07 Oct 2025
Research and development on conversational recommender systems (CRSs) critically depends on sound and reliable evaluation methodologies. However, the interactive nature of these systems poses significant challenges for automatic evaluation. This paper critically examines current evaluation practices and identifies two key limitations: the over-reliance on static test collections and the inadequacy of existing evaluation metrics. To substantiate this critique, we analyze real user interactions with nine existing CRSs and demonstrate a striking disconnect between self-reported user satisfaction and performance scores reported in prior literature. To address these limitations, this work explores the potential of user simulation to generate dynamic interaction data, offering a departure from static datasets. Furthermore, we propose novel evaluation metrics, based on a general reward/cost framework, designed to better align with real user satisfaction. Our analysis of different simulation approaches provides valuable insights into their effectiveness and reveals promising initial results, showing improved correlation with system rankings compared to human evaluation. While these findings indicate a significant step forward in CRS evaluation, we also identify areas for future research and refinement in both simulation techniques and evaluation metrics.

29 Sep 2025
Motivated by recent work on monotone additive statistics and questions regarding optimal risk sharing for return-based risk measures, we investigate the existence, structure, and applications of Meyer risk measures. Those are monetary risk measures consistent with fractional stochastic orders suggested by Meyer (1977a,b) as refinement of second-order stochastic dominance (SSD). These so-called -SD orders are based on a threshold utility function . The test utilities defining the associated order are those at least as risk averse in absolute terms as . The generality of allows to subsume SSD and other examples from the literature. The structure of risk measures respecting the -SD order is clarified by two types of representations. The existence of nontrivial examples is more subtle: for many choices of outside the exponential (CARA) class, they do not exist. Additional properties like convexity or positive homogeneity further restrict admissible examples, even within the CARA class. We present impossibility theorems that demonstrate a deeper link between the axiomatic structure of monetary risk measures and SSD than previously acknowledged. The study concludes with two applications: portfolio optimisation under a Meyer risk measure as objective, and risk assessment of financial time series data.
03 Jul 2024
Researchers at TH Köln developed highly accurate machine learning techniques for distinguishing human-written from ChatGPT-generated Python code, achieving up to 98% detection accuracy on unseen programming tasks. Their work demonstrates that detectable stylistic differences persist even after uniform code formatting, primarily driven by subtle statistical patterns in token usage.

23 May 2025

Despite the growing interest in Explainable Artificial Intelligence (XAI),
explainability is rarely considered during hyperparameter tuning or neural
architecture optimization, where the focus remains primarily on minimizing
predictive loss. In this work, we introduce the novel concept of XAI
consistency, defined as the agreement among different feature attribution
methods, and propose new metrics to quantify it. For the first time, we
integrate XAI consistency directly into the hyperparameter tuning objective,
creating a multi-objective optimization framework that balances predictive
performance with explanation robustness. Implemented within the Sequential
Parameter Optimization Toolbox (SPOT), our approach uses both weighted
aggregation and desirability-based strategies to guide model selection. Through
our proposed framework and supporting tools, we explore the impact of
incorporating XAI consistency into the optimization process. This enables us to
characterize distinct regions in the architecture configuration space: one
region with poor performance and comparatively low interpretability, another
with strong predictive performance but weak interpretability due to low
\gls{xai} consistency, and a trade-off region that balances both objectives by
offering high interpretability alongside competitive performance. Beyond
introducing this novel approach, our research provides a foundation for future
investigations into whether models from the trade-off zone-balancing
performance loss and XAI consistency-exhibit greater robustness by avoiding
overfitting to training performance, thereby leading to more reliable
predictions on out-of-distribution data.

22 Apr 2025
In an increasingly data-driven world, the ability to understand, interpret,
and use data - data literacy - is emerging as a critical competence across all
academic disciplines. The Data Literacy Initiative (DaLI) at TH K\"oln
addresses this need by developing a comprehensive competence model for
promoting data literacy in higher education. Based on interdisciplinary
collaboration and empirical research, the DaLI model defines seven overarching
competence areas: "Establish Data Culture", "Provide Data", "Manage Data",
"Analyze Data", "Evaluate Data", "Interpret Data", and "Publish Data". Each
area is further detailed by specific competence dimensions and progression
levels, providing a structured framework for curriculum design, teaching, and
assessment. Intended for use across disciplines, the model supports the
strategic integration of data literacy into university programs. By providing a
common language and orientation for educators and institutions, the DaLI model
contributes to the broader goal of preparing students to navigate and shape a
data-informed society.

18 Dec 2019
Artificial intelligence is considered as a key technology. It has a huge impact on our society. Besides many positive effects, there are also some negative effects or threats. Some of these threats to society are well-known, e.g., weapons or killer robots. But there are also threats that are ignored. These unknown-knowns or blind spots affect privacy, and facilitate manipulation and mistaken identities. We cannot trust data, audio, video, and identities any more. Democracies are able to cope with known threats, the known-knowns. Transforming unknown-knowns to known-knowns is one important cornerstone of resilient societies. An AI-resilient society is able to transform threats caused by new AI tecchnologies such as generative adversarial networks. Resilience can be seen as a positive adaptation of these threats. We propose three strategies how this adaptation can be achieved: awareness, agreements, and red flags. This article accompanies the TEDx talk "Why we urgently need an AI-resilient society", see this https URL.
07 Jul 2025

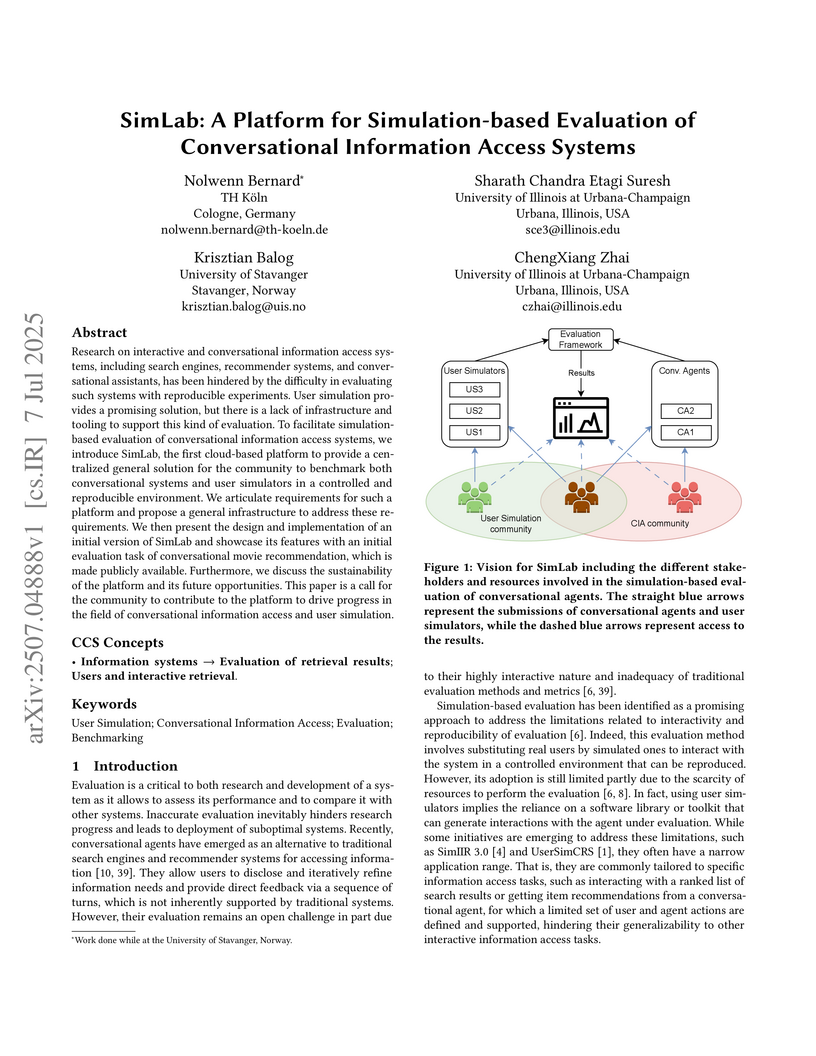
Research on interactive and conversational information access systems, including search engines, recommender systems, and conversational assistants, has been hindered by the difficulty in evaluating such systems with reproducible experiments. User simulation provides a promising solution, but there is a lack of infrastructure and tooling to support this kind of evaluation. To facilitate simulation-based evaluation of conversational information access systems, we introduce SimLab, the first cloud-based platform to provide a centralized general solution for the community to benchmark both conversational systems and user simulators in a controlled and reproducible environment. We articulate requirements for such a platform and propose a general infrastructure to address these requirements. We then present the design and implementation of an initial version of SimLab and showcase its features with an initial evaluation task of conversational movie recommendation, which is made publicly available. Furthermore, we discuss the sustainability of the platform and its future opportunities. This paper is a call for the community to contribute to the platform to drive progress in the field of conversational information access and user simulation.

18 Dec 2019
Artificial intelligence is considered as a key technology. It has a huge impact on our society. Besides many positive effects, there are also some negative effects or threats. Some of these threats to society are well-known, e.g., weapons or killer robots. But there are also threats that are ignored. These unknown-knowns or blind spots affect privacy, and facilitate manipulation and mistaken identities. We cannot trust data, audio, video, and identities any more. Democracies are able to cope with known threats, the known-knowns. Transforming unknown-knowns to known-knowns is one important cornerstone of resilient societies. An AI-resilient society is able to transform threats caused by new AI tecchnologies such as generative adversarial networks. Resilience can be seen as a positive adaptation of these threats. We propose three strategies how this adaptation can be achieved: awareness, agreements, and red flags. This article accompanies the TEDx talk "Why we urgently need an AI-resilient society", see this https URL.
17 Feb 2020
Surrogate-based optimization relies on so-called infill criteria (acquisition
functions) to decide which point to evaluate next. When Kriging is used as the
surrogate model of choice (also called Bayesian optimization), one of the most
frequently chosen criteria is expected improvement. We argue that the
popularity of expected improvement largely relies on its theoretical properties
rather than empirically validated performance. Few results from the literature
show evidence, that under certain conditions, expected improvement may perform
worse than something as simple as the predicted value of the surrogate model.
We benchmark both infill criteria in an extensive empirical study on the `BBOB'
function set. This investigation includes a detailed study of the impact of
problem dimensionality on algorithm performance. The results support the
hypothesis that exploration loses importance with increasing problem
dimensionality. A statistical analysis reveals that the purely exploitative
search with the predicted value criterion performs better on most problems of
five or higher dimensions. Possible reasons for these results are discussed. In
addition, we give an in-depth guide for choosing the infill criteria based on
prior knowledge about the problem at hand, its dimensionality, and the
available budget.

16 Dec 2020



This survey compiles ideas and recommendations from more than a dozen
researchers with different backgrounds and from different institutes around the
world. Promoting best practice in benchmarking is its main goal. The article
discusses eight essential topics in benchmarking: clearly stated goals,
well-specified problems, suitable algorithms, adequate performance measures,
thoughtful analysis, effective and efficient designs, comprehensible
presentations, and guaranteed reproducibility. The final goal is to provide
well-accepted guidelines (rules) that might be useful for authors and
reviewers. As benchmarking in optimization is an active and evolving field of
research this manuscript is meant to co-evolve over time by means of periodic
updates.

06 May 2020
Surrogate-based optimization, nature-inspired metaheuristics, and hybrid
combinations have become state of the art in algorithm design for solving
real-world optimization problems. Still, it is difficult for practitioners to
get an overview that explains their advantages in comparison to a large number
of available methods in the scope of optimization. Available taxonomies lack
the embedding of current approaches in the larger context of this broad field.
This article presents a taxonomy of the field, which explores and matches
algorithm strategies by extracting similarities and differences in their search
strategies. A particular focus lies on algorithms using surrogates,
nature-inspired designs, and those created by design optimization. The
extracted features of components or operators allow us to create a set of
classification indicators to distinguish between a small number of classes. The
features allow a deeper understanding of components of the search strategies
and further indicate the close connections between the different algorithm
designs. We present intuitive analogies to explain the basic principles of the
search algorithms, particularly useful for novices in this research field.
Furthermore, this taxonomy allows recommendations for the applicability of the
corresponding algorithms.

06 Dec 2024
In previous research, we developed methods to train decision trees (DT) as agents for reinforcement learning tasks, based on deep reinforcement learning (DRL) networks. The samples from which the DTs are built, use the environment's state as features and the corresponding action as label. To solve the nontrivial task of selecting samples, which on one hand reflect the DRL agent's capabilities of choosing the right action but on the other hand also cover enough state space to generalize well, we developed an algorithm to iteratively train DTs.
In this short paper, we apply this algorithm to a real-world implementation of a robotic task for the first time. Real-world tasks pose additional challenges compared to simulations, such as noise and delays. The task consists of a physical pendulum attached to a cart, which moves on a linear track. By movements to the left and to the right, the pendulum is to be swung in the upright position and balanced in the unstable equilibrium. Our results demonstrate the applicability of the algorithm to real-world tasks by generating a DT whose performance matches the performance of the DRL agent, while consisting of fewer parameters. This research could be a starting point for distilling DTs from DRL agents to obtain transparent, lightweight models for real-world reinforcement learning tasks.

01 Oct 2025
In this paper, we consider a finite-dimensional optimization problem minimizing a continuous objective on a compact domain subject to a multi-dimensional constraint function. For the latter, we assume the availability of a global Lipschitz constant. In recent literature, methods based on non-convex outer approximation are proposed for tackling one-dimensional equality constraints that are Lipschitz with respect to the maximum norm. To the best of our knowledge, however, there does not exist a non-convex outer approximation method for a general problem class. We introduce a meta-level solution framework to solve such problems and tackle the underlying theoretical foundations. Considering the feasible domain without the constraint function as manageable, our method relaxes the multidimensional constraint and iteratively refines the feasible region by means of norm-induced cuts, relying on an oracle for the resulting subproblems. We show the method's correctness and investigate the problem complexity. In order to account for discussions about functionality, limits, and extensions, we present computational examples including illustrations.
29 Apr 2020
Consider the following stochastic differential equation (SDE) driven by a -dimensional Lévy process . We establish conditions on the Lévy process and the drift coefficient such that the Euler--Maruyama approximation converges strongly to a solution of the SDE with an explicitly given rate. The convergence rate depends on the regularity of and the behaviour of the Lévy measure at the origin. As a by-product of the proof, we obtain that the SDE has a pathwise unique solution. Our result covers many important examples of Lévy processes, e.g. isotropic stable, relativistic stable, tempered stable and layered stable.

24 May 2023

Box-constraints limit the domain of decision variables and are common in real-world optimization problems, for example, due to physical, natural or spatial limitations. Consequently, solutions violating a box-constraint may not be evaluable. This assumption is often ignored in the literature, e.g., existing benchmark suites, such as COCO/BBOB, allow the optimizer to evaluate infeasible solutions. This paper presents an initial study on the strict-box-constrained benchmarking suite (SBOX-COST), which is a variant of the well-known BBOB benchmark suite that enforces box-constraints by returning an invalid evaluation value for infeasible solutions. Specifically, we want to understand the performance difference between BBOB and SBOX-COST as a function of two initialization methods and six constraint-handling strategies all tested with modular CMA-ES. We find that, contrary to what may be expected, handling box-constraints by saturation is not always better than not handling them at all. However, across all BBOB functions, saturation is better than not handling, and the difference increases with the number of dimensions. Strictly enforcing box-constraints also has a clear negative effect on the performance of classical CMA-ES (with uniform random initialization and no constraint handling), especially as problem dimensionality increases.

22 Jul 2019
In the last years, reinforcement learning received a lot of attention. One
method to solve reinforcement learning tasks is Neuroevolution, where neural
networks are optimized by evolutionary algorithms. A disadvantage of
Neuroevolution is that it can require numerous function evaluations, while not
fully utilizing the available information from each fitness evaluation. This is
especially problematic when fitness evaluations become expensive. To reduce the
cost of fitness evaluations, surrogate models can be employed to partially
replace the fitness function. The difficulty of surrogate modeling for
Neuroevolution is the complex search space and how to compare different
networks. To that end, recent studies showed that a kernel based approach,
particular with phenotypic distance measures, works well. These kernels compare
different networks via their behavior (phenotype) rather than their topology or
encoding (genotype). In this work, we discuss the use of surrogate model-based
Neuroevolution (SMB-NE) using a phenotypic distance for reinforcement learning.
In detail, we investigate a) the potential of SMB-NE with respect to evaluation
efficiency and b) how to select adequate input sets for the phenotypic distance
measure in a reinforcement learning problem. The results indicate that we are
able to considerably increase the evaluation efficiency using dynamic input
sets.

26 Aug 2021
False theta functions form a family of functions with intriguing modular properties and connections to mock modular forms. In this paper, we take the first step towards investigating modular transformations of higher rank false theta functions, following the example of higher depth mock modular forms. In particular, we prove that under quite general conditions, a rank two false theta function is determined in terms of iterated, holomorphic, Eichler-type integrals. This provides a new method for examining their modular properties and we apply it in a variety of situations where rank two false theta functions arise. We first consider generic parafermion characters of vertex algebras of type and . This requires a fairly non-trivial analysis of Fourier coefficients of meromorphic Jacobi forms of negative index, which is of independent interest. Then we discuss modularity of rank two false theta functions coming from superconformal Schur indices. Lastly, we analyze -invariants of Gukov, Pei, Putrov, and Vafa for certain plumbing -graphs. Along the way, our method clarifies previous results on depth two quantum modularity.
31 May 2024
Stochastic optimization algorithms have been successfully applied in several domains to find optimal solutions. Because of the ever-growing complexity of the integrated systems, novel stochastic algorithms are being proposed, which makes the task of the performance analysis of the algorithms extremely important. In this paper, we provide a novel ranking scheme to rank the algorithms over multiple single-objective optimization problems. The results of the algorithms are compared using a robust bootstrapping-based hypothesis testing procedure that is based on the principles of severity. Analogous to the football league scoring scheme, we propose pairwise comparison of algorithms as in league competition. Each algorithm accumulates points and a performance metric of how good or bad it performed against other algorithms analogous to goal differences metric in football league scoring system. The goal differences performance metric can not only be used as a tie-breaker but also be used to obtain a quantitative performance of each algorithm. The key novelty of the proposed ranking scheme is that it takes into account the performance of each algorithm considering the magnitude of the achieved performance improvement along with its practical relevance and does not have any distributional assumptions. The proposed ranking scheme is compared to classical hypothesis testing and the analysis of the results shows that the results are comparable and our proposed ranking showcases many additional benefits.
28 Jun 2018

Contemporary web pages with increasingly sophisticated interfaces rival
traditional desktop applications for interface complexity and are often called
web applications or RIA (Rich Internet Applications). They often require the
execution of JavaScript in a web browser and can call AJAX requests to
dynamically generate the content, reacting to user interaction. From the
automatic data acquisition point of view, thus, it is essential to be able to
correctly render web pages and mimic user actions to obtain relevant data from
the web page content. Briefly, to obtain data through existing Web interfaces
and transform it into structured form, contemporary wrappers should be able to:
1) interact with sophisticated interfaces of web applications; 2) precisely
acquire relevant data; 3) scale with the number of crawled web pages or states
of web application; 4) have an embeddable programming API for integration with
existing web technologies. OXPath is a state-of-the-art technology, which is
compliant with these requirements and demonstrated its efficiency in
comprehensive experiments. OXPath integrates Firefox for correct rendering of
web pages and extends XPath 1.0 for the DOM node selection, interaction, and
extraction. It provides means for converting extracted data into different
formats, such as XML, JSON, CSV, and saving data into relational databases.
This tutorial explains main features of the OXPath language and the setup of
a suitable working environment. The guidelines for using OXPath are provided in
the form of prototypical examples.

01 Jul 2024
Information retrieval systems have been evaluated using the Cranfield paradigm for many years. This paradigm allows a systematic, fair, and reproducible evaluation of different retrieval methods in fixed experimental environments. However, real-world retrieval systems must cope with dynamic environments and temporal changes that affect the document collection, topical trends, and the individual user's perception of what is considered relevant. Yet, the temporal dimension in IR evaluations is still understudied.
To this end, this work investigates how the temporal generalizability of effectiveness evaluations can be assessed. As a conceptual model, we generalize Cranfield-type experiments to the temporal context by classifying the change in the essential components according to the create, update, and delete operations of persistent storage known from CRUD. From the different types of change different evaluation scenarios are derived and it is outlined what they imply. Based on these scenarios, renowned state-of-the-art retrieval systems are tested and it is investigated how the retrieval effectiveness changes on different levels of granularity.
We show that the proposed measures can be well adapted to describe the changes in the retrieval results. The experiments conducted confirm that the retrieval effectiveness strongly depends on the evaluation scenario investigated. We find that not only the average retrieval performance of single systems but also the relative system performance are strongly affected by the components that change and to what extent these components changed.
There are no more papers matching your filters at the moment.
