11 Mar 2022
Facebook Carnegie Mellon University
Carnegie Mellon University UC Berkeley
UC Berkeley National University of SingaporeIndiana University
National University of SingaporeIndiana University University of Bristol
University of Bristol University of Texas at Austin
University of Texas at Austin University of Pennsylvania
University of Pennsylvania University of Minnesota
University of Minnesota University of TokyoGeorgia Tech
University of TokyoGeorgia Tech MITKing Abdullah University of Science and TechnologyUniversity of CataniaInternational Institute of Information Technology, HyderabadUniversidad de Los AndesCarnegie Mellon University AfricaDartmouthFacebook AI ResearchFacebook Reality Labs
MITKing Abdullah University of Science and TechnologyUniversity of CataniaInternational Institute of Information Technology, HyderabadUniversidad de Los AndesCarnegie Mellon University AfricaDartmouthFacebook AI ResearchFacebook Reality Labs
Carnegie Mellon UniversityUC BerkeleyNational University of SingaporeIndiana UniversityUniversity of BristolUniversity of Texas at AustinUniversity of PennsylvaniaUniversity of MinnesotaUniversity of TokyoGeorgia TechMITKing Abdullah University of Science and TechnologyUniversity of CataniaInternational Institute of Information Technology, HyderabadUniversidad de Los AndesCarnegie Mellon University AfricaDartmouthFacebook AI ResearchFacebook Reality LabsEgo4D introduces a large-scale collection of 3,670 hours of egocentric video, captured globally from 931 unique wearers, complemented by modalities like audio, 3D environment meshes, and eye gaze. This dataset and its five associated benchmarks aim to advance research in first-person visual perception for embodied AI, enabling tasks such as episodic memory, hand-object manipulation, and activity forecasting.
30 May 2019
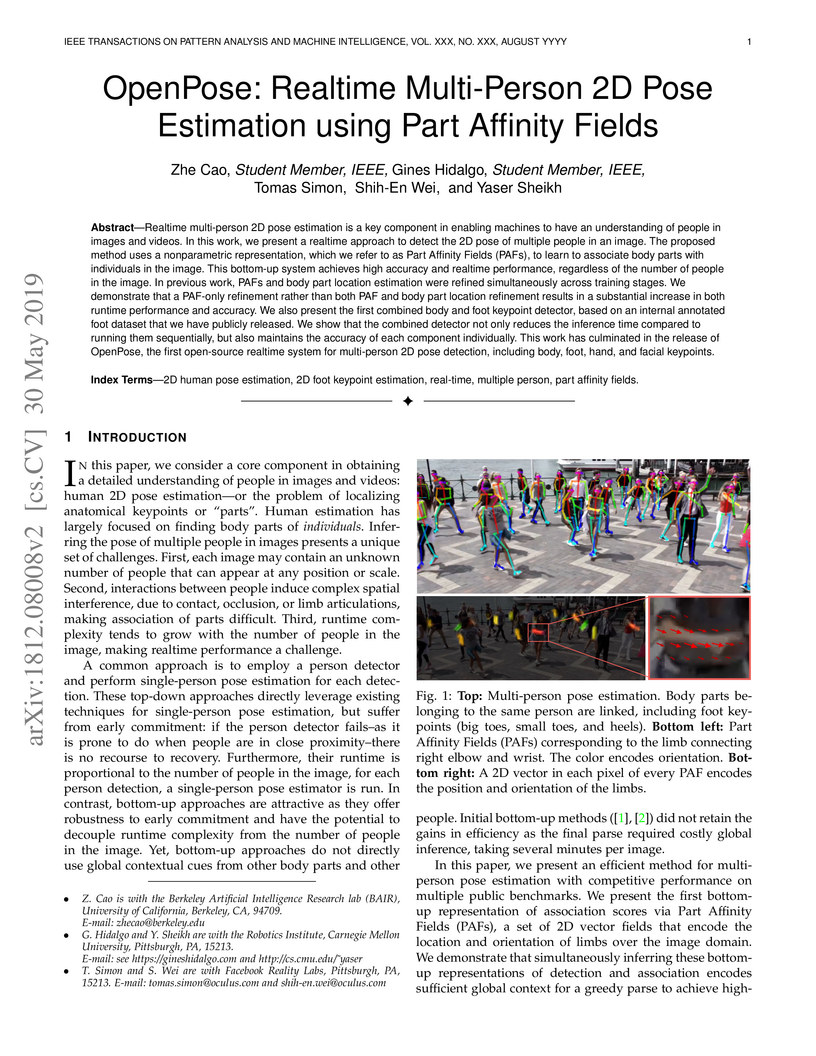
OpenPose introduces Part Affinity Fields (PAFs) for robustly associating body parts, enabling a real-time, bottom-up approach to multi-person 2D pose estimation. The method achieves high accuracy and a runtime invariant to the number of people, extending detection to include detailed foot keypoints.
25 Nov 2019

Facebook AI Research and collaborators developed Habitat, a highly efficient, open-source platform for embodied AI research enabling large-scale photorealistic simulation. Its high performance allowed training learning-based agents with 75 million steps, revealing they can outperform classical SLAM methods for navigation, especially when leveraging depth sensors.
10 Sep 2021


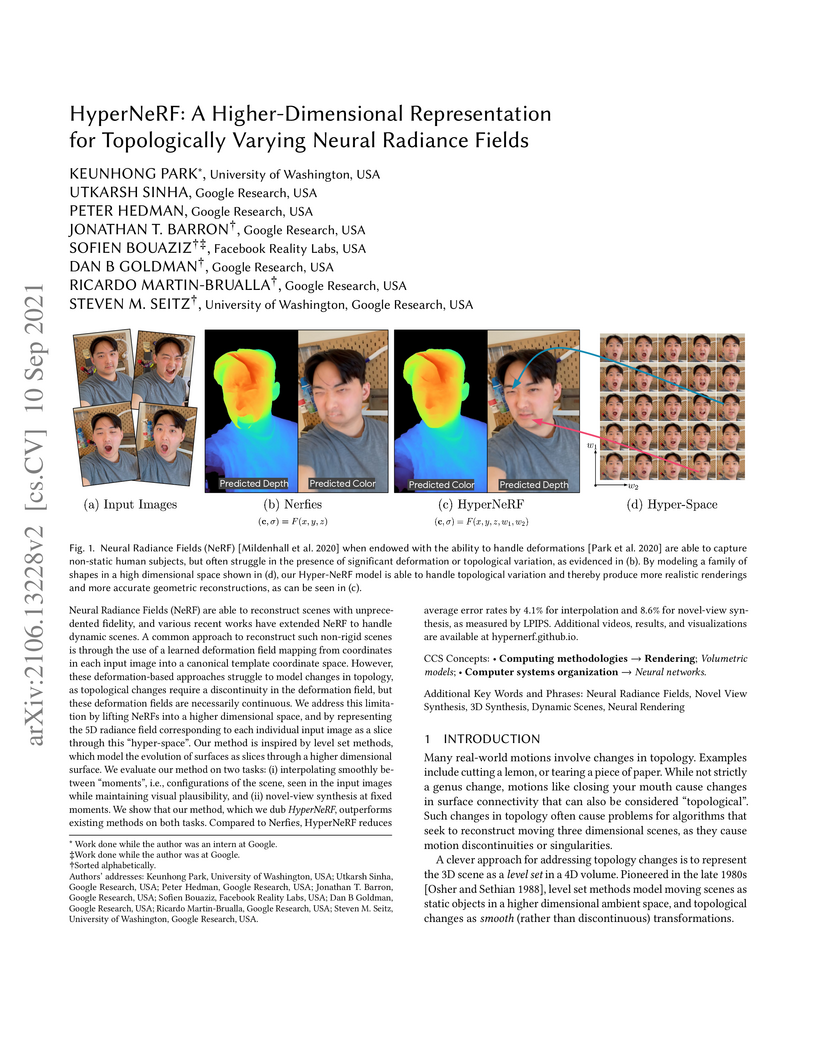
Neural Radiance Fields (NeRF) are able to reconstruct scenes with unprecedented fidelity, and various recent works have extended NeRF to handle dynamic scenes. A common approach to reconstruct such non-rigid scenes is through the use of a learned deformation field mapping from coordinates in each input image into a canonical template coordinate space. However, these deformation-based approaches struggle to model changes in topology, as topological changes require a discontinuity in the deformation field, but these deformation fields are necessarily continuous. We address this limitation by lifting NeRFs into a higher dimensional space, and by representing the 5D radiance field corresponding to each individual input image as a slice through this "hyper-space". Our method is inspired by level set methods, which model the evolution of surfaces as slices through a higher dimensional surface. We evaluate our method on two tasks: (i) interpolating smoothly between "moments", i.e., configurations of the scene, seen in the input images while maintaining visual plausibility, and (ii) novel-view synthesis at fixed moments. We show that our method, which we dub HyperNeRF, outperforms existing methods on both tasks. Compared to Nerfies, HyperNeRF reduces average error rates by 4.1% for interpolation and 8.6% for novel-view synthesis, as measured by LPIPS. Additional videos, results, and visualizations are available at this https URL.

19 Jul 2020
Grasping is natural for humans. However, it involves complex hand
configurations and soft tissue deformation that can result in complicated
regions of contact between the hand and the object. Understanding and modeling
this contact can potentially improve hand models, AR/VR experiences, and
robotic grasping. Yet, we currently lack datasets of hand-object contact paired
with other data modalities, which is crucial for developing and evaluating
contact modeling techniques. We introduce ContactPose, the first dataset of
hand-object contact paired with hand pose, object pose, and RGB-D images.
ContactPose has 2306 unique grasps of 25 household objects grasped with 2
functional intents by 50 participants, and more than 2.9 M RGB-D grasp images.
Analysis of ContactPose data reveals interesting relationships between hand
pose and contact. We use this data to rigorously evaluate various data
representations, heuristics from the literature, and learning methods for
contact modeling. Data, code, and trained models are available at
this https URL

21 Aug 2020

Moving around in the world is naturally a multisensory experience, but today's embodied agents are deaf---restricted to solely their visual perception of the environment. We introduce audio-visual navigation for complex, acoustically and visually realistic 3D environments. By both seeing and hearing, the agent must learn to navigate to a sounding object. We propose a multi-modal deep reinforcement learning approach to train navigation policies end-to-end from a stream of egocentric audio-visual observations, allowing the agent to (1) discover elements of the geometry of the physical space indicated by the reverberating audio and (2) detect and follow sound-emitting targets. We further introduce SoundSpaces: a first-of-its-kind dataset of audio renderings based on geometrical acoustic simulations for two sets of publicly available 3D environments (Matterport3D and Replica), and we instrument Habitat to support the new sensor, making it possible to insert arbitrary sound sources in an array of real-world scanned environments. Our results show that audio greatly benefits embodied visual navigation in 3D spaces, and our work lays groundwork for new research in embodied AI with audio-visual perception.

10 Jul 2020
Researchers developed TLIO, a tightly-coupled Extended Kalman Filter that integrates a neural network to estimate 3D displacement and its uncertainty solely from IMU data for pedestrian state estimation. This system achieved an average position drift reduction of 33% and yaw drift reduction of 27% compared to a decoupled learning-based baseline.

20 May 2022
MeshTalk presents a generic method for high-fidelity 3D full-face animation from speech by learning a categorical latent space that disentangles audio-correlated and audio-uncorrelated facial movements. This approach enables the synthesis of highly realistic lip synchronization alongside plausible and diverse upper-face animations, such as eye blinks and eyebrow raises, outperforming prior generic models.

25 Jun 2021
We present a learning-based method for building driving-signal aware full-body avatars. Our model is a conditional variational autoencoder that can be animated with incomplete driving signals, such as human pose and facial keypoints, and produces a high-quality representation of human geometry and view-dependent appearance. The core intuition behind our method is that better drivability and generalization can be achieved by disentangling the driving signals and remaining generative factors, which are not available during animation. To this end, we explicitly account for information deficiency in the driving signal by introducing a latent space that exclusively captures the remaining information, thus enabling the imputation of the missing factors required during full-body animation, while remaining faithful to the driving signal. We also propose a learnable localized compression for the driving signal which promotes better generalization, and helps minimize the influence of global chance-correlations often found in real datasets. For a given driving signal, the resulting variational model produces a compact space of uncertainty for missing factors that allows for an imputation strategy best suited to a particular application. We demonstrate the efficacy of our approach on the challenging problem of full-body animation for virtual telepresence with driving signals acquired from minimal sensors placed in the environment and mounted on a VR-headset.

13 Jun 2022

This research introduces and solves the visual acoustic matching task, where a source audio's acoustics are transformed to match a target environment's visual properties. The proposed AViTAR model, trained with a novel self-supervised acoustics alteration strategy, synthesizes high-fidelity audio that accurately reflects the visual scene and is preferred by human evaluators over baselines.

13 Aug 2021

Most existing monocular 3D pose estimation approaches only focus on a single body part, neglecting the fact that the essential nuance of human motion is conveyed through a concert of subtle movements of face, hands, and body. In this paper, we present FrankMocap, a fast and accurate whole-body 3D pose estimation system that can produce 3D face, hands, and body simultaneously from in-the-wild monocular images. The core idea of FrankMocap is its modular design: We first run 3D pose regression methods for face, hands, and body independently, followed by composing the regression outputs via an integration module. The separate regression modules allow us to take full advantage of their state-of-the-art performances without compromising the original accuracy and reliability in practice. We develop three different integration modules that trade off between latency and accuracy. All of them are capable of providing simple yet effective solutions to unify the separate outputs into seamless whole-body pose estimation results. We quantitatively and qualitatively demonstrate that our modularized system outperforms both the optimization-based and end-to-end methods of estimating whole-body pose.
25 Jan 2021
Collision avoidance algorithms are essential for safe and efficient robot operation among pedestrians. This work proposes using deep reinforcement (RL) learning as a framework to model the complex interactions and cooperation with nearby, decision-making agents, such as pedestrians and other robots. Existing RL-based works assume homogeneity of agent properties, use specific motion models over short timescales, or lack a principled method to handle a large, possibly varying number of agents. Therefore, this work develops an algorithm that learns collision avoidance among a variety of heterogeneous, non-communicating, dynamic agents without assuming they follow any particular behavior rules. It extends our previous work by introducing a strategy using Long Short-Term Memory (LSTM) that enables the algorithm to use observations of an arbitrary number of other agents, instead of a small, fixed number of neighbors. The proposed algorithm is shown to outperform a classical collision avoidance algorithm, another deep RL-based algorithm, and scales with the number of agents better (fewer collisions, shorter time to goal) than our previously published learning-based approach. Analysis of the LSTM provides insights into how observations of nearby agents affect the hidden state and quantifies the performance impact of various agent ordering heuristics. The learned policy generalizes to several applications beyond the training scenarios: formation control (arrangement into letters), demonstrations on a fleet of four multirotors and on a fully autonomous robotic vehicle capable of traveling at human walking speed among pedestrians.

09 Dec 2020
Marker-less 3D human motion capture from a single colour camera has seen significant progress. However, it is a very challenging and severely ill-posed problem. In consequence, even the most accurate state-of-the-art approaches have significant limitations. Purely kinematic formulations on the basis of individual joints or skeletons, and the frequent frame-wise reconstruction in state-of-the-art methods greatly limit 3D accuracy and temporal stability compared to multi-view or marker-based motion capture. Further, captured 3D poses are often physically incorrect and biomechanically implausible, or exhibit implausible environment interactions (floor penetration, foot skating, unnatural body leaning and strong shifting in depth), which is problematic for any use case in computer graphics. We, therefore, present PhysCap, the first algorithm for physically plausible, real-time and marker-less human 3D motion capture with a single colour camera at 25 fps. Our algorithm first captures 3D human poses purely kinematically. To this end, a CNN infers 2D and 3D joint positions, and subsequently, an inverse kinematics step finds space-time coherent joint angles and global 3D pose. Next, these kinematic reconstructions are used as constraints in a real-time physics-based pose optimiser that accounts for environment constraints (e.g., collision handling and floor placement), gravity, and biophysical plausibility of human postures. Our approach employs a combination of ground reaction force and residual force for plausible root control, and uses a trained neural network to detect foot contact events in images. Our method captures physically plausible and temporally stable global 3D human motion, without physically implausible postures, floor penetrations or foot skating, from video in real time and in general scenes. The video is available at this http URL

24 Mar 2022
Geometric Deep Learning has recently made striking progress with the advent
of continuous deep implicit fields. They allow for detailed modeling of
watertight surfaces of arbitrary topology while not relying on a 3D Euclidean
grid, resulting in a learnable parameterization that is unlimited in
resolution.
Unfortunately, these methods are often unsuitable for applications that
require an explicit mesh-based surface representation because converting an
implicit field to such a representation relies on the Marching Cubes algorithm,
which cannot be differentiated with respect to the underlying implicit field.
In this work, we remove this limitation and introduce a differentiable way to
produce explicit surface mesh representations from Deep Implicit Fields. Our
key insight is that by reasoning on how implicit field perturbations impact
local surface geometry, one can ultimately differentiate the 3D location of
surface samples with respect to the underlying deep implicit field. We exploit
this to define DeepMesh - an end-to-end differentiable mesh representation that
can vary its topology.
We validate our theoretical insight through several applications: Single view
3D Reconstruction via Differentiable Rendering, Physically-Driven Shape
Optimization, Full Scene 3D Reconstruction from Scans and End-to-End Training.
In all cases our end-to-end differentiable parameterization gives us an edge
over state-of-the-art algorithms.
25 Jun 2021
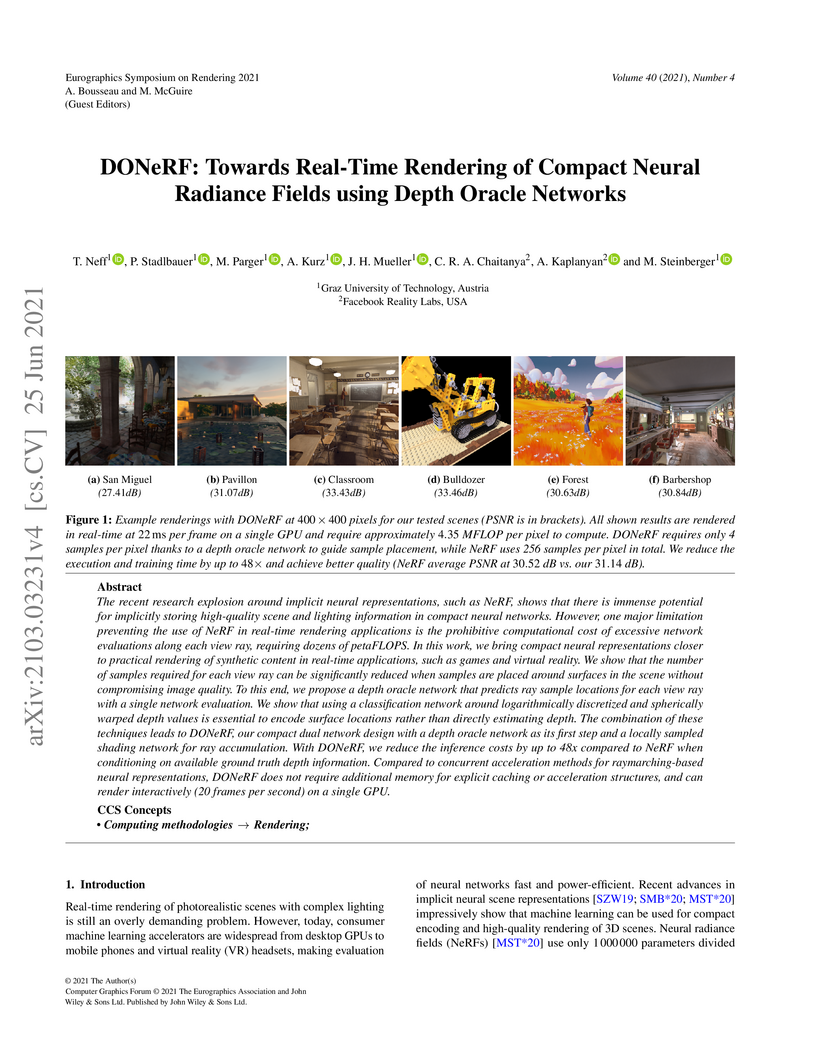
The recent research explosion around implicit neural representations, such as
NeRF, shows that there is immense potential for implicitly storing high-quality
scene and lighting information in compact neural networks. However, one major
limitation preventing the use of NeRF in real-time rendering applications is
the prohibitive computational cost of excessive network evaluations along each
view ray, requiring dozens of petaFLOPS. In this work, we bring compact neural
representations closer to practical rendering of synthetic content in real-time
applications, such as games and virtual reality. We show that the number of
samples required for each view ray can be significantly reduced when samples
are placed around surfaces in the scene without compromising image quality. To
this end, we propose a depth oracle network that predicts ray sample locations
for each view ray with a single network evaluation. We show that using a
classification network around logarithmically discretized and spherically
warped depth values is essential to encode surface locations rather than
directly estimating depth. The combination of these techniques leads to DONeRF,
our compact dual network design with a depth oracle network as its first step
and a locally sampled shading network for ray accumulation. With DONeRF, we
reduce the inference costs by up to 48x compared to NeRF when conditioning on
available ground truth depth information. Compared to concurrent acceleration
methods for raymarching-based neural representations, DONeRF does not require
additional memory for explicit caching or acceleration structures, and can
render interactively (20 frames per second) on a single GPU.
11 Jul 2021

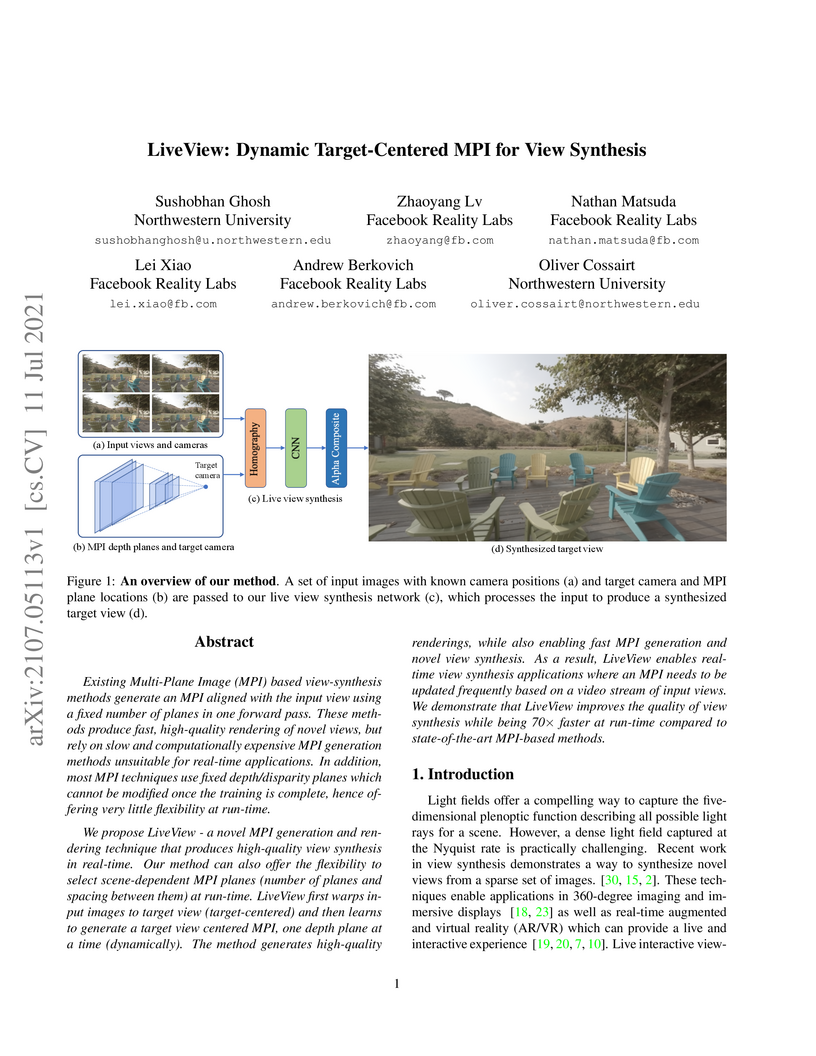
Existing Multi-Plane Image (MPI) based view-synthesis methods generate an MPI aligned with the input view using a fixed number of planes in one forward pass. These methods produce fast, high-quality rendering of novel views, but rely on slow and computationally expensive MPI generation methods unsuitable for real-time applications. In addition, most MPI techniques use fixed depth/disparity planes which cannot be modified once the training is complete, hence offering very little flexibility at run-time.
We propose LiveView - a novel MPI generation and rendering technique that produces high-quality view synthesis in real-time. Our method can also offer the flexibility to select scene-dependent MPI planes (number of planes and spacing between them) at run-time. LiveView first warps input images to target view (target-centered) and then learns to generate a target view centered MPI, one depth plane at a time (dynamically). The method generates high-quality renderings, while also enabling fast MPI generation and novel view synthesis. As a result, LiveView enables real-time view synthesis applications where an MPI needs to be updated frequently based on a video stream of input views. We demonstrate that LiveView improves the quality of view synthesis while being 70 times faster at run-time compared to state-of-the-art MPI-based methods.

21 Nov 2019
Multimodal question answering tasks can be used as proxy tasks to study
systems that can perceive and reason about the world. Answering questions about
different types of input modalities stresses different aspects of reasoning
such as visual reasoning, reading comprehension, story understanding, or
navigation. In this paper, we use the task of Audio Question Answering (AQA) to
study the temporal reasoning abilities of machine learning models. To this end,
we introduce the Diagnostic Audio Question Answering (DAQA) dataset comprising
audio sequences of natural sound events and programmatically generated
questions and answers that probe various aspects of temporal reasoning. We
adapt several recent state-of-the-art methods for visual question answering to
the AQA task, and use DAQA to demonstrate that they perform poorly on questions
that require in-depth temporal reasoning. Finally, we propose a new model,
Multiple Auxiliary Controllers for Linear Modulation (MALiMo) that extends the
recent Feature-wise Linear Modulation (FiLM) model and significantly improves
its temporal reasoning capabilities. We envisage DAQA to foster research on AQA
and temporal reasoning and MALiMo a step towards models for AQA.

19 Jan 2023

Aggregating information from features across different layers is an essential operation for dense prediction models. Despite its limited expressiveness, feature concatenation dominates the choice of aggregation operations. In this paper, we introduce Attentive Feature Aggregation (AFA) to fuse different network layers with more expressive non-linear operations. AFA exploits both spatial and channel attention to compute weighted average of the layer activations. Inspired by neural volume rendering, we extend AFA with Scale-Space Rendering (SSR) to perform late fusion of multi-scale predictions. AFA is applicable to a wide range of existing network designs. Our experiments show consistent and significant improvements on challenging semantic segmentation benchmarks, including Cityscapes, BDD100K, and Mapillary Vistas, at negligible computational and parameter overhead. In particular, AFA improves the performance of the Deep Layer Aggregation (DLA) model by nearly 6% mIoU on Cityscapes. Our experimental analyses show that AFA learns to progressively refine segmentation maps and to improve boundary details, leading to new state-of-the-art results on boundary detection benchmarks on BSDS500 and NYUDv2. Code and video resources are available at this http URL.
13 Feb 2021
We propose the first approach to automatically and jointly synthesize both
the synchronous 3D conversational body and hand gestures, as well as 3D face
and head animations, of a virtual character from speech input. Our algorithm
uses a CNN architecture that leverages the inherent correlation between facial
expression and hand gestures. Synthesis of conversational body gestures is a
multi-modal problem since many similar gestures can plausibly accompany the
same input speech. To synthesize plausible body gestures in this setting, we
train a Generative Adversarial Network (GAN) based model that measures the
plausibility of the generated sequences of 3D body motion when paired with the
input audio features. We also contribute a new way to create a large corpus of
more than 33 hours of annotated body, hand, and face data from in-the-wild
videos of talking people. To this end, we apply state-of-the-art monocular
approaches for 3D body and hand pose estimation as well as dense 3D face
performance capture to the video corpus. In this way, we can train on orders of
magnitude more data than previous algorithms that resort to complex in-studio
motion capture solutions, and thereby train more expressive synthesis
algorithms. Our experiments and user study show the state-of-the-art quality of
our speech-synthesized full 3D character animations.
09 Nov 2020

Recent works show that local descriptor learning benefits from the use of L2
normalisation, however, an in-depth analysis of this effect lacks in the
literature. In this paper, we investigate how L2 normalisation affects the
back-propagated descriptor gradients during training. Based on our
observations, we propose HyNet, a new local descriptor that leads to
state-of-the-art results in matching. HyNet introduces a hybrid similarity
measure for triplet margin loss, a regularisation term constraining the
descriptor norm, and a new network architecture that performs L2 normalisation
of all intermediate feature maps and the output descriptors. HyNet surpasses
previous methods by a significant margin on standard benchmarks that include
patch matching, verification, and retrieval, as well as outperforming full
end-to-end methods on 3D reconstruction tasks.
There are no more papers matching your filters at the moment.
