 2023
Video understanding tasks have traditionally been modeled by two separate architectures, specially tailored for two distinct tasks. Sequence-based video tasks, such as action recognition, use a video backbone to directly extract spatiotemporal features, while frame-based video tasks, such as multiple object tracking (MOT), rely on single fixed-image backbone to extract spatial features. In contrast, we propose to unify video understanding tasks into one novel streaming video architecture, referred to as Streaming Vision Transformer (S-ViT). S-ViT first produces frame-level features with a memory-enabled temporally-aware spatial encoder to serve the frame-based video tasks. Then the frame features are input into a task-related temporal decoder to obtain spatiotemporal features for sequence-based tasks. The efficiency and efficacy of S-ViT is demonstrated by the state-of-the-art accuracy in the sequence-based action recognition task and the competitive advantage over conventional architecture in the frame-based MOT task. We believe that the concept of streaming video model and the implementation of S-ViT are solid steps towards a unified deep learning architecture for video understanding. Code will be available at this https URL.
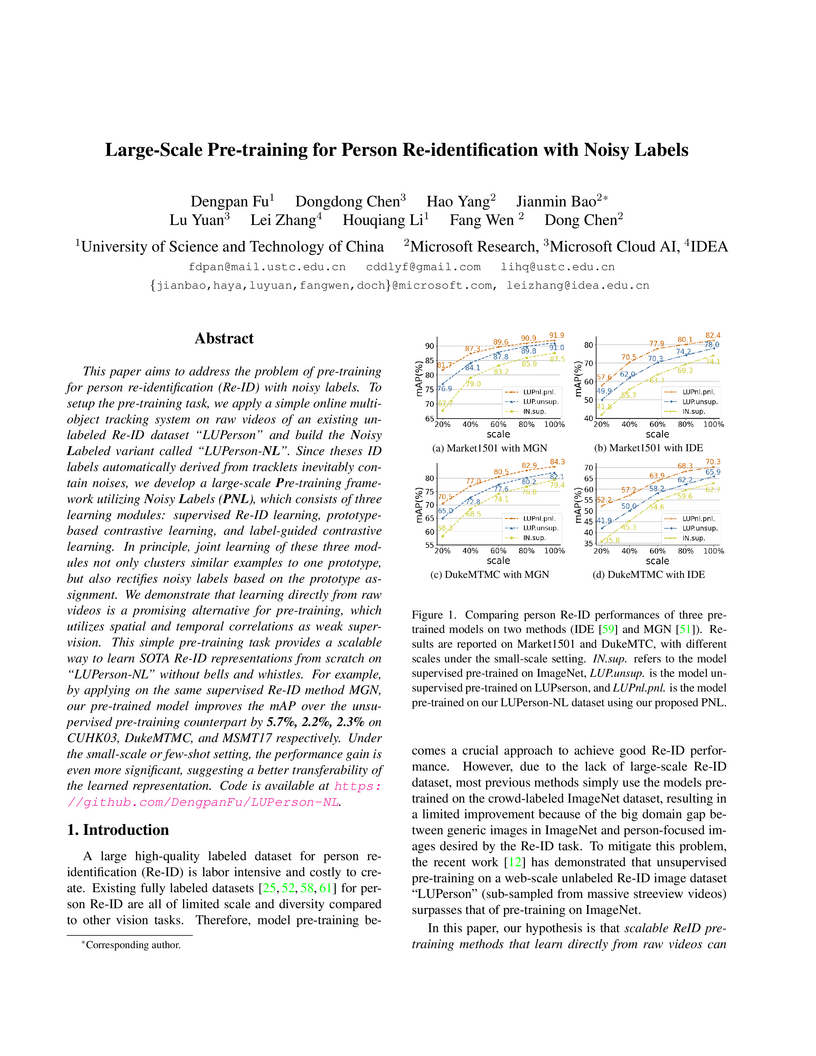
04 Apr 2022
This paper aims to address the problem of pre-training for person re-identification (Re-ID) with noisy labels. To setup the pre-training task, we apply a simple online multi-object tracking system on raw videos of an existing unlabeled Re-ID dataset "LUPerson" nd build the Noisy Labeled variant called "LUPerson-NL". Since theses ID labels automatically derived from tracklets inevitably contain noises, we develop a large-scale Pre-training framework utilizing Noisy Labels (PNL), which consists of three learning modules: supervised Re-ID learning, prototype-based contrastive learning, and label-guided contrastive learning. In principle, joint learning of these three modules not only clusters similar examples to one prototype, but also rectifies noisy labels based on the prototype assignment. We demonstrate that learning directly from raw videos is a promising alternative for pre-training, which utilizes spatial and temporal correlations as weak supervision. This simple pre-training task provides a scalable way to learn SOTA Re-ID representations from scratch on "LUPerson-NL" without bells and whistles. For example, by applying on the same supervised Re-ID method MGN, our pre-trained model improves the mAP over the unsupervised pre-training counterpart by 5.7%, 2.2%, 2.3% on CUHK03, DukeMTMC, and MSMT17 respectively. Under the small-scale or few-shot setting, the performance gain is even more significant, suggesting a better transferability of the learned representation. Code is available at this https URL
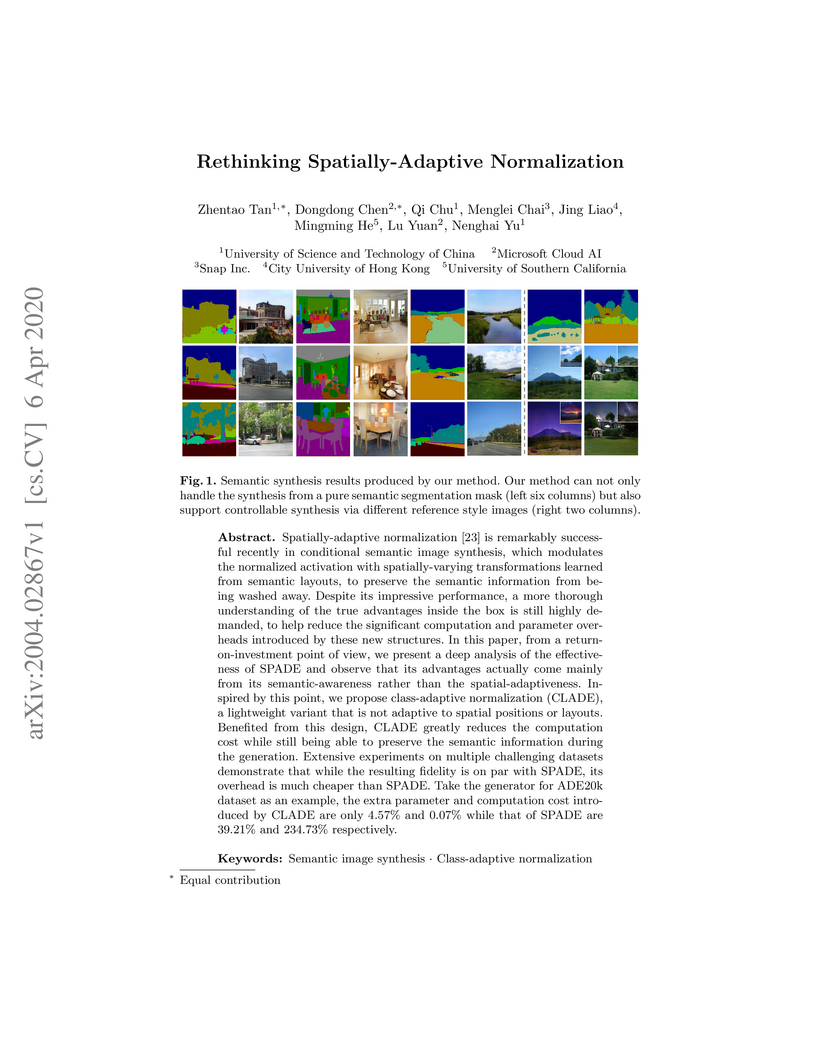
06 Apr 2020

Spatially-adaptive normalization is remarkably successful recently in
conditional semantic image synthesis, which modulates the normalized activation
with spatially-varying transformations learned from semantic layouts, to
preserve the semantic information from being washed away. Despite its
impressive performance, a more thorough understanding of the true advantages
inside the box is still highly demanded, to help reduce the significant
computation and parameter overheads introduced by these new structures. In this
paper, from a return-on-investment point of view, we present a deep analysis of
the effectiveness of SPADE and observe that its advantages actually come mainly
from its semantic-awareness rather than the spatial-adaptiveness. Inspired by
this point, we propose class-adaptive normalization (CLADE), a lightweight
variant that is not adaptive to spatial positions or layouts. Benefited from
this design, CLADE greatly reduces the computation cost while still being able
to preserve the semantic information during the generation. Extensive
experiments on multiple challenging datasets demonstrate that while the
resulting fidelity is on par with SPADE, its overhead is much cheaper than
SPADE. Take the generator for ADE20k dataset as an example, the extra parameter
and computation cost introduced by CLADE are only 4.57% and 0.07% while that of
SPADE are 39.21% and 234.73% respectively.
There are no more papers matching your filters at the moment.
