
11 Jun 2024

Accurate models of robot dynamics are critical for safe and stable control and generalization to novel operational conditions. Hand-designed models, however, may be insufficiently accurate, even after careful parameter tuning. This motivates the use of machine learning techniques to approximate the robot dynamics over a training set of state-control trajectories. The dynamics of many robots are described in terms of their generalized coordinates on a matrix Lie group, e.g. on for ground, aerial, and underwater vehicles, and generalized velocity, and satisfy conservation of energy principles. This paper proposes a port-Hamiltonian formulation over a Lie group of the structure of a neural ordinary differential equation (ODE) network to approximate the robot dynamics. In contrast to a black-box ODE network, our formulation embeds energy conservation principle and Lie group's constraints in the dynamics model and explicitly accounts for energy-dissipation effect such as friction and drag forces in the dynamics model. We develop energy shaping and damping injection control for the learned, potentially under-actuated Hamiltonian dynamics to enable a unified approach for stabilization and trajectory tracking with various robot platforms.
07 Jun 2025

This systematic review of 60 studies published between 2020 and 2025 provides the first comprehensive taxonomy of Large Language Model applications in credit risk estimation. The work categorizes LLM architectures, data modalities, interpretability mechanisms, and application domains, identifying prevailing trends and research gaps in the field.

28 Sep 2025
In this note we propose a basic -based approach for studying the global and local energy equalities of the incompressible 3D Navier-Stokes equations in the standard energy class on . Motivated by L. Onsager's principle of least dissipation of energy (1931), we give a new sufficient condition for the energy equalities in terms of the limit of a sequence of minimizers. In particular, we show that the equalities are attained if this limit is non-vanishing. We observe that the indeterminacy in the vanishing case is reminiscent of turbulence-driven energy transfer dominating other transport processes.

03 Oct 2025

Autonomous mobile robots operating in novel environments depend critically on accurate state estimation, often utilizing visual and inertial measurements. Recent work has shown that an invariant formulation of the extended Kalman filter improves the convergence and robustness of visual-inertial odometry by utilizing the Lie group structure of a robot's position, velocity, and orientation states. However, inertial sensors also require measurement bias estimation, yet introducing the bias in the filter state breaks the Lie group symmetry. In this paper, we design a neural network to predict the bias of an inertial measurement unit (IMU) from a sequence of previous IMU measurements. This allows us to use an invariant filter for visual inertial odometry, relying on the learned bias prediction rather than introducing the bias in the filter state. We demonstrate that an invariant multi-state constraint Kalman filter (MSCKF) with learned bias predictions achieves robust visual-inertial odometry in real experiments, even when visual information is unavailable for extended periods and the system needs to rely solely on IMU measurements.

11 Mar 2025

Outdoor thermal comfort is a critical determinant of urban livability,
particularly in hot desert climates where extreme heat poses challenges to
public health, energy consumption, and urban planning. Mean Radiant Temperature
() is a key parameter for evaluating outdoor thermal comfort,
especially in urban environments where radiation dynamics significantly impact
human thermal exposure. Traditional methods of estimating rely on
field measurements and computational simulations, both of which are resource
intensive. This study introduces a Physics-Informed Neural Network (PINN)
approach that integrates shortwave and longwave radiation modeling with deep
learning techniques. By leveraging a multimodal dataset that includes
meteorological data, built environment characteristics, and fisheye
image-derived shading information, our model enhances predictive accuracy while
maintaining physical consistency. Our experimental results demonstrate that the
proposed PINN framework outperforms conventional deep learning models, with the
best-performing configurations achieving an RMSE of 3.50 and an of 0.88.
This approach highlights the potential of physics-informed machine learning in
bridging the gap between computational modeling and real-world applications,
offering a scalable and interpretable solution for urban thermal comfort
assessments.

11 May 2015
An industrial grade Quicksort function along with its new algorithm is
presented. Compared to 4 other well known implementations of Quicksort, the new
algorithm reduces both the number of comparisons and swaps in most cases while
staying close to the best of the 4 in worst cases. We trade space for
performance, at the price of n/2 temporary extra spaces in the worst case. Run
time tests reveal an overall improvement of at least 15.8% compared to the
overall best of the other 4 functions. Furthermore, our function scores a 32.7%
run time improvement against Yaroslavskiy's new Dual Pivot Quicksort. Our
function is pointer based, which is meant as a replacement for the C/C++
library qsort(). But we also provide an array based function of the same
algorithm for easy porting to different programming languages.
05 Jun 2025

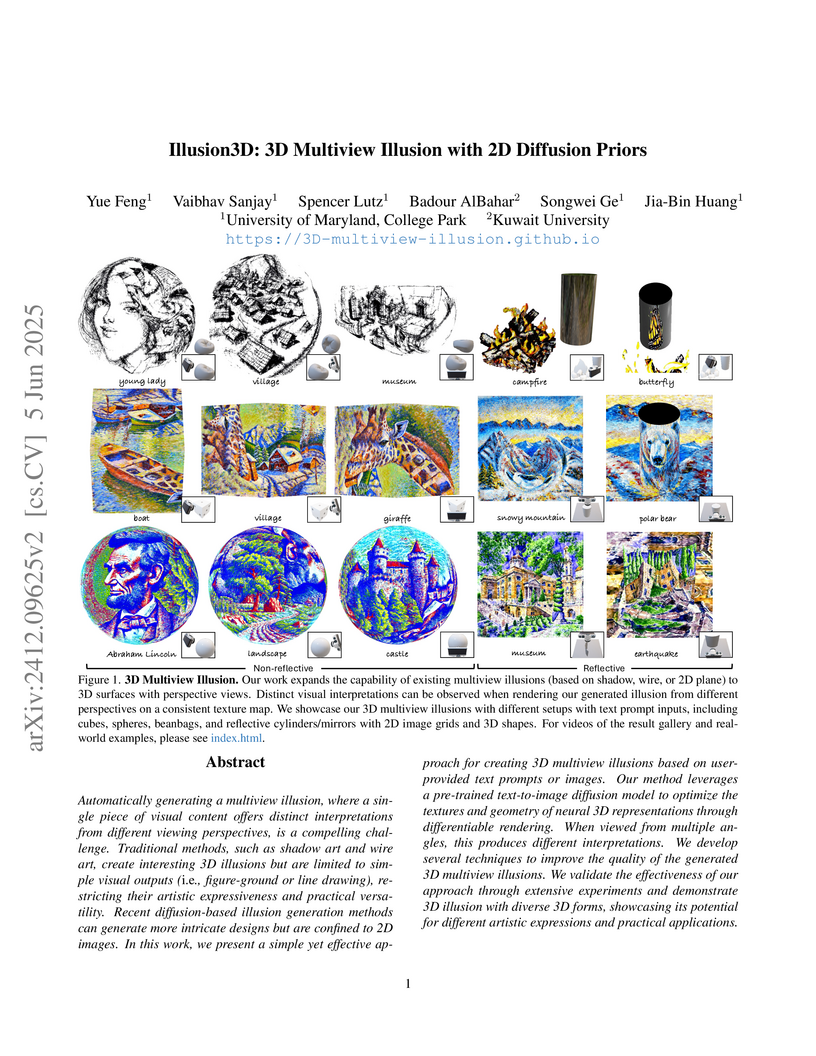
Automatically generating multiview illusions is a compelling challenge, where
a single piece of visual content offers distinct interpretations from different
viewing perspectives. Traditional methods, such as shadow art and wire art,
create interesting 3D illusions but are limited to simple visual outputs (i.e.,
figure-ground or line drawing), restricting their artistic expressiveness and
practical versatility. Recent diffusion-based illusion generation methods can
generate more intricate designs but are confined to 2D images. In this work, we
present a simple yet effective approach for creating 3D multiview illusions
based on user-provided text prompts or images. Our method leverages a
pre-trained text-to-image diffusion model to optimize the textures and geometry
of neural 3D representations through differentiable rendering. When viewed from
multiple angles, this produces different interpretations. We develop several
techniques to improve the quality of the generated 3D multiview illusions. We
demonstrate the effectiveness of our approach through extensive experiments and
showcase illusion generation with diverse 3D forms.
28 Jan 2025
This paper directs attention to conceptual modeling approaches that integrate advancements and innovations in requirements engineering. In some current (2024) works, it is claimed that present elicitation of requirements models focus on collecting information using natural language, which yields ambiguous specifications. It is proposed that a solution to this problem involves using complexity theory, transdisciplinarity, multidimensionality and knowledge management. Examples are used to demonstrate how such an approach helps solve the problem of quality and reliability in requirements engineering. The modeling method includes flowchart-like diagrams that show the relationships among system components and values in various modes of operation as well as path graphs that represent the system behavior. This paper focuses on the diagrammatic techniques in such approaches, with special attention directed to flowcharting (e.g., UML activity diagrams, business process model and notation (BPMN) business process diagrams). We claim that diagramming methods based on flowcharts is an outdated technique, and we promote an alternative diagrammatic modeling methodology based on thinging machines (TMs). TMs involve a high-level diagrammatic representation of a real-world system that integrates various component specifications to be refined into a more concrete executable form. TM modeling is a valuable tool to integrate requirements elicitation and address present challenges comprehensively. To demonstrate that, case studies are re-modeled using TMs. A TM model involves static, dynamic diagrams and event chronology charts. This study contrasts the flowchart-based and the TM approaches. The results point to the benefits of adopting the TM diagramming method.

28 Sep 2025
In this note we propose a basic -based approach for studying the global and local energy equalities of the incompressible 3D Navier-Stokes equations in the standard energy class on . Motivated by L. Onsager's principle of least dissipation of energy (1931), we give a new sufficient condition for the energy equalities in terms of the limit of a sequence of minimizers. In particular, we show that the equalities are attained if this limit is non-vanishing. We observe that the indeterminacy in the vanishing case is reminiscent of turbulence-driven energy transfer dominating other transport processes.
07 Sep 2021
This chapter is an up-to-date account of results on globally hyperbolic spacetimes, and serves several purposes. We begin with the exposition of results from a foundational level, where the main tools are order theory and general topology, we continue with results of a more geometric nature, and we conclude with results that are related to current research in theoretical physics. In each case, we list a number of open questions and formulate, for a class of spacetimes, an interesting connection between global hyperbolicity of a manifold and the geodesic completeness of its corresponding space-like surfaces. This connection is substantial for the proof of essential self-adjointness of a class of pseudo differential operators, that stem from relativistic quantum field theory.

13 Feb 2023
A general position set S is a set S of vertices in G(V,E) such that no three vertices of S lie on a shortest path in G. Such a set of maximum size in G is called a gpset of G and its cardinality is called the gp-number of G denoted by gp(G). The authors who introduced the general position problem stated that the general position problem for butterfly networks was open. A well-known technique to solve the general position problem for a given network is to use its isometric path cover number as an upper bound. The general position problem for butterfly networks remained open because this technique is not applicable for butterfly networks. In this paper, we adopt a new technique which uses the isometric cycle cover number as its upper bound. This technique is interesting and useful because it opens new avenues to solve the general position problem for networks which do not have solutions yet.

21 Sep 2023
 University of Science and Technology of ChinaAristotle University of ThessalonikiUniversity of IoanninaUniversity of PatrasKuwait UniversityDemocritus University of ThraceAstronomical Institute of the Czech Academy of SciencesNational Observatory of AthensEuropean University CyprusAcademy of AthensSPACE ASICS S.A.Institute of Astrophysics, Foundation for Research and Innovation - Hellas* National and Kapodistrian University of Athens
University of Science and Technology of ChinaAristotle University of ThessalonikiUniversity of IoanninaUniversity of PatrasKuwait UniversityDemocritus University of ThraceAstronomical Institute of the Czech Academy of SciencesNational Observatory of AthensEuropean University CyprusAcademy of AthensSPACE ASICS S.A.Institute of Astrophysics, Foundation for Research and Innovation - Hellas* National and Kapodistrian University of AthensThe Laser Interferometer Space Antenna (LISA) mission, scheduled for launch
in the mid-2030s, is a gravitational wave observatory in space designed to
detect sources emitting in the millihertz band. LISA is an ESA flagship
mission, currently entering the Phase B development phase. It is expected to
help us improve our understanding about our Universe by measuring gravitational
wave sources of different types, with some of the sources being at very high
redshifts . On the 23rd of February 2022 we organized the
1 {\it LISA in Greece Workshop}. This workshop aimed to inform
the Greek scientific and tech industry community about the possibilities of
participating in LISA science and LISA mission, with the support of the
Hellenic Space Center (HSC). In this white paper, we summarize the outcome of
the workshop, the most important aspect of it being the inclusion of Greek
researchers to the LISA Consortium, raising our total number to . At the
same time, we present a road-map with the future steps and actions of the Greek
Gravitational Wave community with respect to the future LISA mission.

16 Mar 2025


This study presents an emotion-aware navigation framework -- EmoBipedNav --
using deep reinforcement learning (DRL) for bipedal robots walking in socially
interactive environments. The inherent locomotion constraints of bipedal robots
challenge their safe maneuvering capabilities in dynamic environments. When
combined with the intricacies of social environments, including pedestrian
interactions and social cues, such as emotions, these challenges become even
more pronounced. To address these coupled problems, we propose a two-stage
pipeline that considers both bipedal locomotion constraints and complex social
environments. Specifically, social navigation scenarios are represented using
sequential LiDAR grid maps (LGMs), from which we extract latent features,
including collision regions, emotion-related discomfort zones, social
interactions, and the spatio-temporal dynamics of evolving environments. The
extracted features are directly mapped to the actions of reduced-order models
(ROMs) through a DRL architecture. Furthermore, the proposed framework
incorporates full-order dynamics and locomotion constraints during training,
effectively accounting for tracking errors and restrictions of the locomotion
controller while planning the trajectory with ROMs. Comprehensive experiments
demonstrate that our approach exceeds both model-based planners and DRL-based
baselines. The hardware videos and open-source code are available at
this https URL

11 Oct 2024
The metric dimension of a graph measures how uniquely vertices may be
identified using a set of landmark vertices. This concept is frequently used in
the study of network architecture, location-based problems and communication.
Given a graph , the metric dimension, denoted as , is the minimum
size of a resolving set, a subset of vertices such that for every pair of
vertices in , there exists a vertex in the resolving set whose shortest path
distance to the two vertices is different. This subset of vertices helps to
uniquely determine the location of other vertices in the graph. A basis is a
resolving set with a least cardinality. Finding a basis is a problem with
practical applications in network design, where it is important to efficiently
locate and identify nodes based on a limited set of reference points. The
Cartesian product of and is the grid network in network science. In
this paper, we investigate two novel types of grids in network science: the
Villarceau grid Type I and Type II. For each of these grid types, we find the
precise metric dimension.

03 Dec 2018
A control model is typically classified into three forms: conceptual,
mathematical and simulation (computer). This paper analyzes a conceptual
modeling application with respect to an inventory management system. Today,
most organizations utilize computer systems for inventory control that provide
protection when interruptions or breakdowns occur within work processes.
Modeling the inventory processes is an active area of research that utilizes
many diagrammatic techniques, including data flow diagrams, Universal Modeling
Language (UML) diagrams and Integration DEFinition (IDEF). We claim that
current conceptual modeling frameworks lack uniform notions and have inability
to appeal to designers and analysts. We propose modeling an inventory system as
an abstract machine, called a Thinging Machine (TM), with five operations:
creation, processing, receiving, releasing and transferring. The paper provides
side-by-side contrasts of some existing examples of conceptual modeling
methodologies that apply to TM. Additionally, TM is applied in a case study of
an actual inventory system that uses IBM Maximo. The resulting conceptual
depictions point to the viability of FM as a valuable tool for developing a
high-level representation of inventory processes.

13 Mar 2019
Motivated by a recent work by Yongwan Gim, Hwajin Um, and Wontae Kim, we
investigate the validity of the no-cloning theorem in the context of
generalized uncertainty principle. In particular, in the presence of linear and
quadratic terms of momentum in generalized uncertainty principle, we first
compute the energy density at a given modified temperature and then using the
modified Stefan-Boltzmann law we derive the modified Page time. Finally, we
calculate the modified required energy for the information to be encoded into a
message and be sent to an observer inside the black hole.

18 Nov 2023
We compute the relative entropy between the vacuum and a coherent state for a massive scalar field in de Sitter spacetime, using Tomita-Takesaki modular theory and the Araki-Uhlmann formula for the relative entropy. Embedding de Sitter spacetime as a hyperboloid in the ambient Minkowski space, we can restrict the Minkowski wedge and the corresponding modular operator to de Sitter, and we verify that this construction gives the correct modular flow. We check that the relative entropy is positive and jointly convex, relate it to the Noether charge of translations along the trajectories of the modular flow, and determine the local temperature as seen by an observer that moves along these trajectories.

06 May 2019
Motivated by the works on Equivalence Principle in the context of linear
Generalized Uncertainty Principle and, independently, in the context of
quadratic Generalized Uncertainty Principle, we expand these endeavors in the
context of Generalized Uncertainty Principle when both linear and quadratic
terms in momentum are include. We demonstrate how the definitions of equations
of motion change upon that expansion. We also show how to obtain an analogue of
Liouville theorem in the presence of linear and quadratic Generalized
Uncertainty Principle. We employ the corresponding modified invariant unit
volume of phase space to discuss the resulting density of states, the problem
of cosmological constant, the black body radiation in curved spacetime, the
concurrent energy and consequent no Brick Wall entropy.

22 Dec 2019
The spectroscopic properties of the odd-odd isotopes Cs have been studied within the interacting boson-fermion-fermion model based on the Gogny-D1M energy density functional framework. Major ingredients to build the interacting boson-fermion-fermion Hamiltonian, such as the ()-deformation energy surfaces for the even-even core nuclei Xe as well as single-particle energies and occupation probabilities of the odd nucleons, have been computed microscopically with the constrained Hartree-Fock-Bogoliubov method. A few coupling constants of the boson-fermion and residual neutron-proton interactions are fitted to reproduce with a reasonable accuracy the experimental excitation energy of the low-lying levels of the odd-mass and odd-odd nuclei. The method is applied to describe the low-energy low-spin spectra of the odd-odd Cs nuclei and the band structures of higher-spin higher-energy states, mainly based on the configuration. Many of those odd-odd Cs nuclei have been identified as candidates for exhibiting chiral doublet bands.
15 Apr 2024
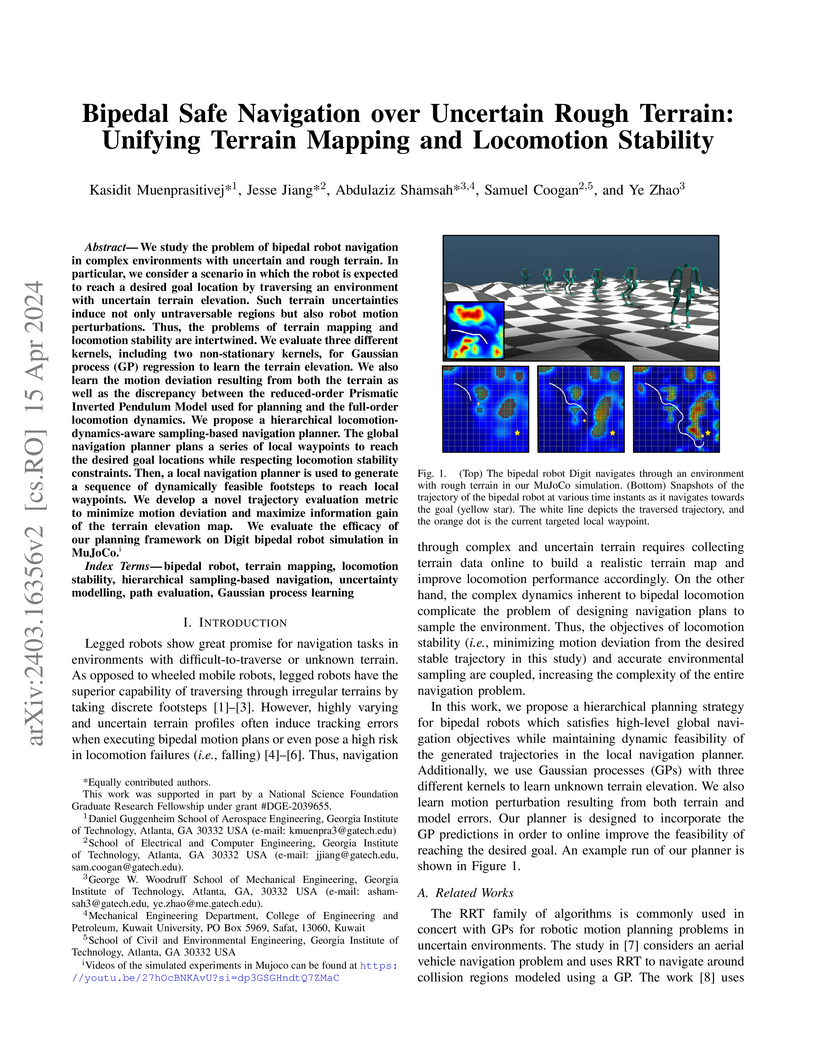
We study the problem of bipedal robot navigation in complex environments with uncertain and rough terrain. In particular, we consider a scenario in which the robot is expected to reach a desired goal location by traversing an environment with uncertain terrain elevation. Such terrain uncertainties induce not only untraversable regions but also robot motion perturbations. Thus, the problems of terrain mapping and locomotion stability are intertwined. We evaluate three different kernels for Gaussian process (GP) regression to learn the terrain elevation. We also learn the motion deviation resulting from both the terrain as well as the discrepancy between the reduced-order Prismatic Inverted Pendulum Model used for planning and the full-order locomotion dynamics. We propose a hierarchical locomotion-dynamics-aware sampling-based navigation planner. The global navigation planner plans a series of local waypoints to reach the desired goal locations while respecting locomotion stability constraints. Then, a local navigation planner is used to generate a sequence of dynamically feasible footsteps to reach local waypoints. We develop a novel trajectory evaluation metric to minimize motion deviation and maximize information gain of the terrain elevation map. We evaluate the efficacy of our planning framework on Digit bipedal robot simulation in MuJoCo.
There are no more papers matching your filters at the moment.
