29 Jun 2025

Researchers from Technion, MILA Institute, and NVIDIA Research formally demonstrate that state entropy regularization provides unique robustness guarantees against structured and spatially correlated perturbations in reinforcement learning, contrasting with policy entropy's protection against local changes. Their work provides theoretical characterizations of induced uncertainty sets and shows state entropy's empirical superiority in environments with global disruptions.

05 Aug 2025


Morphology-aware policy learning is a means of enhancing policy sample efficiency by aggregating data from multiple agents. These types of policies have previously been shown to help generalize over dynamic, kinematic, and limb configuration variations between agent morphologies. Unfortunately, these policies still have sub-optimal zero-shot performance compared to end-to-end finetuning on morphologies at deployment. This limitation has ramifications in practical applications such as robotics because further data collection to perform end-to-end finetuning can be computationally expensive. In this work, we investigate combining morphology-aware pretraining with parameter efficient finetuning (PEFT) techniques to help reduce the learnable parameters necessary to specialize a morphology-aware policy to a target embodiment. We compare directly tuning sub-sets of model weights, input learnable adapters, and prefix tuning techniques for online finetuning. Our analysis reveals that PEFT techniques in conjunction with policy pre-training generally help reduce the number of samples to necessary to improve a policy compared to training models end-to-end from scratch. We further find that tuning as few as less than 1% of total parameters will improve policy performance compared the zero-shot performance of the base pretrained a policy.

01 Apr 2025

Generative AI has the potential to transform personalization and
accessibility of education. However, it raises serious concerns about accuracy
and helping students become independent critical thinkers. In this study, we
designed a helpful AI "Peer" to help students correct fundamental physics
misconceptions related to Newtonian mechanic concepts. In contrast to
approaches that seek near-perfect accuracy to create an authoritative AI tutor
or teacher, we directly inform students that this AI can answer up to 40% of
questions incorrectly. In a randomized controlled trial with 165 students,
those who engaged in targeted dialogue with the AI Peer achieved post-test
scores that were, on average, 10.5 percentage points higher - with over 20
percentage points higher normalized gain - than a control group that discussed
physics history. Qualitative feedback indicated that 91% of the treatment
group's AI interactions were rated as helpful. Furthermore, by comparing
student performance on pre- and post-test questions about the same concept,
along with experts' annotations of the AI interactions, we find initial
evidence suggesting the improvement in performance does not depend on the
correctness of the AI. With further research, the AI Peer paradigm described
here could open new possibilities for how we learn, adapt to, and grow with AI.
10 Dec 2025

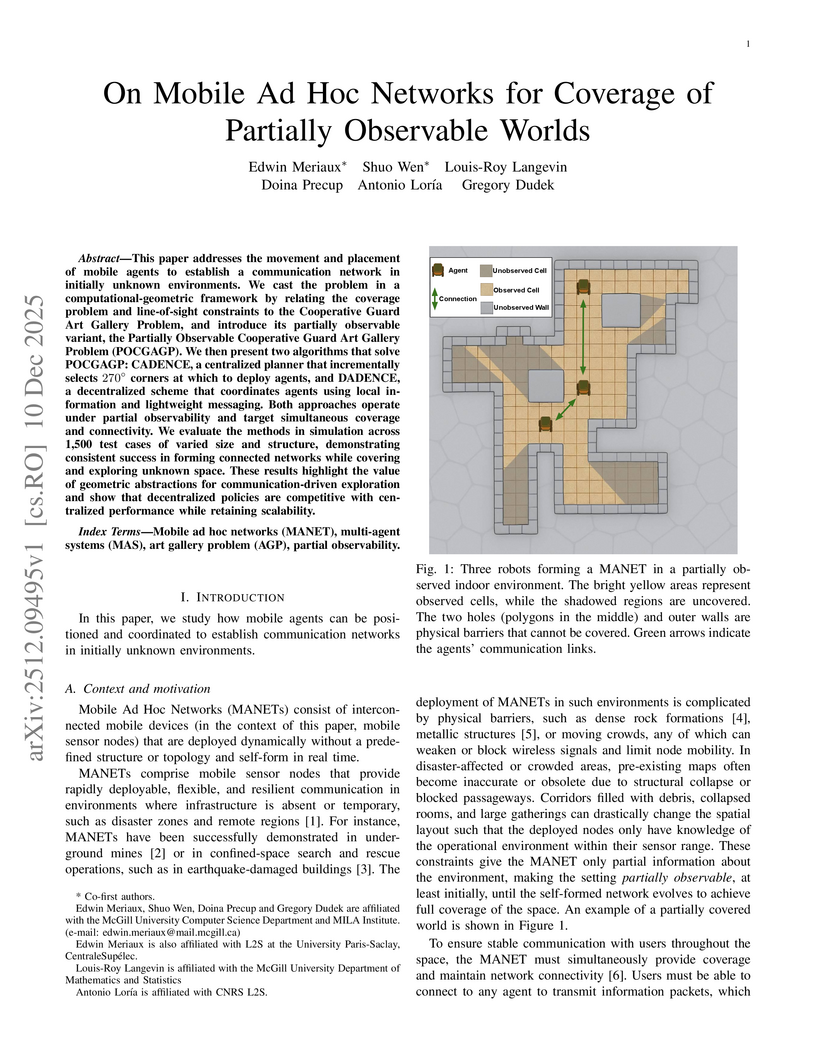
This paper addresses the movement and placement of mobile agents to establish a communication network in initially unknown environments. We cast the problem in a computational-geometric framework by relating the coverage problem and line-of-sight constraints to the Cooperative Guard Art Gallery Problem, and introduce its partially observable variant, the Partially Observable Cooperative Guard Art Gallery Problem (POCGAGP). We then present two algorithms that solve POCGAGP: CADENCE, a centralized planner that incrementally selects 270 degree corners at which to deploy agents, and DADENCE, a decentralized scheme that coordinates agents using local information and lightweight messaging. Both approaches operate under partial observability and target simultaneous coverage and connectivity. We evaluate the methods in simulation across 1,500 test cases of varied size and structure, demonstrating consistent success in forming connected networks while covering and exploring unknown space. These results highlight the value of geometric abstractions for communication-driven exploration and show that decentralized policies are competitive with centralized performance while retaining scalability.

09 Jan 2024
We propose Guided Positive Sampling Self-Supervised Learning (GPS-SSL), a general method to inject a priori knowledge into Self-Supervised Learning (SSL) positive samples selection. Current SSL methods leverage Data-Augmentations (DA) for generating positive samples and incorporate prior knowledge - an incorrect, or too weak DA will drastically reduce the quality of the learned representation. GPS-SSL proposes instead to design a metric space where Euclidean distances become a meaningful proxy for semantic relationship. In that space, it is now possible to generate positive samples from nearest neighbor sampling. Any prior knowledge can now be embedded into that metric space independently from the employed DA. From its simplicity, GPS-SSL is applicable to any SSL method, e.g. SimCLR or BYOL. A key benefit of GPS-SSL is in reducing the pressure in tailoring strong DAs. For example GPS-SSL reaches 85.58% on Cifar10 with weak DA while the baseline only reaches 37.51%. We therefore move a step forward towards the goal of making SSL less reliant on DA. We also show that even when using strong DAs, GPS-SSL outperforms the baselines on under-studied domains. We evaluate GPS-SSL along with multiple baseline SSL methods on numerous downstream datasets from different domains when the models use strong or minimal data augmentations. We hope that GPS-SSL will open new avenues in studying how to inject a priori knowledge into SSL in a principled manner.

25 Aug 2023
A large number of studies on social media compare the behaviour of users from
different political parties. As a basic step, they employ a predictive model
for inferring their political affiliation. The accuracy of this model can
change the conclusions of a downstream analysis significantly, yet the choice
between different models seems to be made arbitrarily. In this paper, we
provide a comprehensive survey and an empirical comparison of the current party
prediction practices and propose several new approaches which are competitive
with or outperform state-of-the-art methods, yet require less computational
resources. Party prediction models rely on the content generated by the users
(e.g., tweet texts), the relations they have (e.g., who they follow), or their
activities and interactions (e.g., which tweets they like). We examine all of
these and compare their signal strength for the party prediction task. This
paper lets the practitioner select from a wide range of data types that all
give strong performance. Finally, we conduct extensive experiments on different
aspects of these methods, such as data collection speed and transfer
capabilities, which can provide further insights for both applied and
methodological research.
20 Jul 2022
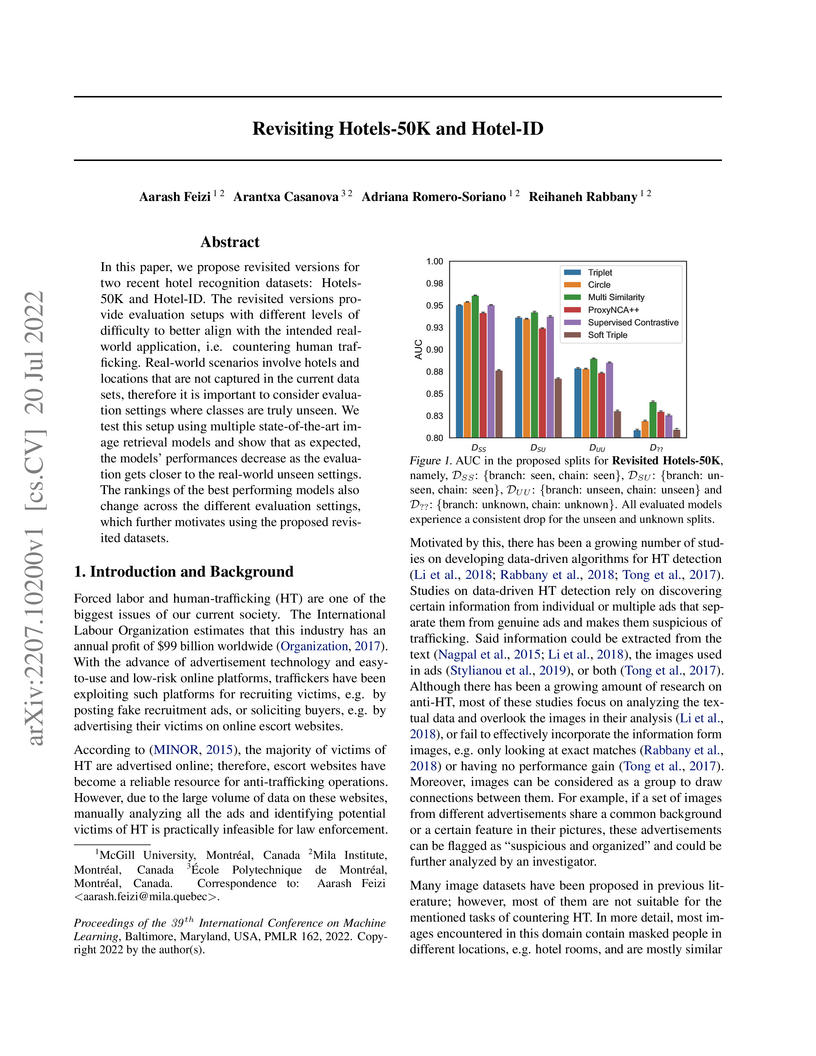
In this paper, we propose revisited versions for two recent hotel recognition
datasets: Hotels50K and Hotel-ID. The revisited versions provide evaluation
setups with different levels of difficulty to better align with the intended
real-world application, i.e. countering human trafficking. Real-world scenarios
involve hotels and locations that are not captured in the current data sets,
therefore it is important to consider evaluation settings where classes are
truly unseen. We test this setup using multiple state-of-the-art image
retrieval models and show that as expected, the models' performances decrease
as the evaluation gets closer to the real-world unseen settings. The rankings
of the best performing models also change across the different evaluation
settings, which further motivates using the proposed revisited datasets.

20 Jun 2022

We present a solver for Mixed Integer Programs (MIP) developed for the MIP
competition 2022. Given the 10 minutes bound on the computational time
established by the rules of the competition, our method focuses on finding a
feasible solution and improves it through a Branch-and-Bound algorithm. Another
rule of the competition allows the use of up to 8 threads. Each thread is given
a different primal heuristic, which has been tuned by hyper-parameters, to find
a feasible solution. In every thread, once a feasible solution is found, we
stop and we use a Branch-and-Bound method, embedded with local search
heuristics, to ameliorate the incumbent solution. The three variants of the
Diving heuristic that we implemented manage to find a feasible solution for 10
instances of the training data set. These heuristics are the best performing
among the heuristics that we implemented. Our Branch-and-Bound algorithm is
effective on a small portion of the training data set, and it manages to find
an incumbent feasible solution for an instance that we could not solve with the
Diving heuristics. Overall, our combined methods, when implemented with
extensive computational power, can solve 11 of the 19 problems of the training
data set within the time limit. Our submission to the MIP competition was
awarded the "Outstanding Student Submission" honorable mention.
There are no more papers matching your filters at the moment.
