12 Oct 2021


Growing at a fast pace, modern autonomous systems will soon be deployed at
scale, opening up the possibility for cooperative multi-agent systems. Sharing
information and distributing workloads allow autonomous agents to better
perform tasks and increase computation efficiency. However, shared information
can be modified to execute adversarial attacks on deep learning models that are
widely employed in modern systems. Thus, we aim to study the robustness of such
systems and focus on exploring adversarial attacks in a novel multi-agent
setting where communication is done through sharing learned intermediate
representations of neural networks. We observe that an indistinguishable
adversarial message can severely degrade performance, but becomes weaker as the
number of benign agents increases. Furthermore, we show that black-box transfer
attacks are more difficult in this setting when compared to directly perturbing
the inputs, as it is necessary to align the distribution of learned
representations with domain adaptation. Our work studies robustness at the
neural network level to contribute an additional layer of fault tolerance to
modern security protocols for more secure multi-agent systems.
13 Dec 2020


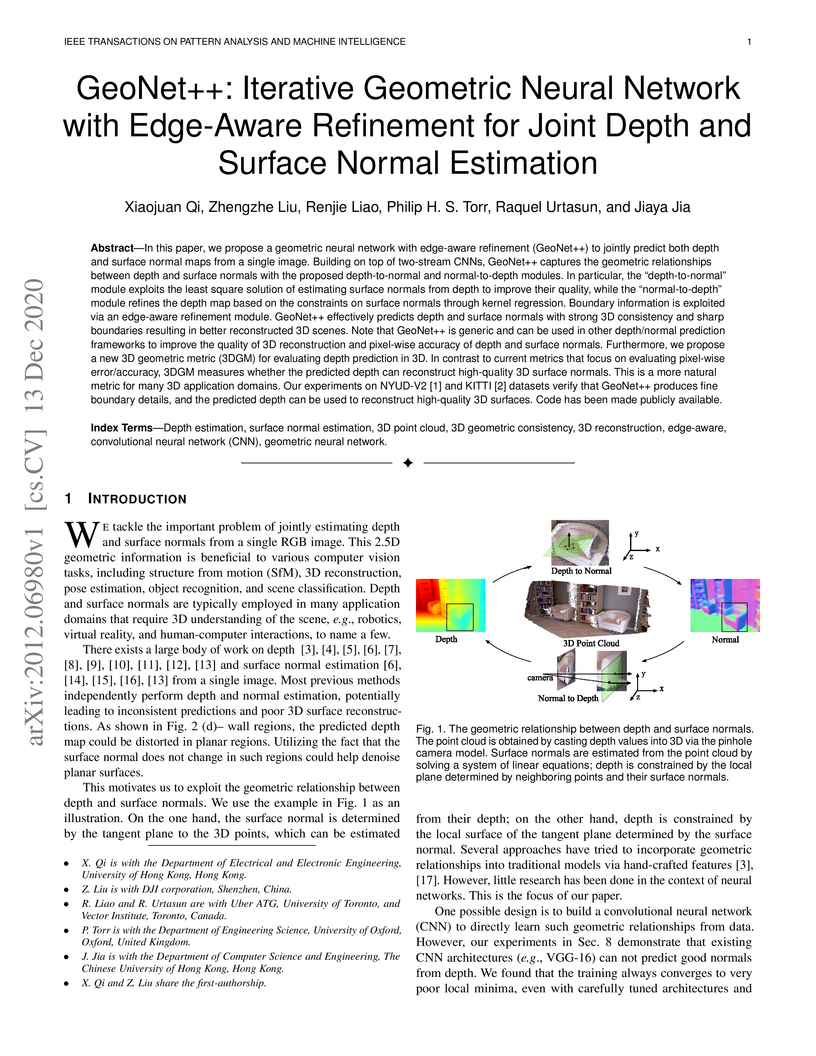
In this paper, we propose a geometric neural network with edge-aware
refinement (GeoNet++) to jointly predict both depth and surface normal maps
from a single image. Building on top of two-stream CNNs, GeoNet++ captures the
geometric relationships between depth and surface normals with the proposed
depth-to-normal and normal-to-depth modules. In particular, the
"depth-to-normal" module exploits the least square solution of estimating
surface normals from depth to improve their quality, while the
"normal-to-depth" module refines the depth map based on the constraints on
surface normals through kernel regression. Boundary information is exploited
via an edge-aware refinement module. GeoNet++ effectively predicts depth and
surface normals with strong 3D consistency and sharp boundaries resulting in
better reconstructed 3D scenes. Note that GeoNet++ is generic and can be used
in other depth/normal prediction frameworks to improve the quality of 3D
reconstruction and pixel-wise accuracy of depth and surface normals.
Furthermore, we propose a new 3D geometric metric (3DGM) for evaluating depth
prediction in 3D. In contrast to current metrics that focus on evaluating
pixel-wise error/accuracy, 3DGM measures whether the predicted depth can
reconstruct high-quality 3D surface normals. This is a more natural metric for
many 3D application domains. Our experiments on NYUD-V2 and KITTI datasets
verify that GeoNet++ produces fine boundary details, and the predicted depth
can be used to reconstruct high-quality 3D surfaces. Code has been made
publicly available.
07 Jan 2022


Modern self-driving perception systems have been shown to improve upon
processing complementary inputs such as LiDAR with images. In isolation, 2D
images have been found to be extremely vulnerable to adversarial attacks. Yet,
there have been limited studies on the adversarial robustness of multi-modal
models that fuse LiDAR features with image features. Furthermore, existing
works do not consider physically realizable perturbations that are consistent
across the input modalities. In this paper, we showcase practical
susceptibilities of multi-sensor detection by placing an adversarial object on
top of a host vehicle. We focus on physically realizable and input-agnostic
attacks as they are feasible to execute in practice, and show that a single
universal adversary can hide different host vehicles from state-of-the-art
multi-modal detectors. Our experiments demonstrate that successful attacks are
primarily caused by easily corrupted image features. Furthermore, we find that
in modern sensor fusion methods which project image features into 3D,
adversarial attacks can exploit the projection process to generate false
positives across distant regions in 3D. Towards more robust multi-modal
perception systems, we show that adversarial training with feature denoising
can boost robustness to such attacks significantly. However, we find that
standard adversarial defenses still struggle to prevent false positives which
are also caused by inaccurate associations between 3D LiDAR points and 2D
pixels.
16 Apr 2023

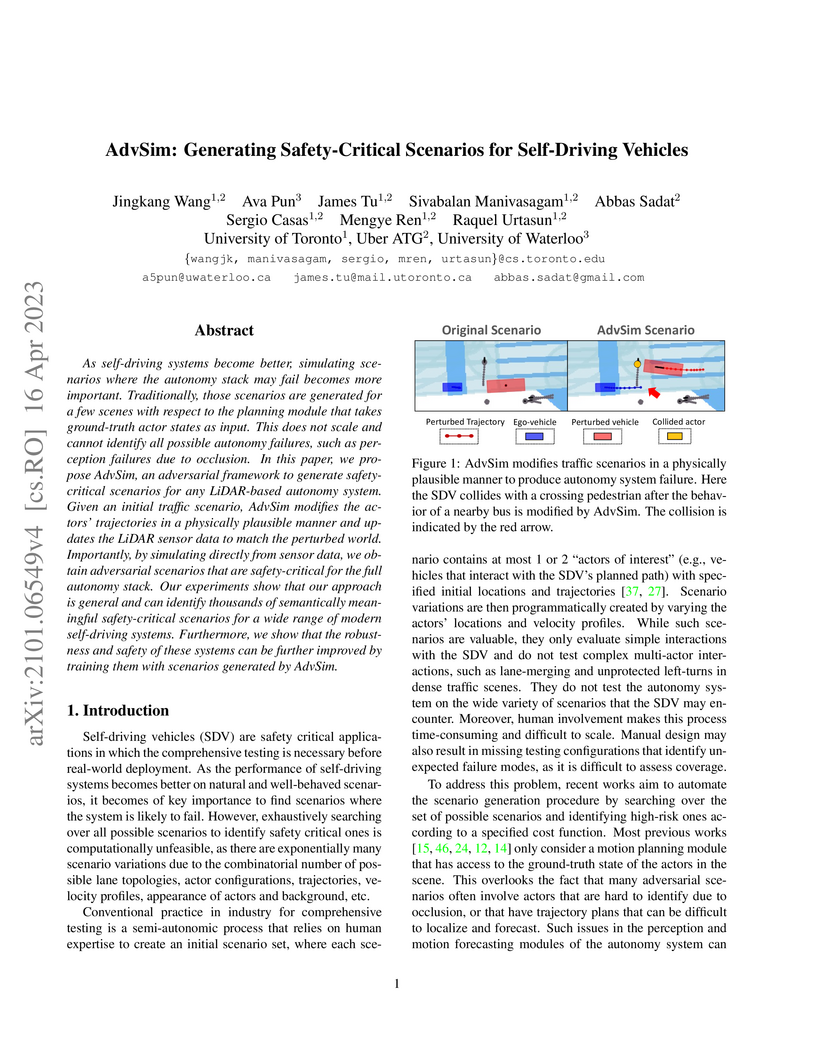
As self-driving systems become better, simulating scenarios where the autonomy stack may fail becomes more important. Traditionally, those scenarios are generated for a few scenes with respect to the planning module that takes ground-truth actor states as input. This does not scale and cannot identify all possible autonomy failures, such as perception failures due to occlusion. In this paper, we propose AdvSim, an adversarial framework to generate safety-critical scenarios for any LiDAR-based autonomy system. Given an initial traffic scenario, AdvSim modifies the actors' trajectories in a physically plausible manner and updates the LiDAR sensor data to match the perturbed world. Importantly, by simulating directly from sensor data, we obtain adversarial scenarios that are safety-critical for the full autonomy stack. Our experiments show that our approach is general and can identify thousands of semantically meaningful safety-critical scenarios for a wide range of modern self-driving systems. Furthermore, we show that the robustness and safety of these systems can be further improved by training them with scenarios generated by AdvSim.
03 Apr 2019
In this paper, we propose a unified panoptic segmentation network (UPSNet) for tackling the newly proposed panoptic segmentation task. On top of a single backbone residual network, we first design a deformable convolution based semantic segmentation head and a Mask R-CNN style instance segmentation head which solve these two subtasks simultaneously. More importantly, we introduce a parameter-free panoptic head which solves the panoptic segmentation via pixel-wise classification. It first leverages the logits from the previous two heads and then innovatively expands the representation for enabling prediction of an extra unknown class which helps better resolve the conflicts between semantic and instance segmentation. Additionally, it handles the challenge caused by the varying number of instances and permits back propagation to the bottom modules in an end-to-end manner. Extensive experimental results on Cityscapes, COCO and our internal dataset demonstrate that our UPSNet achieves state-of-the-art performance with much faster inference. Code has been made available at: this https URL
07 May 2019



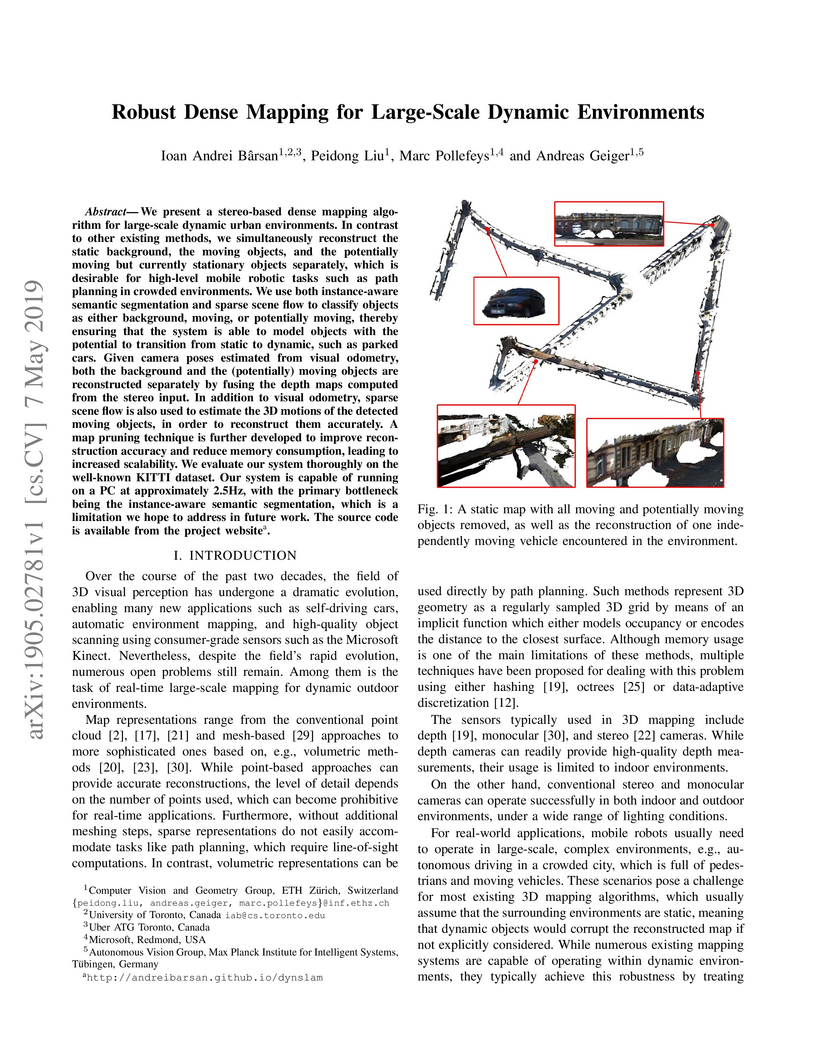
We present a stereo-based dense mapping algorithm for large-scale dynamic
urban environments. In contrast to other existing methods, we simultaneously
reconstruct the static background, the moving objects, and the potentially
moving but currently stationary objects separately, which is desirable for
high-level mobile robotic tasks such as path planning in crowded environments.
We use both instance-aware semantic segmentation and sparse scene flow to
classify objects as either background, moving, or potentially moving, thereby
ensuring that the system is able to model objects with the potential to
transition from static to dynamic, such as parked cars. Given camera poses
estimated from visual odometry, both the background and the (potentially)
moving objects are reconstructed separately by fusing the depth maps computed
from the stereo input. In addition to visual odometry, sparse scene flow is
also used to estimate the 3D motions of the detected moving objects, in order
to reconstruct them accurately. A map pruning technique is further developed to
improve reconstruction accuracy and reduce memory consumption, leading to
increased scalability. We evaluate our system thoroughly on the well-known
KITTI dataset. Our system is capable of running on a PC at approximately 2.5Hz,
with the primary bottleneck being the instance-aware semantic segmentation,
which is a limitation we hope to address in future work. The source code is
available from the project website (this http URL).

30 Jun 2020

In most practical settings and theoretical analyses, one assumes that a model
can be trained until convergence. However, the growing complexity of machine
learning datasets and models may violate such assumptions. Indeed, current
approaches for hyper-parameter tuning and neural architecture search tend to be
limited by practical resource constraints. Therefore, we introduce a formal
setting for studying training under the non-asymptotic, resource-constrained
regime, i.e., budgeted training. We analyze the following problem: "given a
dataset, algorithm, and fixed resource budget, what is the best achievable
performance?" We focus on the number of optimization iterations as the
representative resource. Under such a setting, we show that it is critical to
adjust the learning rate schedule according to the given budget. Among
budget-aware learning schedules, we find simple linear decay to be both robust
and high-performing. We support our claim through extensive experiments with
state-of-the-art models on ImageNet (image classification), Kinetics (video
classification), MS COCO (object detection and instance segmentation), and
Cityscapes (semantic segmentation). We also analyze our results and find that
the key to a good schedule is budgeted convergence, a phenomenon whereby the
gradient vanishes at the end of each allowed budget. We also revisit existing
approaches for fast convergence and show that budget-aware learning schedules
readily outperform such approaches under (the practical but under-explored)
budgeted training setting.
07 May 2021

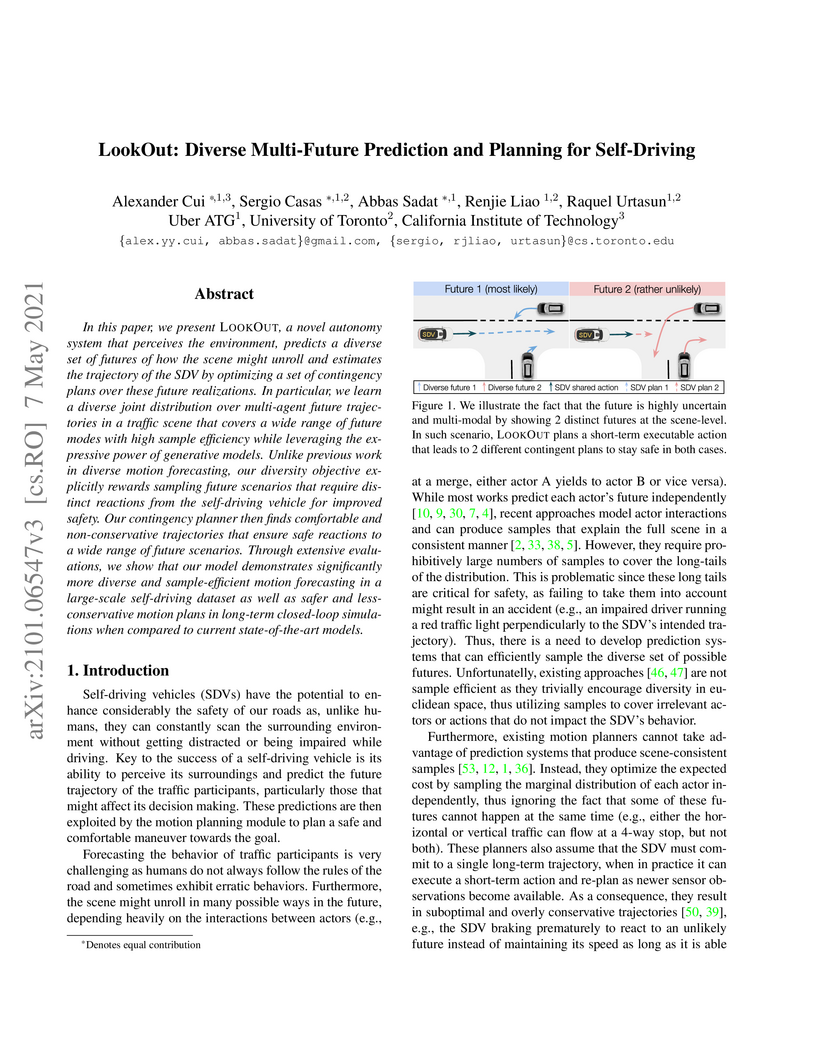
In this paper, we present LookOut, a novel autonomy system that perceives the environment, predicts a diverse set of futures of how the scene might unroll and estimates the trajectory of the SDV by optimizing a set of contingency plans over these future realizations. In particular, we learn a diverse joint distribution over multi-agent future trajectories in a traffic scene that covers a wide range of future modes with high sample efficiency while leveraging the expressive power of generative models. Unlike previous work in diverse motion forecasting, our diversity objective explicitly rewards sampling future scenarios that require distinct reactions from the self-driving vehicle for improved safety. Our contingency planner then finds comfortable and non-conservative trajectories that ensure safe reactions to a wide range of future scenarios. Through extensive evaluations, we show that our model demonstrates significantly more diverse and sample-efficient motion forecasting in a large-scale self-driving dataset as well as safer and less-conservative motion plans in long-term closed-loop simulations when compared to current state-of-the-art models.

29 Nov 2020
Deep neural nets typically perform end-to-end backpropagation to learn the
weights, a procedure that creates synchronization constraints in the weight
update step across layers and is not biologically plausible. Recent advances in
unsupervised contrastive representation learning point to the question of
whether a learning algorithm can also be made local, that is, the updates of
lower layers do not directly depend on the computation of upper layers. While
Greedy InfoMax separately learns each block with a local objective, we found
that it consistently hurts readout accuracy in state-of-the-art unsupervised
contrastive learning algorithms, possibly due to the greedy objective as well
as gradient isolation. In this work, we discover that by overlapping local
blocks stacking on top of each other, we effectively increase the decoder depth
and allow upper blocks to implicitly send feedbacks to lower blocks. This
simple design closes the performance gap between local learning and end-to-end
contrastive learning algorithms for the first time. Aside from standard
ImageNet experiments, we also show results on complex downstream tasks such as
object detection and instance segmentation directly using readout features.

08 Apr 2021

Self-driving vehicles must perceive and predict the future positions of
nearby actors in order to avoid collisions and drive safely. A learned deep
learning module is often responsible for this task, requiring large-scale,
high-quality training datasets. As data collection is often significantly
cheaper than labeling in this domain, the decision of which subset of examples
to label can have a profound impact on model performance. Active learning
techniques, which leverage the state of the current model to iteratively select
examples for labeling, offer a promising solution to this problem. However,
despite the appeal of this approach, there has been little scientific analysis
of active learning approaches for the perception and prediction (P&P) problem.
In this work, we study active learning techniques for P&P and find that the
traditional active learning formulation is ill-suited for the P&P setting. We
thus introduce generalizations that ensure that our approach is both cost-aware
and allows for fine-grained selection of examples through partially labeled
scenes. Our experiments on a real-world, large-scale self-driving dataset
suggest that fine-grained selection can improve the performance across
perception, prediction, and downstream planning tasks.
26 Oct 2018
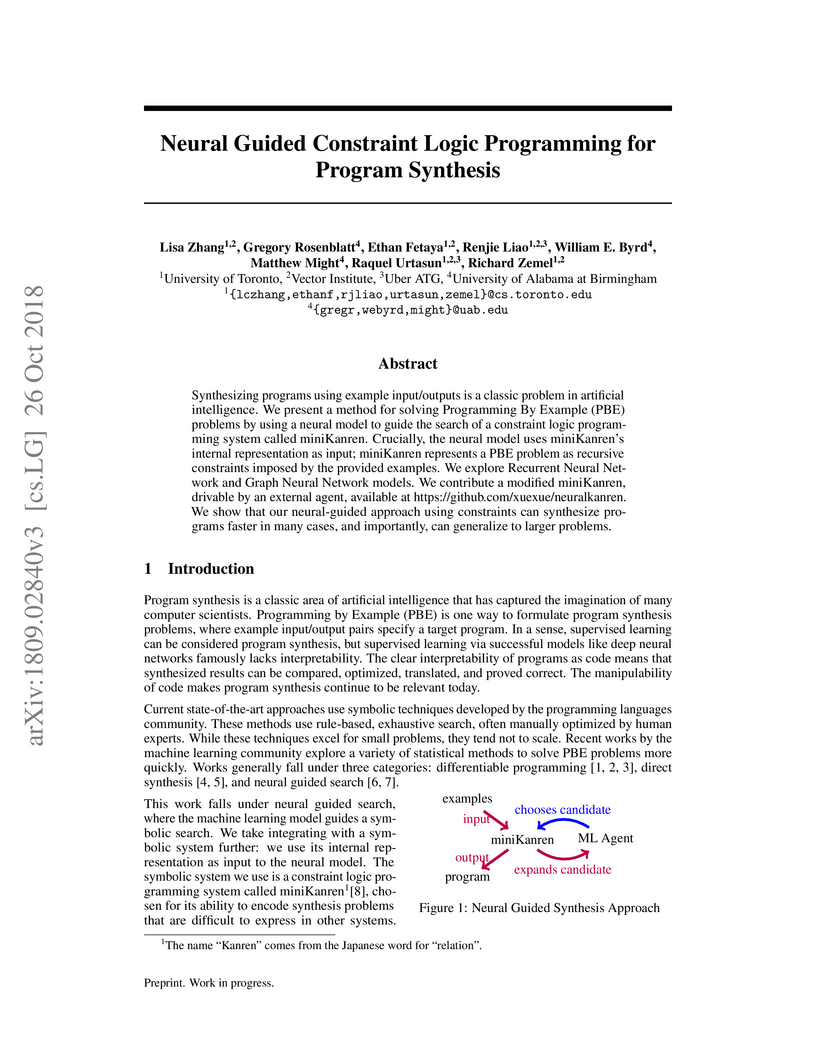
Synthesizing programs using example input/outputs is a classic problem in
artificial intelligence. We present a method for solving Programming By Example
(PBE) problems by using a neural model to guide the search of a constraint
logic programming system called miniKanren. Crucially, the neural model uses
miniKanren's internal representation as input; miniKanren represents a PBE
problem as recursive constraints imposed by the provided examples. We explore
Recurrent Neural Network and Graph Neural Network models. We contribute a
modified miniKanren, drivable by an external agent, available at
this https URL We show that our neural-guided approach
using constraints can synthesize programs faster in many cases, and
importantly, can generalize to larger problems.
09 Aug 2019
In this paper we tackle the problem of stereo image compression, and leverage
the fact that the two images have overlapping fields of view to further
compress the representations. Our approach leverages state-of-the-art
single-image compression autoencoders and enhances the compression with novel
parametric skip functions to feed fully differentiable, disparity-warped
features at all levels to the encoder/decoder of the second image. Moreover, we
model the probabilistic dependence between the image codes using a conditional
entropy model. Our experiments show an impressive 30 - 50% reduction in the
second image bitrate at low bitrates compared to deep single-image compression,
and a 10 - 20% reduction at higher bitrates.
06 Jun 2021
Most modern multiple object tracking (MOT) systems follow the tracking-by-detection paradigm, consisting of a detector followed by a method for associating detections into tracks. There is a long history in tracking of combining motion and appearance features to provide robustness to occlusions and other challenges, but typically this comes with the trade-off of a more complex and slower implementation. Recent successes on popular 2D tracking benchmarks indicate that top-scores can be achieved using a state-of-the-art detector and relatively simple associations relying on single-frame spatial offsets -- notably outperforming contemporary methods that leverage learned appearance features to help re-identify lost tracks. In this paper, we propose an efficient joint detection and tracking model named DEFT, or "Detection Embeddings for Tracking." Our approach relies on an appearance-based object matching network jointly-learned with an underlying object detection network. An LSTM is also added to capture motion constraints. DEFT has comparable accuracy and speed to the top methods on 2D online tracking leaderboards while having significant advantages in robustness when applied to more challenging tracking data. DEFT raises the bar on the nuScenes monocular 3D tracking challenge, more than doubling the performance of the previous top method. Code is publicly available.

13 Aug 2020
In this paper, we propose the Deep Structured self-Driving Network (DSDNet),
which performs object detection, motion prediction, and motion planning with a
single neural network. Towards this goal, we develop a deep structured energy
based model which considers the interactions between actors and produces
socially consistent multimodal future predictions. Furthermore, DSDNet
explicitly exploits the predicted future distributions of actors to plan a safe
maneuver by using a structured planning cost. Our sample-based formulation
allows us to overcome the difficulty in probabilistic inference of continuous
random variables. Experiments on a number of large-scale self driving datasets
demonstrate that our model significantly outperforms the state-of-the-art.

16 Jul 2020

3D generative shape modeling is a fundamental research area in computer
vision and interactive computer graphics, with many real-world applications.
This paper investigates the novel problem of generating 3D shape point cloud
geometry from a symbolic part tree representation. In order to learn such a
conditional shape generation procedure in an end-to-end fashion, we propose a
conditional GAN "part tree"-to-"point cloud" model (PT2PC) that disentangles
the structural and geometric factors. The proposed model incorporates the part
tree condition into the architecture design by passing messages top-down and
bottom-up along the part tree hierarchy. Experimental results and user study
demonstrate the strengths of our method in generating perceptually plausible
and diverse 3D point clouds, given the part tree condition. We also propose a
novel structural measure for evaluating if the generated shape point clouds
satisfy the part tree conditions.

26 Mar 2021
In this paper, we propose an end-to-end self-driving network featuring a sparse attention module that learns to automatically attend to important regions of the input. The attention module specifically targets motion planning, whereas prior literature only applied attention in perception tasks. Learning an attention mask directly targeted for motion planning significantly improves the planner safety by performing more focused computation. Furthermore, visualizing the attention improves interpretability of end-to-end self-driving.

07 Jan 2021
In this paper, we address the important problem in self-driving of
forecasting multi-pedestrian motion and their shared scene occupancy map,
critical for safe navigation. Our contributions are two-fold. First, we
advocate for predicting both the individual motions as well as the scene
occupancy map in order to effectively deal with missing detections caused by
postprocessing, e.g., confidence thresholding and non-maximum suppression.
Second, we propose a Scene-Actor Graph Neural Network (SA-GNN) which preserves
the relative spatial information of pedestrians via 2D convolution, and
captures the interactions among pedestrians within the same scene, including
those that have not been detected, via message passing. On two large-scale
real-world datasets, nuScenes and ATG4D, we showcase that our scene-occupancy
predictions are more accurate and better calibrated than those from
state-of-the-art motion forecasting methods, while also matching their
performance in pedestrian motion forecasting metrics.
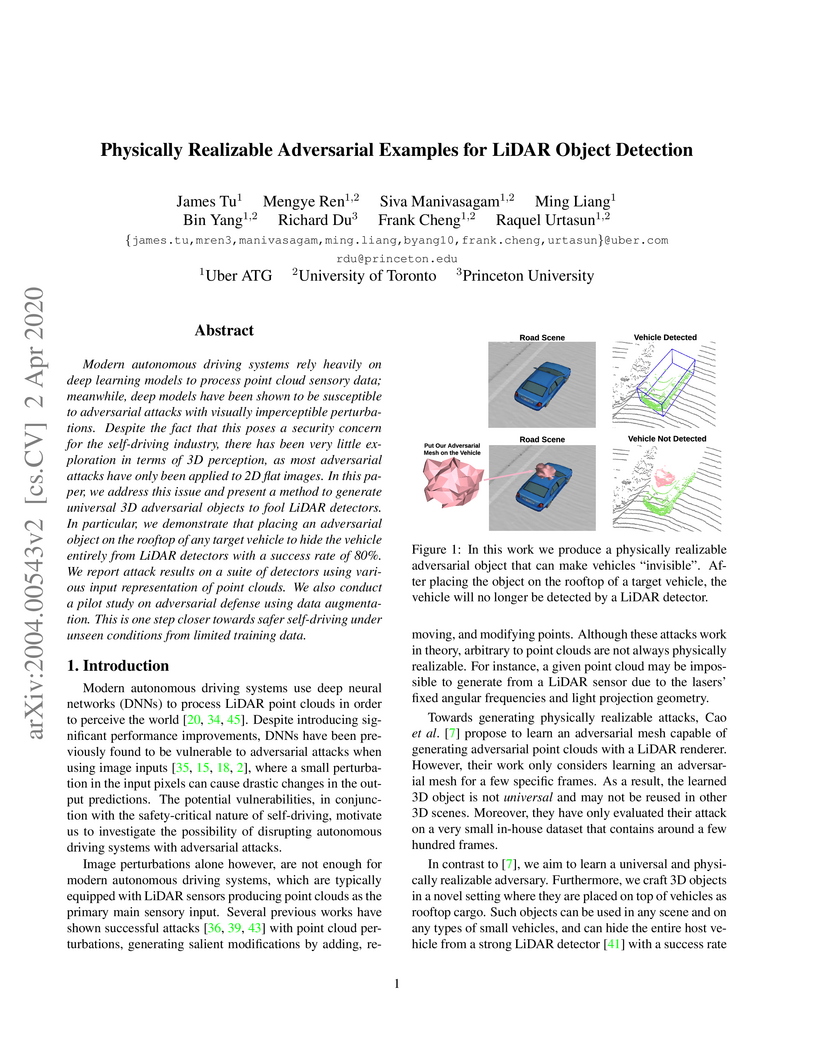
02 Apr 2020

Modern autonomous driving systems rely heavily on deep learning models to process point cloud sensory data; meanwhile, deep models have been shown to be susceptible to adversarial attacks with visually imperceptible perturbations. Despite the fact that this poses a security concern for the self-driving industry, there has been very little exploration in terms of 3D perception, as most adversarial attacks have only been applied to 2D flat images. In this paper, we address this issue and present a method to generate universal 3D adversarial objects to fool LiDAR detectors. In particular, we demonstrate that placing an adversarial object on the rooftop of any target vehicle to hide the vehicle entirely from LiDAR detectors with a success rate of 80%. We report attack results on a suite of detectors using various input representation of point clouds. We also conduct a pilot study on adversarial defense using data augmentation. This is one step closer towards safer self-driving under unseen conditions from limited training data.
17 Dec 2019
In this work, we aim to predict the future motion of vehicles in a traffic
scene by explicitly modeling their pairwise interactions. Specifically, we
propose a graph neural network that jointly predicts the discrete interaction
modes and 5-second future trajectories for all agents in the scene. Our model
infers an interaction graph whose nodes are agents and whose edges capture the
long-term interaction intents among the agents. In order to train the model to
recognize known modes of interaction, we introduce an auto-labeling function to
generate ground truth interaction labels. Using a large-scale real-world
driving dataset, we demonstrate that jointly predicting the trajectories along
with the explicit interaction types leads to significantly lower trajectory
error than baseline methods. Finally, we show through simulation studies that
the learned interaction modes are semantically meaningful.
27 Apr 2020

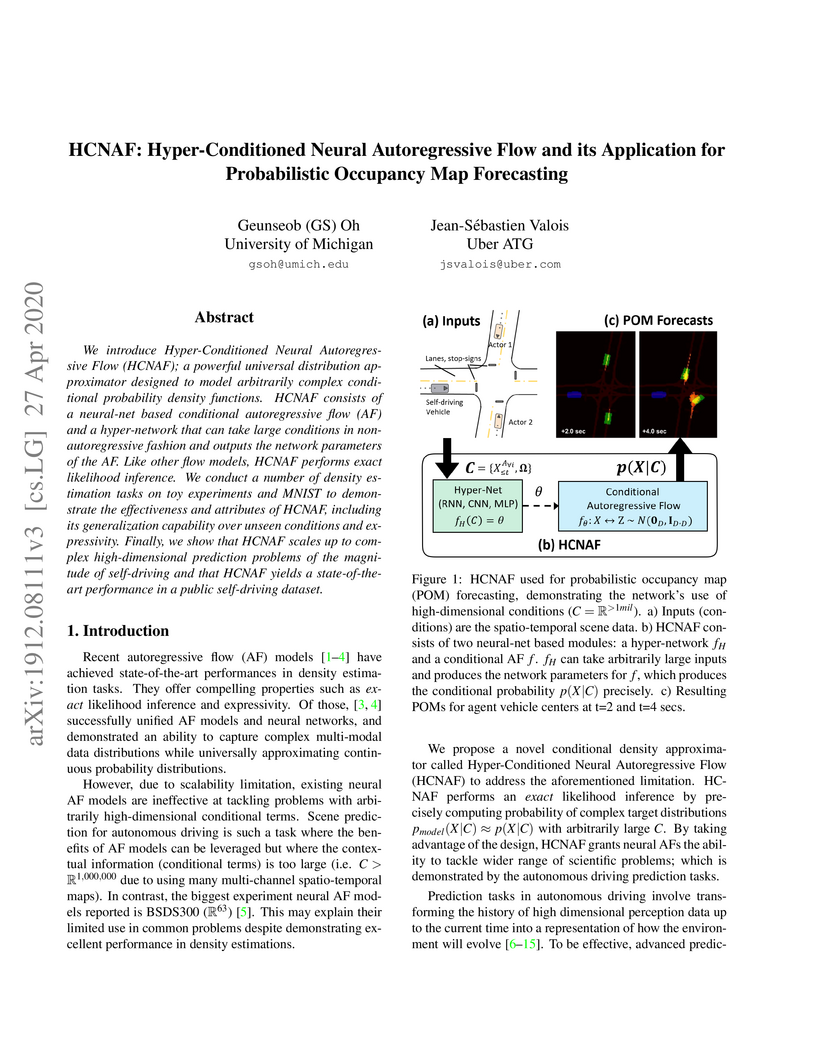
We introduce Hyper-Conditioned Neural Autoregressive Flow (HCNAF); a powerful
universal distribution approximator designed to model arbitrarily complex
conditional probability density functions. HCNAF consists of a neural-net based
conditional autoregressive flow (AF) and a hyper-network that can take large
conditions in non-autoregressive fashion and outputs the network parameters of
the AF. Like other flow models, HCNAF performs exact likelihood inference. We
conduct a number of density estimation tasks on toy experiments and MNIST to
demonstrate the effectiveness and attributes of HCNAF, including its
generalization capability over unseen conditions and expressivity. Finally, we
show that HCNAF scales up to complex high-dimensional prediction problems of
the magnitude of self-driving and that HCNAF yields a state-of-the-art
performance in a public self-driving dataset.
There are no more papers matching your filters at the moment.
