08 Dec 2025
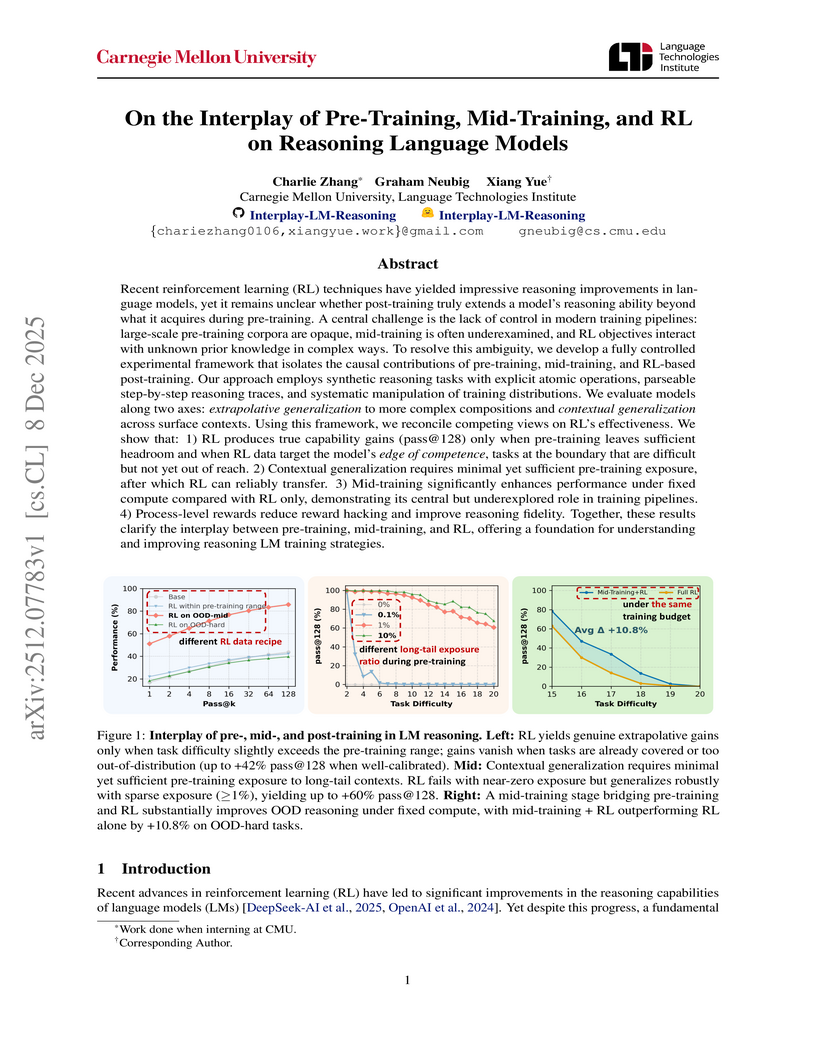
This research disentangles the causal effects of pre-training, mid-training, and reinforcement learning (RL) on language model reasoning using a controlled synthetic task framework. It establishes that RL extends reasoning capabilities only under specific conditions of pre-training exposure and data calibration, with mid-training playing a crucial role in bridging training stages and improving generalization.
09 Dec 2025




Wan-Move presents a framework for motion-controllable video generation that utilizes latent trajectory guidance to directly edit image condition features within a pre-trained image-to-video model. This method yields superior visual quality and precise motion adherence compared to state-of-the-art academic approaches and rivals commercial solutions, while also establishing MoveBench, a new comprehensive evaluation benchmark.
06 Dec 2025
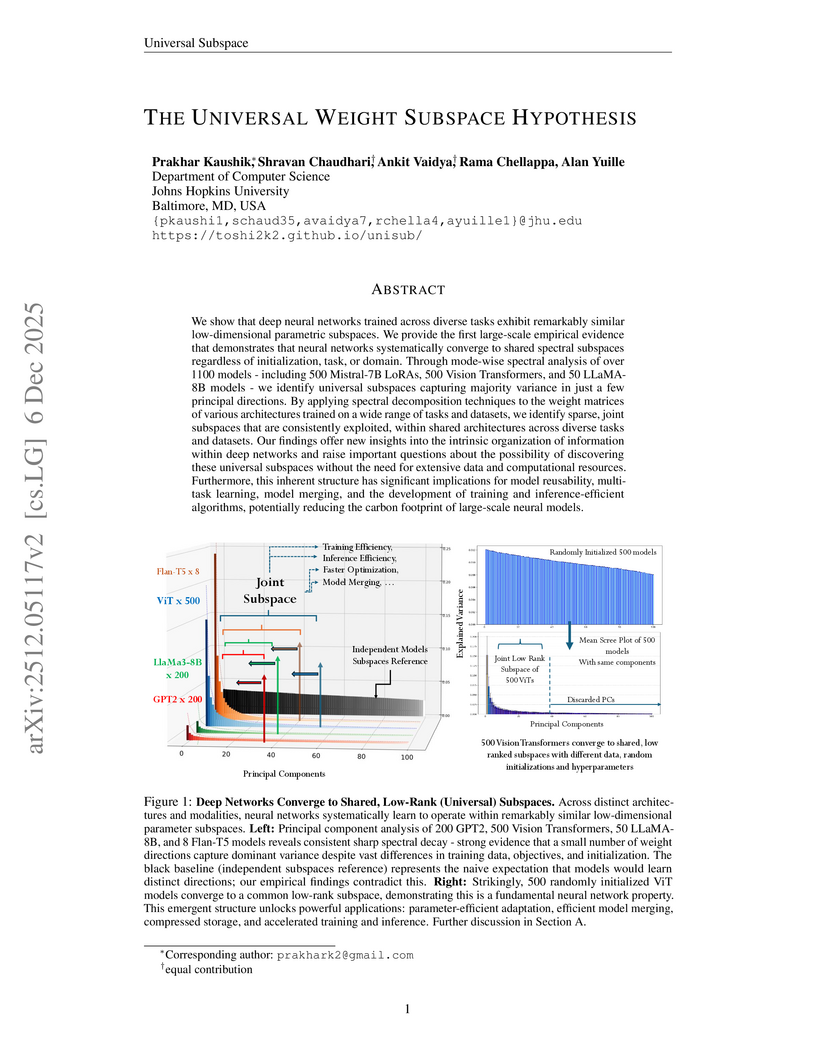
This paper presents the Universal Weight Subspace Hypothesis, demonstrating empirically that deep neural networks trained across diverse tasks and modalities converge to shared low-dimensional parametric subspaces. This convergence enables significant memory savings, such as up to 100x for Vision Transformers and LLaMA models, and 19x for LoRA adapters, while preserving model performance and enhancing efficiency in model merging and adaptation.

08 Dec 2025
The Native Parallel Reasoner (NPR) framework allows Large Language Models to autonomously acquire and deploy genuine parallel reasoning capabilities, without relying on external teacher models. Experiments show NPR improves accuracy by up to 24.5% over baselines and delivers up to 4.6 times faster inference, maintaining 100% parallel execution across various benchmarks.

09 Dec 2025
The paper empirically investigates the performance of multi-agent LLM systems across diverse agentic tasks and architectures, revealing that benefits are highly contingent on task structure rather than universal. It establishes a quantitative scaling principle, achieving 87% accuracy in predicting optimal agent architectures for unseen tasks based on model capability, task properties, and measured coordination dynamics.
08 Dec 2025

Researchers from Fudan University and Shanghai Innovation Institute introduced RoPE++, an extension of Rotary Position Embeddings that re-incorporates the previously discarded imaginary component of attention scores to improve long-context modeling in Large Language Models. This method consistently outperforms standard RoPE on various benchmarks and offers significant KV-cache and parameter efficiency.
09 Dec 2025
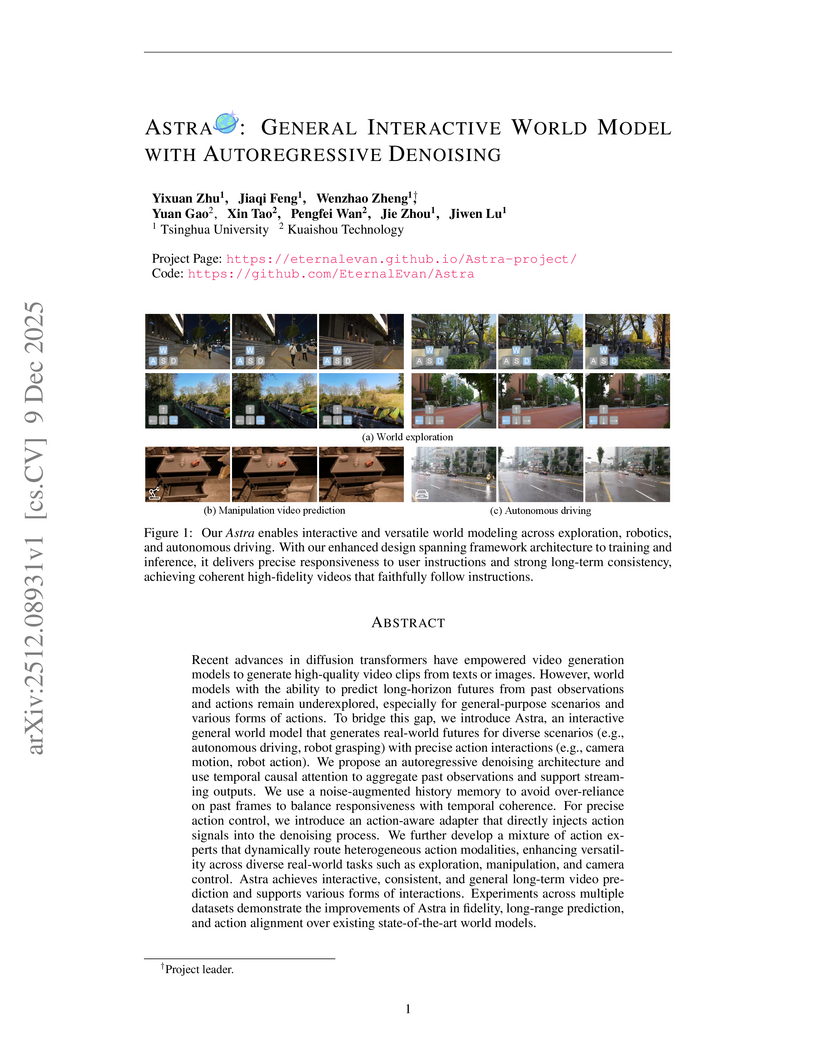
Astra, a collaborative effort from Tsinghua University and Kuaishou Technology, introduces an interactive general world model using an autoregressive denoising framework to generate real-world futures with precise action interactions. The model achieves superior performance in instruction following and visual fidelity across diverse simulation scenarios while efficiently extending a pre-trained video diffusion backbone.
08 Dec 2025

Apple researchers introduced FAE (Feature Auto-Encoder), a minimalist framework using a single attention layer and a double-decoder architecture to adapt high-dimensional self-supervised visual features into compact, generation-friendly latent spaces. FAE achieves competitive FID scores on ImageNet (1.29) and MS-COCO (6.90) for image generation while preserving semantic understanding capabilities of the original pre-trained encoders.

08 Dec 2025

The DEMOCRITUS system establishes a new framework for building large causal models (LCMs) by extracting and structuring textual knowledge from Large Language Models (LLMs) across diverse domains. It leverages a Geometric Transformer to embed and organize vast causal claims into coherent, navigable manifolds, which, unlike raw LLM outputs, exhibit global causal coherence and interpretable local structures.
07 Dec 2025
WisPaper introduces an AI-powered scholar search engine that unifies academic literature discovery, management, and continuous tracking within a single platform. Its core Deep Search component, powered by the WisModel agent, achieved 94.8% semantic similarity in query understanding and 93.70% overall accuracy in paper-criteria matching, demonstrating superior performance over leading commercial LLMs, especially in nuanced judgments.
10 Dec 2025
The Astribot Team developed Lumo-1, a Vision-Language-Action (VLA) model that explicitly integrates structured reasoning with physical actions to achieve purposeful robotic control on their Astribot S1 bimanual mobile manipulator. This system exhibits superior generalization to novel objects and instructions, improves reasoning-action consistency through reinforcement learning, and outperforms state-of-the-art baselines in complex, long-horizon, and dexterous tasks.
09 Dec 2025
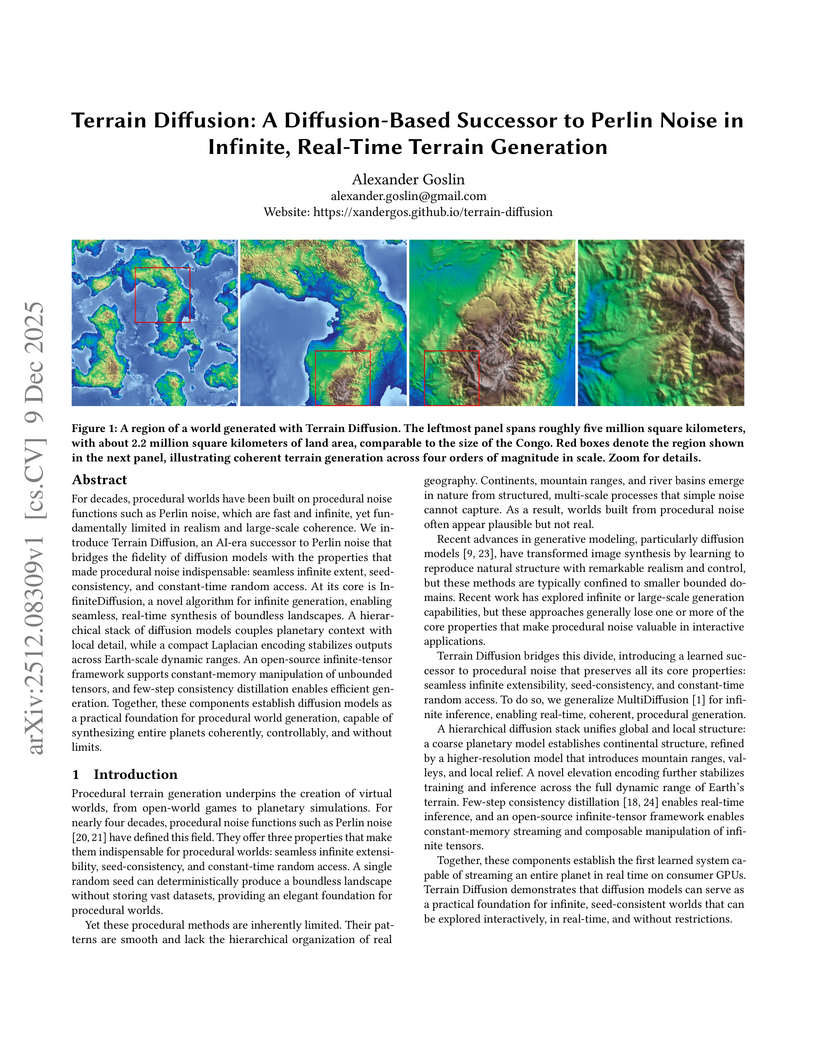
Terrain Diffusion introduces a diffusion-based framework for generating infinite, real-time procedural terrain, delivering highly realistic, boundless virtual worlds with seed-consistency and constant-time random access. The system achieves competitive FID scores and real-time generation latency on consumer hardware, demonstrating its practical applicability.

08 Dec 2025
Meituan's LongCat-Image introduces an open-source, bilingual foundation model for image generation and editing, achieving state-of-the-art performance with a compact 6B parameter architecture. The model establishes new industry standards for Chinese character rendering, reaching 90.7% accuracy on a custom benchmark, and demonstrates robust image editing capabilities, often outperforming larger models.
08 Dec 2025

Researchers from Harvard University and Perplexity conducted a large-scale field study on the real-world adoption and usage of general-purpose AI agents, leveraging hundreds of millions of user interactions with Perplexity's Comet AI-powered browser and its integrated Comet Assistant. The study provides foundational evidence on who uses these agents, their usage intensity, and a detailed breakdown of use cases via a novel hierarchical taxonomy.
09 Dec 2025

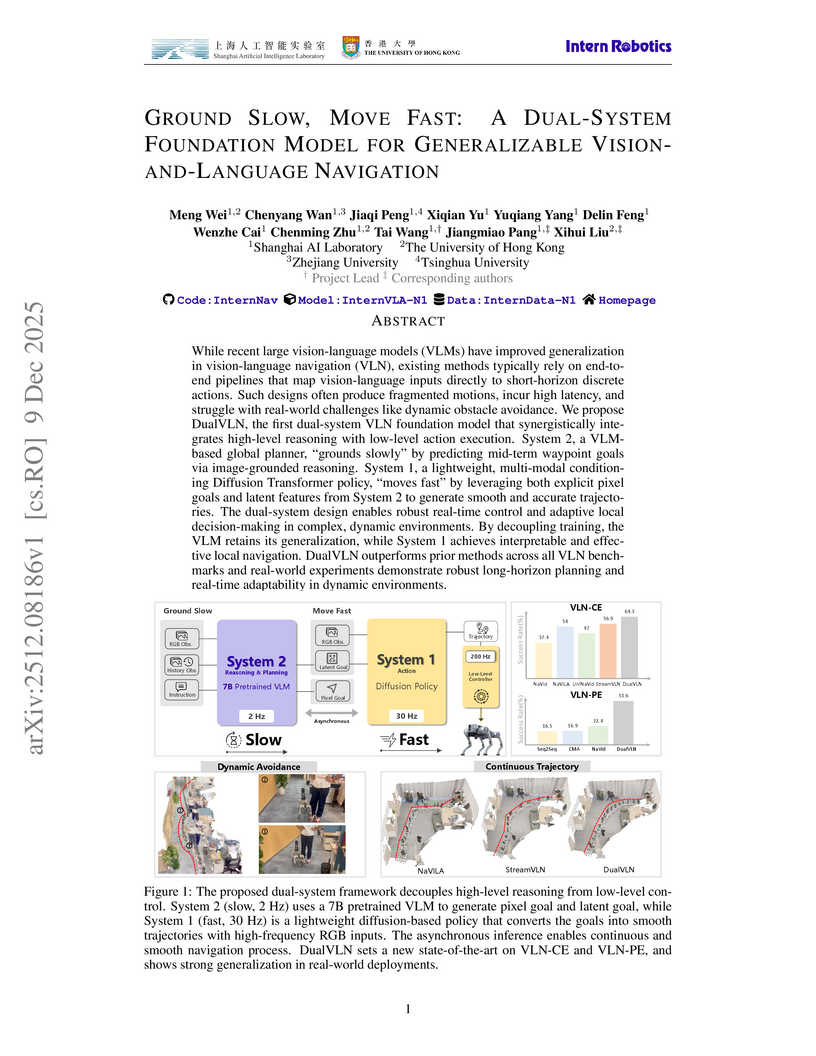
The DualVLN framework addresses Vision-Language Navigation by asynchronously integrating a slow VLM for high-level reasoning and a fast diffusion policy for real-time local control. This "Ground Slow, Move Fast" approach yields enhanced generalization and robust performance, including dynamic obstacle avoidance, across various simulated and real-world robotic platforms.
09 Dec 2025

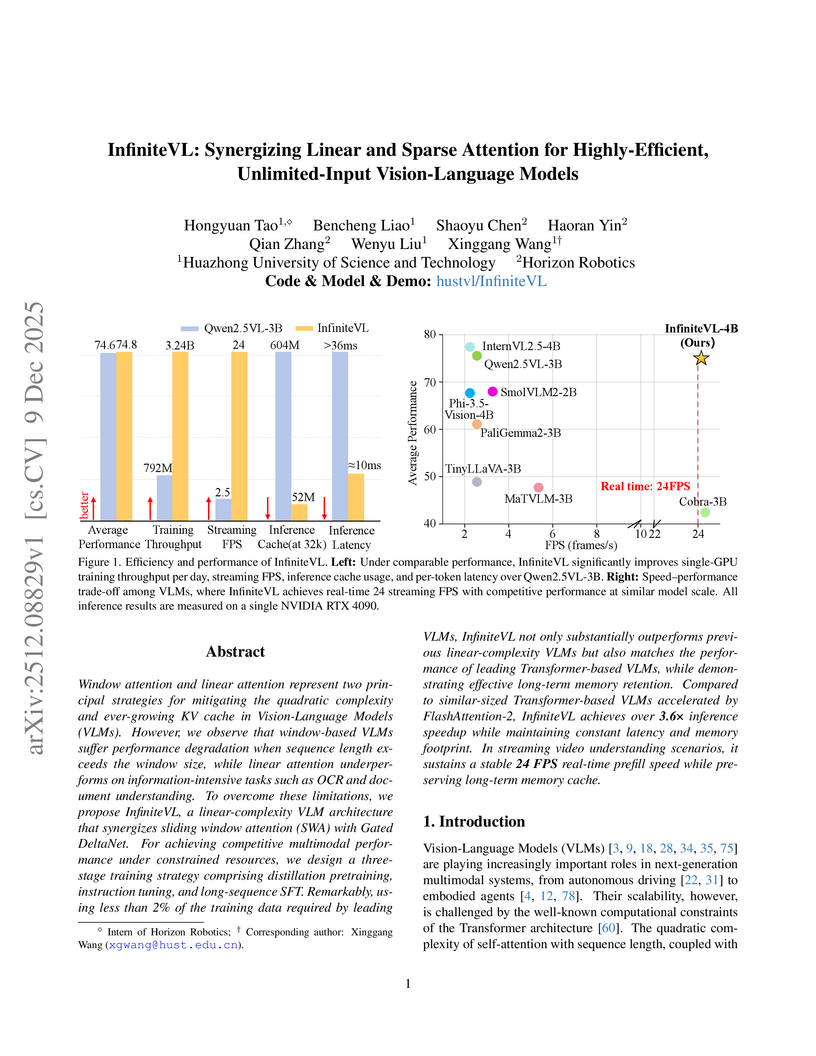
InfiniteVL, a collaboration between Huazhong University of Science and Technology and Horizon Robotics, introduces a hybrid Vision-Language Model that synergizes linear and sparse attention to enable unlimited multimodal input processing with constant latency and memory footprint. The model achieves performance competitive with Transformer-based VLMs on diverse benchmarks, including information-intensive tasks, while demonstrating significant inference speedups and robust real-time streaming capabilities.
07 Dec 2025
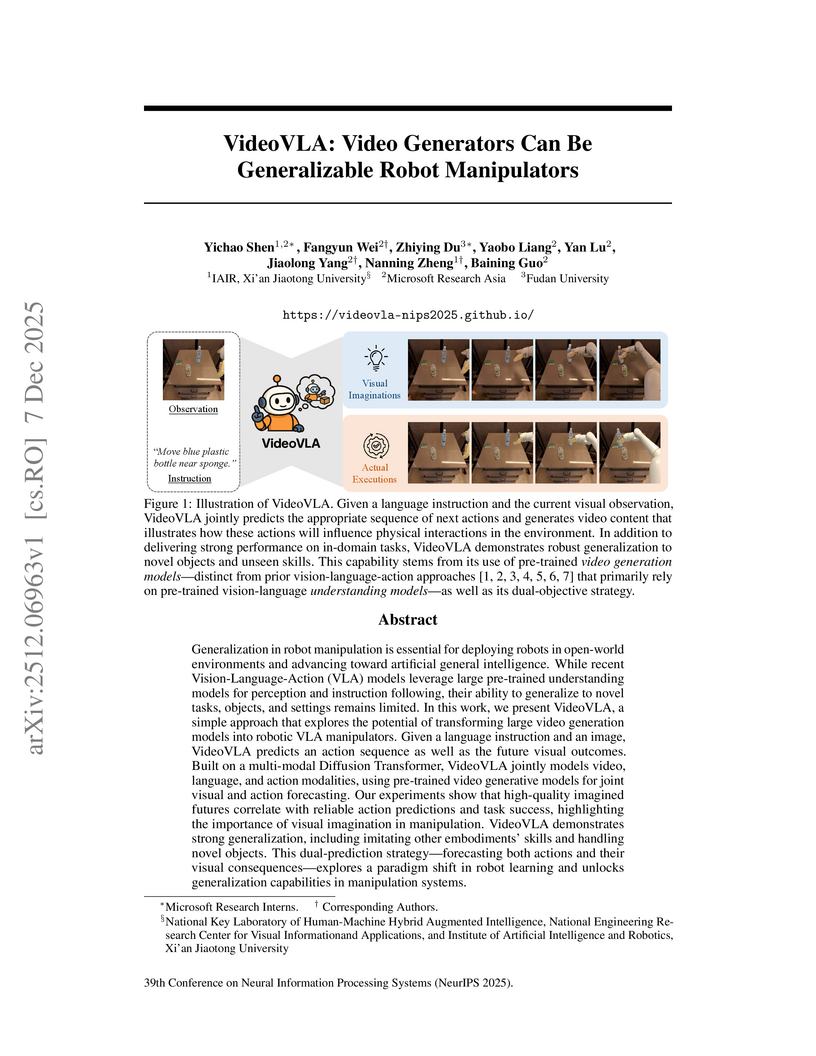
Researchers from Microsoft Research Asia, Xi'an Jiaotong University, and Fudan University developed VideoVLA, a robot manipulator that repurposes large pre-trained video generation models. This system jointly predicts future video states and corresponding actions, achieving enhanced generalization capabilities for novel objects and skills in both simulated and real-world environments.
09 Dec 2025



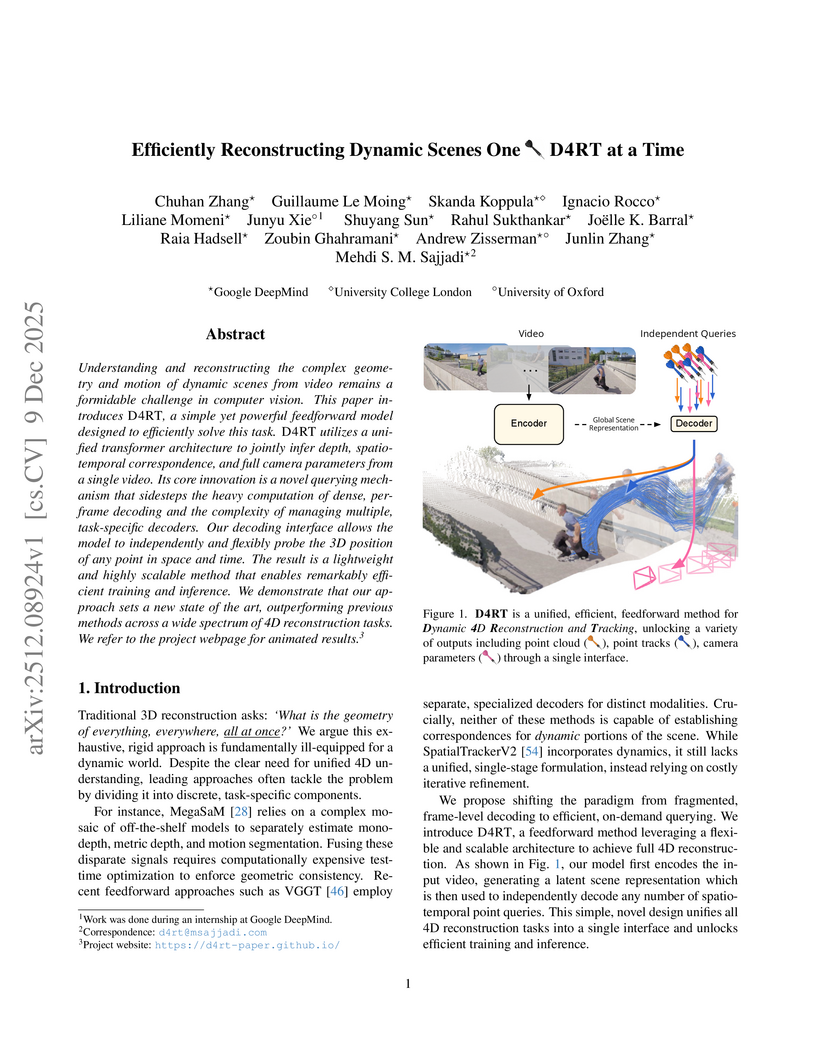
Researchers from Google DeepMind, University College London, and the University of Oxford developed D4RT, a unified feedforward model for reconstructing dynamic 4D scenes, encompassing depth, spatio-temporal correspondence, and camera parameters, from video using a single, flexible querying interface. The model achieved state-of-the-art accuracy across various 4D reconstruction and tracking benchmarks, with 3D tracking throughput 18-300 times faster and pose estimation over 100 times faster than prior methods.
08 Dec 2025
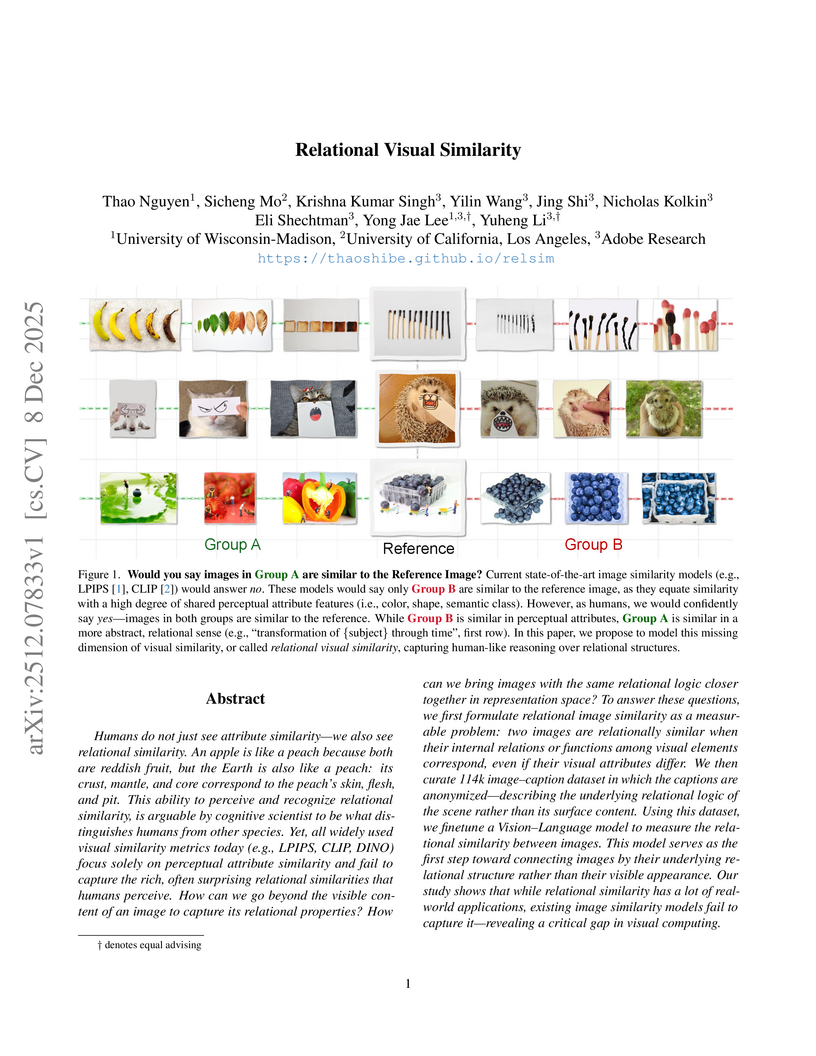
Researchers from University of Wisconsin-Madison, UCLA, and Adobe Research introduce a computational framework for "relational visual similarity," which identifies image commonalities based on abstract logic rather than surface features. Their `relsim` model, trained on a novel dataset of images paired with anonymous group-derived captions, aligns significantly with human perception of relational similarity and outperforms existing attribute-based metrics in retrieval tasks.
10 Dec 2025

UniUGP presents a unified framework for end-to-end autonomous driving, integrating scene understanding, future video generation, and trajectory planning through a hybrid expert architecture. This approach enhances interpretability with Chain-of-Thought reasoning and demonstrates state-of-the-art performance in challenging long-tail scenarios and multimodal capabilities across various benchmarks.
There are no more papers matching your filters at the moment.
