
07 Mar 2023

PaLM-E directly incorporates real-world sensor data, such as images and state estimates, into a large language model framework to enable embodied AI systems capable of understanding and interacting with their physical environment through natural language, demonstrating high success rates in robotic manipulation and state-of-the-art performance in visual question answering.
14 Jun 2021




Meta-World, an open-source benchmark featuring 50 diverse robotic manipulation tasks, provides a platform for evaluating multi-task and meta-reinforcement learning. Its evaluation shows current algorithms struggle to generalize effectively to new, distinct tasks, highlighting challenges in broad skill acquisition for robots.

26 Jul 2022
LM-Nav enables robots to follow natural language instructions in complex real-world outdoor environments by composing independently pre-trained large language, vision-language, and visual navigation models. The system successfully navigated a Clearpath Jackal UGV over 6 km, demonstrating an 80% success rate in executing diverse human commands without requiring task-specific fine-tuning or language-annotated robot data.
04 Dec 2023

Replicating human-like dexterity in robot hands represents one of the largest open problems in robotics. Reinforcement learning is a promising approach that has achieved impressive progress in the last few years; however, the class of problems it has typically addressed corresponds to a rather narrow definition of dexterity as compared to human capabilities. To address this gap, we investigate piano-playing, a skill that challenges even the human limits of dexterity, as a means to test high-dimensional control, and which requires high spatial and temporal precision, and complex finger coordination and planning. We introduce RoboPianist, a system that enables simulated anthropomorphic hands to learn an extensive repertoire of 150 piano pieces where traditional model-based optimization struggles. We additionally introduce an open-sourced environment, benchmark of tasks, interpretable evaluation metrics, and open challenges for future study. Our website featuring videos, code, and datasets is available at this https URL

13 Dec 2021
XIRL proposes a self-supervised, label-free framework that learns a vision-based reward function from unlabeled video demonstrations to enable robots to learn tasks despite stark embodiment differences. It leverages Temporal Cycle-Consistency to discover an embodiment-invariant notion of task progress, facilitating more efficient reinforcement learning without requiring human-labeled frame correspondences.

30 Aug 2020

A multi-institutional working group provides consensus recommendations to standardize Object-Goal Navigation (ObjectNav), addressing inconsistencies in task definition and evaluation. The paper precisely defines success criteria, agent embodiment parameters, and environment characteristics, culminating in concrete instantiations for the Habitat and RoboTHOR 2020 challenges.
31 Oct 2021
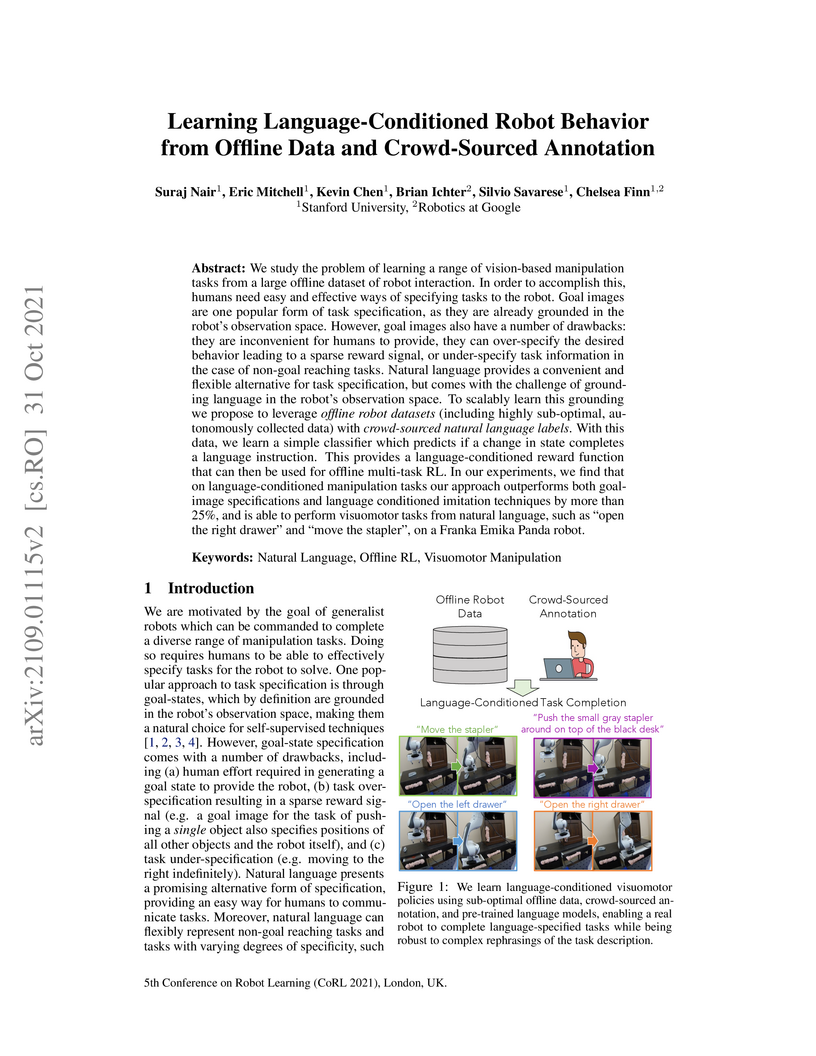
We study the problem of learning a range of vision-based manipulation tasks from a large offline dataset of robot interaction. In order to accomplish this, humans need easy and effective ways of specifying tasks to the robot. Goal images are one popular form of task specification, as they are already grounded in the robot's observation space. However, goal images also have a number of drawbacks: they are inconvenient for humans to provide, they can over-specify the desired behavior leading to a sparse reward signal, or under-specify task information in the case of non-goal reaching tasks. Natural language provides a convenient and flexible alternative for task specification, but comes with the challenge of grounding language in the robot's observation space. To scalably learn this grounding we propose to leverage offline robot datasets (including highly sub-optimal, autonomously collected data) with crowd-sourced natural language labels. With this data, we learn a simple classifier which predicts if a change in state completes a language instruction. This provides a language-conditioned reward function that can then be used for offline multi-task RL. In our experiments, we find that on language-conditioned manipulation tasks our approach outperforms both goal-image specifications and language conditioned imitation techniques by more than 25%, and is able to perform visuomotor tasks from natural language, such as "open the right drawer" and "move the stapler", on a Franka Emika Panda robot.
11 Dec 2023
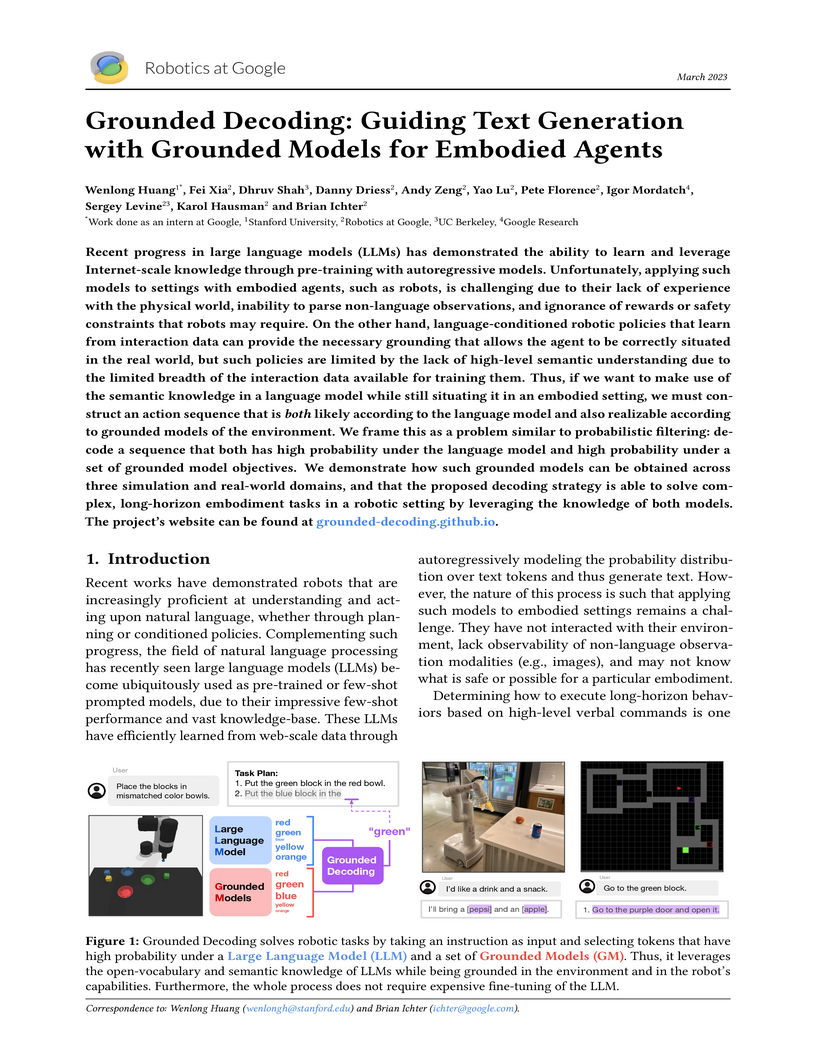
Grounded Decoding introduces a method to guide large language models in generating physically realizable plans for embodied agents by integrating token-level feedback from diverse grounded models. This approach enables robots to understand and execute complex, open-ended natural language instructions more effectively and efficiently in physical environments.
30 Jul 2020
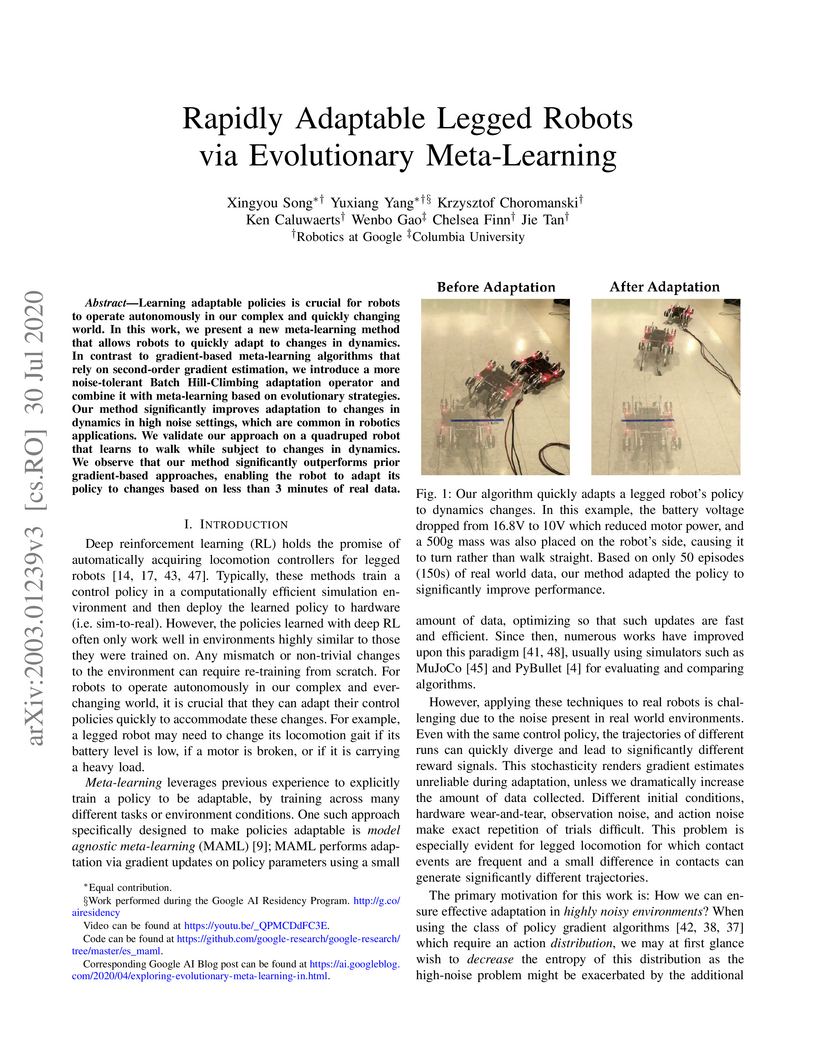
Learning adaptable policies is crucial for robots to operate autonomously in
our complex and quickly changing world. In this work, we present a new
meta-learning method that allows robots to quickly adapt to changes in
dynamics. In contrast to gradient-based meta-learning algorithms that rely on
second-order gradient estimation, we introduce a more noise-tolerant Batch
Hill-Climbing adaptation operator and combine it with meta-learning based on
evolutionary strategies. Our method significantly improves adaptation to
changes in dynamics in high noise settings, which are common in robotics
applications. We validate our approach on a quadruped robot that learns to walk
while subject to changes in dynamics. We observe that our method significantly
outperforms prior gradient-based approaches, enabling the robot to adapt its
policy to changes based on less than 3 minutes of real data.
17 Jun 2022
The use of sparse neural networks has seen rapid growth in recent years,
particularly in computer vision. Their appeal stems largely from the reduced
number of parameters required to train and store, as well as in an increase in
learning efficiency. Somewhat surprisingly, there have been very few efforts
exploring their use in Deep Reinforcement Learning (DRL). In this work we
perform a systematic investigation into applying a number of existing sparse
training techniques on a variety of DRL agents and environments. Our results
corroborate the findings from sparse training in the computer vision domain -
sparse networks perform better than dense networks for the same parameter count
- in the DRL domain. We provide detailed analyses on how the various components
in DRL are affected by the use of sparse networks and conclude by suggesting
promising avenues for improving the effectiveness of sparse training methods,
as well as for advancing their use in DRL.
14 Nov 2022

Deep reinforcement learning continues to show tremendous potential in achieving task-level autonomy, however, its computational and energy demands remain prohibitively high. In this paper, we tackle this problem by applying quantization to reinforcement learning. To that end, we introduce a novel Reinforcement Learning (RL) training paradigm, \textit{ActorQ}, to speed up actor-learner distributed RL training. \textit{ActorQ} leverages 8-bit quantized actors to speed up data collection without affecting learning convergence. Our quantized distributed RL training system, \textit{ActorQ}, demonstrates end-to-end speedups \blue{between 1.5 and 5.41}, and faster convergence over full precision training on a range of tasks (Deepmind Control Suite) and different RL algorithms (D4PG, DQN). Furthermore, we compare the carbon emissions (Kgs of CO2) of \textit{ActorQ} versus standard reinforcement learning \blue{algorithms} on various tasks. Across various settings, we show that \textit{ActorQ} enables more environmentally friendly reinforcement learning by achieving \blue{carbon emission improvements between 1.9 and 3.76} compared to training RL-agents in full-precision. We believe that this is the first of many future works on enabling computationally energy-efficient and sustainable reinforcement learning. The source code is available here for the public to use: \url{this https URL}.

14 May 2021
We present SMURF, a method for unsupervised learning of optical flow that
improves state of the art on all benchmarks by to (over the prior
best method UFlow) and even outperforms several supervised approaches such as
PWC-Net and FlowNet2. Our method integrates architecture improvements from
supervised optical flow, i.e. the RAFT model, with new ideas for unsupervised
learning that include a sequence-aware self-supervision loss, a technique for
handling out-of-frame motion, and an approach for learning effectively from
multi-frame video data while still only requiring two frames for inference.

26 Jul 2020

Mask2CAD, developed by researchers at Google AI and Technical University of Munich, accurately predicts 3D object shapes and poses from single RGB images by retrieving clean CAD models. The method achieves nearly double the APmesh compared to Mesh R-CNN on the Pix3D dataset, reaching 33.2%, and operates at 60 milliseconds per image while generalizing to unseen 3D models.

31 May 2021
SimGAN: Hybrid Simulator Identification for Domain Adaptation via Adversarial Reinforcement Learning
SimGAN: Hybrid Simulator Identification for Domain Adaptation via Adversarial Reinforcement Learning
SimGAN addresses the sim-to-real gap for robot control by identifying a hybrid physics simulator whose generated trajectories are indistinguishable from real-world data. This is achieved through an adversarial reinforcement learning framework, enabling more accurate and generalizable policy transfer while reducing the need for extensive real-world data.
03 Mar 2022
Implicit Kinematic Policies: Unifying Joint and Cartesian Action Spaces in End-to-End Robot Learning
Implicit Kinematic Policies: Unifying Joint and Cartesian Action Spaces in End-to-End Robot Learning
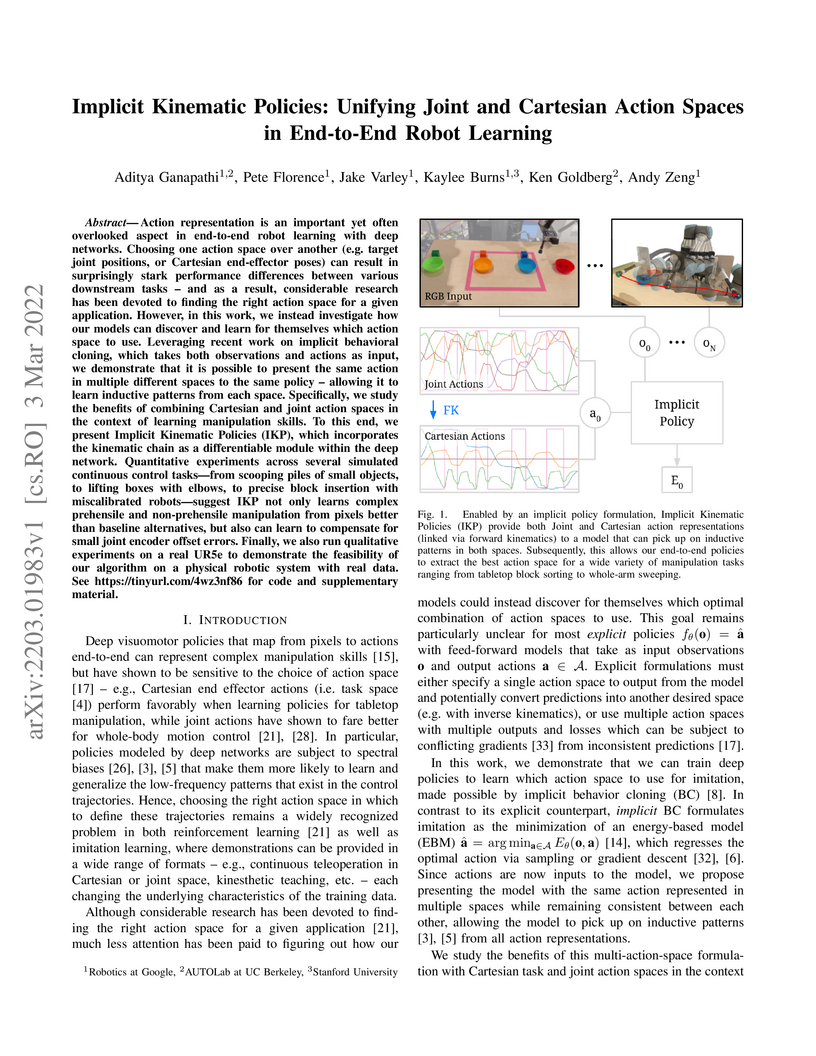
Action representation is an important yet often overlooked aspect in
end-to-end robot learning with deep networks. Choosing one action space over
another (e.g. target joint positions, or Cartesian end-effector poses) can
result in surprisingly stark performance differences between various downstream
tasks -- and as a result, considerable research has been devoted to finding the
right action space for a given application. However, in this work, we instead
investigate how our models can discover and learn for themselves which action
space to use. Leveraging recent work on implicit behavioral cloning, which
takes both observations and actions as input, we demonstrate that it is
possible to present the same action in multiple different spaces to the same
policy -- allowing it to learn inductive patterns from each space.
Specifically, we study the benefits of combining Cartesian and joint action
spaces in the context of learning manipulation skills. To this end, we present
Implicit Kinematic Policies (IKP), which incorporates the kinematic chain as a
differentiable module within the deep network. Quantitative experiments across
several simulated continuous control tasks -- from scooping piles of small
objects, to lifting boxes with elbows, to precise block insertion with
miscalibrated robots -- suggest IKP not only learns complex prehensile and
non-prehensile manipulation from pixels better than baseline alternatives, but
also can learn to compensate for small joint encoder offset errors. Finally, we
also run qualitative experiments on a real UR5e to demonstrate the feasibility
of our algorithm on a physical robotic system with real data. See
this https URL for code and supplementary material.
08 Jun 2024

A fundamental challenge in learning an unknown dynamical system is to reduce model uncertainty by making measurements while maintaining safety. We formulate a mathematical definition of what it means to safely learn a dynamical system by sequentially deciding where to initialize trajectories. The state of the system must stay within a safety region for a horizon of time steps under the action of all dynamical systems that (i) belong to a given initial uncertainty set, and (ii) are consistent with information gathered so far.
First, we consider safely learning a linear dynamical system involving states. For the case , we present an LP-based algorithm that either safely recovers the true dynamics from at most trajectories, or certifies that safe learning is impossible. For , we give an SDP representation of the set of safe initial conditions and show that trajectories generically suffice for safe learning. For , we provide SDP-representable inner approximations of the set of safe initial conditions and show that one trajectory generically suffices for safe learning. We extend a number of our results to the cases where the initial uncertainty set contains sparse, low-rank, or permutation matrices, or when the system has a control input.
Second, we consider safely learning a general class of nonlinear dynamical systems. For the case , we give an SOCP-based representation of the set of safe initial conditions. For , we provide semidefinite representable inner approximations to the set of safe initial conditions. We show how one can safely collect trajectories and fit a polynomial model of the nonlinear dynamics that is consistent with the initial uncertainty set and best agrees with the observations. We also present some extensions to cases where the measurements are noisy or the dynamical system involves disturbances.

07 Nov 2020
We present a method for jointly training the estimation of depth, ego-motion, and a dense 3D translation field of objects relative to the scene, with monocular photometric consistency being the sole source of supervision. We show that this apparently heavily underdetermined problem can be regularized by imposing the following prior knowledge about 3D translation fields: they are sparse, since most of the scene is static, and they tend to be constant for rigid moving objects. We show that this regularization alone is sufficient to train monocular depth prediction models that exceed the accuracy achieved in prior work for dynamic scenes, including methods that require semantic input. Code is at this https URL .

16 Feb 2020
The ability to walk in new scenarios is a key milestone on the path toward
real-world applications of legged robots. In this work, we introduce Meta
Strategy Optimization, a meta-learning algorithm for training policies with
latent variable inputs that can quickly adapt to new scenarios with a handful
of trials in the target environment. The key idea behind MSO is to expose the
same adaptation process, Strategy Optimization (SO), to both the training and
testing phases. This allows MSO to effectively learn locomotion skills as well
as a latent space that is suitable for fast adaptation. We evaluate our method
on a real quadruped robot and demonstrate successful adaptation in various
scenarios, including sim-to-real transfer, walking with a weakened motor, or
climbing up a slope. Furthermore, we quantitatively analyze the generalization
capability of the trained policy in simulated environments. Both real and
simulated experiments show that our method outperforms previous methods in
adaptation to novel tasks.
09 Nov 2020

Collaboration requires agents to align their goals on the fly. Underlying the human ability to align goals with other agents is their ability to predict the intentions of others and actively update their own plans. We propose hierarchical predictive planning (HPP), a model-based reinforcement learning method for decentralized multiagent rendezvous. Starting with pretrained, single-agent point to point navigation policies and using noisy, high-dimensional sensor inputs like lidar, we first learn via self-supervision motion predictions of all agents on the team. Next, HPP uses the prediction models to propose and evaluate navigation subgoals for completing the rendezvous task without explicit communication among agents. We evaluate HPP in a suite of unseen environments, with increasing complexity and numbers of obstacles. We show that HPP outperforms alternative reinforcement learning, path planning, and heuristic-based baselines on challenging, unseen environments. Experiments in the real world demonstrate successful transfer of the prediction models from sim to real world without any additional fine-tuning. Altogether, HPP removes the need for a centralized operator in multiagent systems by combining model-based RL and inference methods, enabling agents to dynamically align plans.
15 Jan 2021


We present fully autonomous source seeking onboard a highly constrained nano quadcopter, by contributing application-specific system and observation feature design to enable inference of a deep-RL policy onboard a nano quadcopter. Our deep-RL algorithm finds a high-performance solution to a challenging problem, even in presence of high noise levels and generalizes across real and simulation environments with different obstacle configurations. We verify our approach with simulation and in-field testing on a Bitcraze CrazyFlie using only the cheap and ubiquitous Cortex-M4 microcontroller unit. The results show that by end-to-end application-specific system design, our contribution consumes almost three times less additional power, as compared to competing learning-based navigation approach onboard a nano quadcopter. Thanks to our observation space, which we carefully design within the resource constraints, our solution achieves a 94% success rate in cluttered and randomized test environments, as compared to the previously achieved 80%. We also compare our strategy to a simple finite state machine (FSM), geared towards efficient exploration, and demonstrate that our policy is more robust and resilient at obstacle avoidance as well as up to 70% more efficient in source seeking. To this end, we contribute a cheap and lightweight end-to-end tiny robot learning (tinyRL) solution, running onboard a nano quadcopter, that proves to be robust and efficient in a challenging task using limited sensory input.
There are no more papers matching your filters at the moment.
