
26 Aug 2021


We introduce TensorFlow Quantum (TFQ), an open source library for the rapid
prototyping of hybrid quantum-classical models for classical or quantum data.
This framework offers high-level abstractions for the design and training of
both discriminative and generative quantum models under TensorFlow and supports
high-performance quantum circuit simulators. We provide an overview of the
software architecture and building blocks through several examples and review
the theory of hybrid quantum-classical neural networks. We illustrate TFQ
functionalities via several basic applications including supervised learning
for quantum classification, quantum control, simulating noisy quantum circuits,
and quantum approximate optimization. Moreover, we demonstrate how one can
apply TFQ to tackle advanced quantum learning tasks including meta-learning,
layerwise learning, Hamiltonian learning, sampling thermal states, variational
quantum eigensolvers, classification of quantum phase transitions, generative
adversarial networks, and reinforcement learning. We hope this framework
provides the necessary tools for the quantum computing and machine learning
research communities to explore models of both natural and artificial quantum
systems, and ultimately discover new quantum algorithms which could potentially
yield a quantum advantage.
18 Jul 2024


Most recent successes in robot reinforcement learning involve learning a
specialized single-task agent.
However, robots capable of performing multiple tasks can be much more
valuable in real-world applications.
Multi-task reinforcement learning can be very challenging due to the
increased sample complexity and the potentially conflicting task objectives.
Previous work on this topic is dominated by model-free approaches.
The latter can be very sample inefficient even when learning specialized
single-task agents.
In this work, we focus on model-based multi-task reinforcement learning.
We propose a method for learning multi-task visual world models, leveraging
pre-trained language models to extract semantically meaningful task
representations.
These representations are used by the world model and policy to reason about
task similarity in dynamics and behavior.
Our results highlight the benefits of using language-driven task
representations for world models and a clear advantage of model-based
multi-task learning over the more common model-free paradigm.
04 Aug 2020
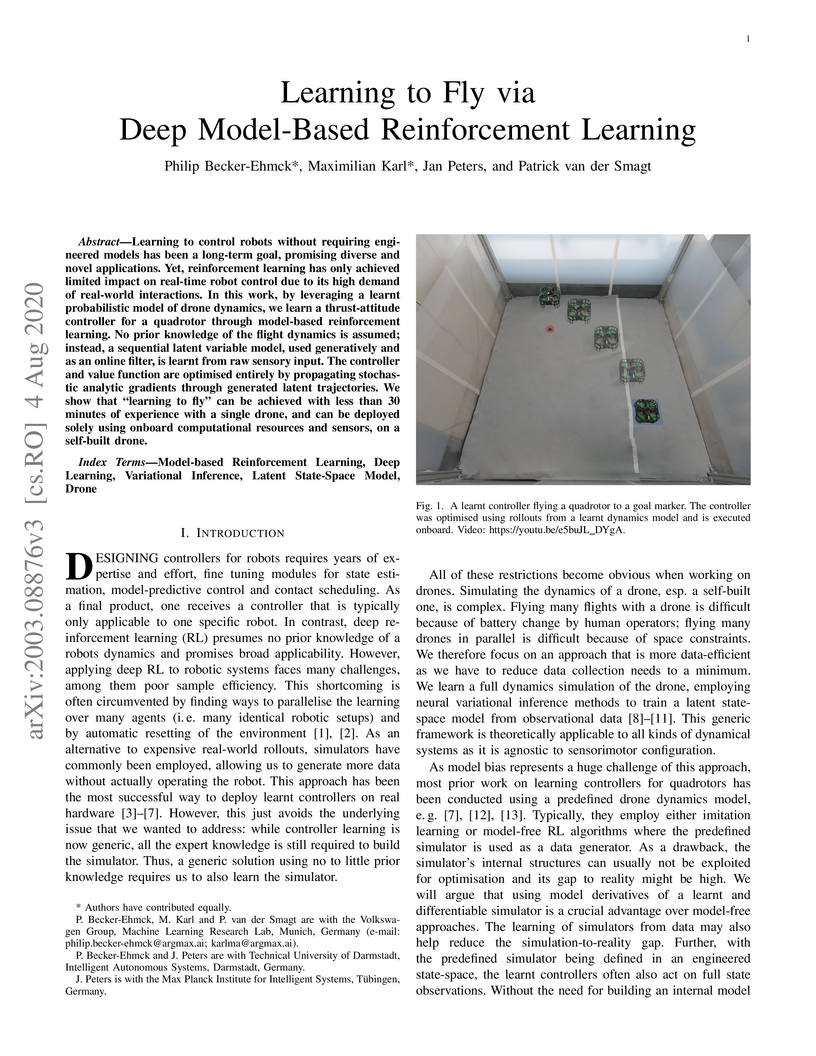
Learning to control robots without requiring engineered models has been a long-term goal, promising diverse and novel applications. Yet, reinforcement learning has only achieved limited impact on real-time robot control due to its high demand of real-world interactions. In this work, by leveraging a learnt probabilistic model of drone dynamics, we learn a thrust-attitude controller for a quadrotor through model-based reinforcement learning. No prior knowledge of the flight dynamics is assumed; instead, a sequential latent variable model, used generatively and as an online filter, is learnt from raw sensory input. The controller and value function are optimised entirely by propagating stochastic analytic gradients through generated latent trajectories. We show that "learning to fly" can be achieved with less than 30 minutes of experience with a single drone, and can be deployed solely using onboard computational resources and sensors, on a self-built drone.

12 Aug 2025
Operationalizing the EU AI Act requires clear technical documentation to ensure AI systems are transparent, traceable, and accountable. Existing documentation templates for AI systems do not fully cover the entire AI lifecycle while meeting the technical documentation requirements of the AI Act.
This paper addresses those shortcomings by introducing open-source templates and examples for documenting data, models, and applications to provide sufficient documentation for certifying compliance with the AI Act. These templates track the system status over the entire AI lifecycle, ensuring traceability, reproducibility, and compliance with the AI Act. They also promote discoverability and collaboration, reduce risks, and align with best practices in AI documentation and governance.
The templates are evaluated and refined based on user feedback to enable insights into their usability and implementability. We then validate the approach on real-world scenarios, providing examples that further guide their implementation: the data template is followed to document a skin tones dataset created to support fairness evaluations of downstream computer vision models and human-centric applications; the model template is followed to document a neural network for segmenting human silhouettes in photos. The application template is tested on a system deployed for construction site safety using real-time video analytics and sensor data. Our results show that TechOps can serve as a practical tool to enable oversight for regulatory compliance and responsible AI development.

29 Apr 2024
We study the choice of action space in robot manipulation learning and sim-to-real transfer. We define metrics that assess the performance, and examine the emerging properties in the different action spaces. We train over 250 reinforcement learning~(RL) agents in simulated reaching and pushing tasks, using 13 different control spaces. The choice of spaces spans combinations of common action space design characteristics. We evaluate the training performance in simulation and the transfer to a real-world environment. We identify good and bad characteristics of robotic action spaces and make recommendations for future designs. Our findings have important implications for the design of RL algorithms for robot manipulation tasks, and highlight the need for careful consideration of action spaces when training and transferring RL agents for real-world robotics.
08 Aug 2025
Multi-modality magnetic resonance imaging(MRI) data facilitate the early diagnosis, tumor segmentation, and disease staging in the management of nasopharyngeal carcinoma (NPC). The lack of publicly available, comprehensive datasets limits advancements in diagnosis, treatment planning, and the development of machine learning algorithms for NPC. Addressing this critical need, we introduce the first comprehensive NPC MRI dataset, encompassing MR axial imaging of 277 primary NPC patients. This dataset includes T1-weighted, T2-weighted, and contrast-enhanced T1-weighted sequences, totaling 831 scans. In addition to the corresponding clinical data, manually annotated and labeled segmentations by experienced radiologists offer high-quality data resources from untreated primary NPC.

06 Nov 2020

The binary paint shop problem (BPSP) is an APX-hard optimization problem of
the automotive industry. In this work, we show how to use the Quantum
Approximate Optimization Algorithm (QAOA) to find solutions of the BPSP and
demonstrate that QAOA with constant depth is able to beat classical heuristics
on average in the infinite size limit . For the BPSP, it is
known that no classical algorithm can exist which approximates the problem in
polynomial runtime. We introduce a BPSP instance which is hard to solve with
QAOA, and numerically investigate its performance and discuss QAOA's ability to
generate approximate solutions. We complete our studies by running first
experiments of small-sized instances on a trapped-ion quantum computer through
AWS Braket.

27 Jan 2019
In this paper we propose a Bayesian method for estimating architectural
parameters of neural networks, namely layer size and network depth. We do this
by learning concrete distributions over these parameters. Our results show that
regular networks with a learnt structure can generalise better on small
datasets, while fully stochastic networks can be more robust to parameter
initialisation. The proposed method relies on standard neural variational
learning and, unlike randomised architecture search, does not require a
retraining of the model, thus keeping the computational overhead at minimum.

13 Nov 2020
Quantum circuits with local particle number conservation (LPNC) restrict the quantum computation to a subspace of the Hilbert space of the qubit register. In a noiseless or fault-tolerant quantum computation, such quantities are preserved. In the presence of noise, however, the evolution's symmetry could be broken and non-valid states could be sampled at the end of the computation. On the other hand, the restriction to a subspace in the ideal case suggest the possibility of more resource efficient error mitigation techniques for circuits preserving symmetries that are not possible for general circuits. Here, we analyze the probability of staying in such symmetry-preserved subspaces under noise, providing an exact formula for local depolarizing noise. We apply our findings to benchmark, under depolarizing noise, the symmetry robustness of XY-QAOA, which has local particle number conserving symmetries, and is a special case of the Quantum Alternating Operator Ansatz. We also analyze the influence of the choice of encoding the problem on the symmetry robustness of the algorithm and discuss a simple adaption of the bit flip code to correct for symmetry-breaking errors with reduced resources.

12 May 2025
Volkswagen Group and academic researchers develop QUEST, a quantum-enhanced framework for optimizing vehicle pairing in shared transportation through aerodynamic drafting, implementing the solution using QAOA on IBM's quantum hardware while demonstrating successful problem encoding and identifying key hardware limitations for practical deployment.

09 Nov 2024

This paper introduces a collaborative, human-centred taxonomy of AI,
algorithmic and automation harms. We argue that existing taxonomies, while
valuable, can be narrow, unclear, typically cater to practitioners and
government, and often overlook the needs of the wider public. Drawing on
existing taxonomies and a large repository of documented incidents, we propose
a taxonomy that is clear and understandable to a broad set of audiences, as
well as being flexible, extensible, and interoperable. Through iterative
refinement with topic experts and crowdsourced annotation testing, we propose a
taxonomy that can serve as a powerful tool for civil society organisations,
educators, policymakers, product teams and the general public. By fostering a
greater understanding of the real-world harms of AI and related technologies,
we aim to increase understanding, empower NGOs and individuals to identify and
report violations, inform policy discussions, and encourage responsible
technology development and deployment.

12 Aug 2020
Measuring the similarity between data points often requires domain knowledge,
which can in parts be compensated by relying on unsupervised methods such as
latent-variable models, where similarity/distance is estimated in a more
compact latent space. Prevalent is the use of the Euclidean metric, which has
the drawback of ignoring information about similarity of data stored in the
decoder, as captured by the framework of Riemannian geometry. We propose an
extension to the framework of variational auto-encoders allows learning flat
latent manifolds, where the Euclidean metric is a proxy for the similarity
between data points. This is achieved by defining the latent space as a
Riemannian manifold and by regularising the metric tensor to be a scaled
identity matrix. Additionally, we replace the compact prior typically used in
variational auto-encoders with a recently presented, more expressive
hierarchical one---and formulate the learning problem as a constrained
optimisation problem. We evaluate our method on a range of data-sets, including
a video-tracking benchmark, where the performance of our unsupervised approach
nears that of state-of-the-art supervised approaches, while retaining the
computational efficiency of straight-line-based approaches.
23 Apr 2025
Pretraining and finetuning models has become increasingly popular in
decision-making. But there are still serious impediments in Imitation Learning
from Observation (ILfO) with pretrained models. This study identifies two
primary obstacles: the Embodiment Knowledge Barrier (EKB) and the Demonstration
Knowledge Barrier (DKB). The EKB emerges due to the pretrained models'
limitations in handling novel observations, which leads to inaccurate action
inference. Conversely, the DKB stems from the reliance on limited demonstration
datasets, restricting the model's adaptability across diverse scenarios. We
propose separate solutions to overcome each barrier and apply them to Action
Inference by Maximising Evidence (AIME), a state-of-the-art algorithm. This new
algorithm, AIME-NoB, integrates online interactions and a data-driven
regulariser to mitigate the EKB. Additionally, it uses a surrogate reward
function to broaden the policy's supported states, addressing the DKB. Our
experiments on vision-based control tasks from the DeepMind Control Suite and
MetaWorld benchmarks show that AIME-NoB significantly improves sample
efficiency and converged performance, presenting a robust framework for
overcoming the challenges in ILfO with pretrained models. Code available at
this https URL

08 Feb 2018
Neural samplers such as variational autoencoders (VAEs) or generative
adversarial networks (GANs) approximate distributions by transforming samples
from a simple random source---the latent space---to samples from a more complex
distribution represented by a dataset. While the manifold hypothesis implies
that the density induced by a dataset contains large regions of low density,
the training criterions of VAEs and GANs will make the latent space densely
covered. Consequently points that are separated by low-density regions in
observation space will be pushed together in latent space, making stationary
distances poor proxies for similarity. We transfer ideas from Riemannian
geometry to this setting, letting the distance between two points be the
shortest path on a Riemannian manifold induced by the transformation. The
method yields a principled distance measure, provides a tool for visual
inspection of deep generative models, and an alternative to linear
interpolation in latent space. In addition, it can be applied for robot
movement generalization using previously learned skills. The method is
evaluated on a synthetic dataset with known ground truth; on a simulated robot
arm dataset; on human motion capture data; and on a generative model of
handwritten digits.
03 Nov 2017
Kjolstad et. al. proposed a tensor algebra compiler. It takes expressions
that define a tensor element-wise, such as $f_{ij}(a,b,c,d) =
\exp\left[-\sum_{k=0}^4 \left((a_{ik}+b_{jk})^2\, c_{ii} + d_{i+k}^3 \right)
\right]$, and generates the corresponding compute kernel code.
For machine learning, especially deep learning, it is often necessary to
compute the gradient of a loss function with respect
to parameters . If tensor compilers are to be applied in this field,
it is necessary to derive expressions for the derivatives of element-wise
defined tensors, i.e. expressions for .
When the mapping between function indices and argument indices is not 1:1,
special attention is required. For the function , the
derivative of the loss is $(dx)_i=\partial l/\partial x_i=\sum_j
(df)_{ij}2x_ij$ does not appear in the
indices of . Another example is , where is a matrix;
here we have ; the Kronecker delta is
necessary because the derivative is zero for off-diagonal elements. Another
indexing scheme is used by ; here the correct
derivative is , where the range of the
sum must be chosen appropriately.
In this publication we present an algorithm that can handle any case in which
the indices of an argument are an arbitrary linear combination of the indices
of the function, thus all the above examples can be handled. Sums (and their
ranges) and Kronecker deltas are automatically inserted into the derivatives as
necessary. Additionally, the indices are transformed, if required (as in the
last example). The algorithm outputs a symbolic expression that can be
subsequently fed into a tensor algebra compiler.
Source code is provided.
29 May 2019
System identification of complex and nonlinear systems is a central problem for model predictive control and model-based reinforcement learning. Despite their complexity, such systems can often be approximated well by a set of linear dynamical systems if broken into appropriate subsequences. This mechanism not only helps us find good approximations of dynamics, but also gives us deeper insight into the underlying system. Leveraging Bayesian inference, Variational Autoencoders and Concrete relaxations, we show how to learn a richer and more meaningful state space, e.g. encoding joint constraints and collisions with walls in a maze, from partial and high-dimensional observations. This representation translates into a gain of accuracy of learned dynamics showcased on various simulated tasks.

06 Dec 2022
We introduce PRISM, a method for real-time filtering in a probabilistic generative model of agent motion and visual perception. Previous approaches either lack uncertainty estimates for the map and agent state, do not run in real-time, do not have a dense scene representation or do not model agent dynamics. Our solution reconciles all of these aspects. We start from a predefined state-space model which combines differentiable rendering and 6-DoF dynamics. Probabilistic inference in this model amounts to simultaneous localisation and mapping (SLAM) and is intractable. We use a series of approximations to Bayesian inference to arrive at probabilistic map and state estimates. We take advantage of well-established methods and closed-form updates, preserving accuracy and enabling real-time capability. The proposed solution runs at 10Hz real-time and is similarly accurate to state-of-the-art SLAM in small to medium-sized indoor environments, with high-speed UAV and handheld camera agents (Blackbird, EuRoC and TUM-RGBD).

11 Mar 2025
A probabilistic graphical model is proposed, modeling the joint model
parameter and multiplier evolution, with a hypervolume based likelihood,
promoting multi-objective descent in structural risk minimization. We address
multi-objective model parameter optimization via a surrogate single objective
penalty loss with time-varying multipliers, equivalent to online scheduling of
loss landscape. The multi-objective descent goal is dispatched hierarchically
into a series of constraint optimization sub-problems with shrinking bounds
according to Pareto dominance. The bound serves as setpoint for the low-level
multiplier controller to schedule loss landscapes via output feedback of each
loss term. Our method forms closed loop of model parameter dynamic, circumvents
excessive memory requirements and extra computational burden of existing
multi-objective deep learning methods, and is robust against controller
hyperparameter variation, demonstrated on domain generalization tasks with
multi-dimensional regularization losses.

21 Mar 2024
Poor generalization performance caused by distribution shifts in unseen
domains often hinders the trustworthy deployment of deep neural networks. Many
domain generalization techniques address this problem by adding a domain
invariant regularization loss terms during training. However, there is a lack
of modular software that allows users to combine the advantages of different
methods with minimal effort for reproducibility. DomainLab is a modular Python
package for training user specified neural networks with composable
regularization loss terms. Its decoupled design allows the separation of neural
networks from regularization loss construction. Hierarchical combinations of
neural networks, different domain generalization methods, and associated
hyperparameters, can all be specified together with other experimental setup in
a single configuration file. Hierarchical combinations of neural networks,
different domain generalization methods, and associated hyperparameters, can
all be specified together with other experimental setup in a single
configuration file. In addition, DomainLab offers powerful benchmarking
functionality to evaluate the generalization performance of neural networks in
out-of-distribution data. The package supports running the specified benchmark
on an HPC cluster or on a standalone machine. The package is well tested with
over 95 percent coverage and well documented. From the user perspective, it is
closed to modification but open to extension. The package is under the MIT
license, and its source code, tutorial and documentation can be found at
this https URL

15 Jan 2025
In offline reinforcement learning, a policy is learned using a static dataset
in the absence of costly feedback from the environment. In contrast to the
online setting, only using static datasets poses additional challenges, such as
policies generating out-of-distribution samples. Model-based offline
reinforcement learning methods try to overcome these by learning a model of the
underlying dynamics of the environment and using it to guide policy search. It
is beneficial but, with limited datasets, errors in the model and the issue of
value overestimation among out-of-distribution states can worsen performance.
Current model-based methods apply some notion of conservatism to the Bellman
update, often implemented using uncertainty estimation derived from model
ensembles. In this paper, we propose Constrained Latent Action Policies (C-LAP)
which learns a generative model of the joint distribution of observations and
actions. We cast policy learning as a constrained objective to always stay
within the support of the latent action distribution, and use the generative
capabilities of the model to impose an implicit constraint on the generated
actions. Thereby eliminating the need to use additional uncertainty penalties
on the Bellman update and significantly decreasing the number of gradient steps
required to learn a policy. We empirically evaluate C-LAP on the D4RL and
V-D4RL benchmark, and show that C-LAP is competitive to state-of-the-art
methods, especially outperforming on datasets with visual observations.
There are no more papers matching your filters at the moment.
