02 Jun 2025
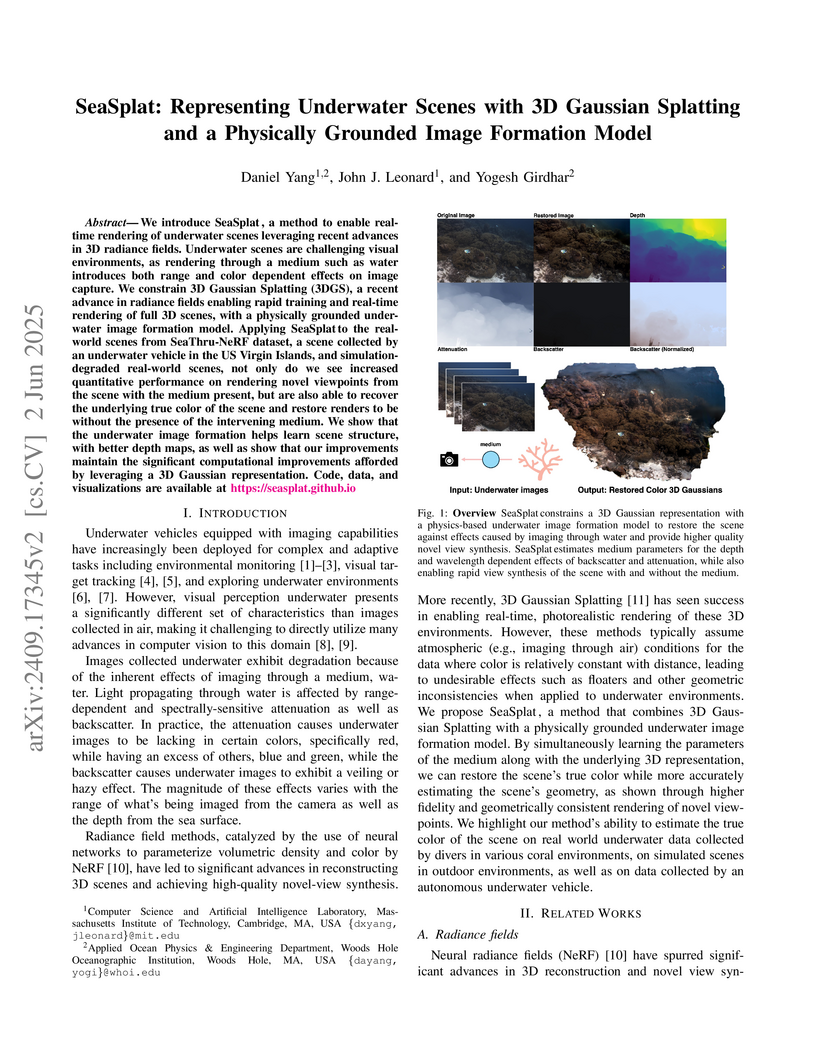
We introduce SeaSplat, a method to enable real-time rendering of underwater
scenes leveraging recent advances in 3D radiance fields. Underwater scenes are
challenging visual environments, as rendering through a medium such as water
introduces both range and color dependent effects on image capture. We
constrain 3D Gaussian Splatting (3DGS), a recent advance in radiance fields
enabling rapid training and real-time rendering of full 3D scenes, with a
physically grounded underwater image formation model. Applying SeaSplat to the
real-world scenes from SeaThru-NeRF dataset, a scene collected by an underwater
vehicle in the US Virgin Islands, and simulation-degraded real-world scenes,
not only do we see increased quantitative performance on rendering novel
viewpoints from the scene with the medium present, but are also able to recover
the underlying true color of the scene and restore renders to be without the
presence of the intervening medium. We show that the underwater image formation
helps learn scene structure, with better depth maps, as well as show that our
improvements maintain the significant computational improvements afforded by
leveraging a 3D Gaussian representation.

07 Mar 2025
Controlling AUVs can be challenging because of the effect of complex
non-linear hydrodynamic forces acting on the robot, which are significant in
water and cannot be ignored. The problem is exacerbated for small AUVs for
which the dynamics can change significantly with payload changes and
deployments under different hydrodynamic conditions. The common approach to AUV
control is a combination of passive stabilization with added buoyancy on top
and weights on the bottom, and a PID controller tuned for simple and smooth
motion primitives. However, the approach comes at the cost of sluggish controls
and often the need to re-tune controllers with configuration changes. In this
paper, we propose a fast (trainable in minutes), reinforcement learning-based
approach for full 6 degree of freedom (DOF) control of a thruster-driven AUVs,
taking 6-DOF command-conditioned inputs direct to thruster outputs. We present
a new, highly parallelized simulator for underwater vehicle dynamics. We
demonstrate this approach through zero-shot sim-to-real (with no tuning)
transfer onto a real AUV that produces comparable results to hand-tuned PID
controllers. Furthermore, we show that domain randomization on the simulator
produces policies that are robust to small variations in vehicle's physical
parameters.

15 May 2023


Adaptive Bias Correction (ABC), a hybrid machine learning framework, enhances subseasonal forecasts by correcting persistent systematic errors in operational dynamical models. The method significantly boosts temperature and precipitation forecasting skill by 40-289% and identifies climate-dependent "windows of opportunity" for targeted deployment.

17 Jul 2025







Climate change is one of the defining challenges of the 21st century, and many in the robotics community are looking for ways to contribute. This paper presents a roadmap for climate-relevant robotics research, identifying high-impact opportunities for collaboration between roboticists and experts across climate domains such as energy, the built environment, transportation, industry, land use, and Earth sciences. These applications include problems such as energy systems optimization, construction, precision agriculture, building envelope retrofits, autonomous trucking, and large-scale environmental monitoring. Critically, we include opportunities to apply not only physical robots but also the broader robotics toolkit - including planning, perception, control, and estimation algorithms - to climate-relevant problems. A central goal of this roadmap is to inspire new research directions and collaboration by highlighting specific, actionable problems at the intersection of robotics and climate. This work represents a collaboration between robotics researchers and domain experts in various climate disciplines, and it serves as an invitation to the robotics community to bring their expertise to bear on urgent climate priorities.
14 Oct 2021

Developing fast and accurate surrogates for physics-based coastal and ocean models is an urgent need due to the coastal flood risk under accelerating sea level rise, and the computational expense of deterministic numerical models. For this purpose, we develop the first digital twin of Earth coastlines with new physics-informed machine learning techniques extending the state-of-art Neural Operator. As a proof-of-concept study, we built Fourier Neural Operator (FNO) surrogates on the simulations of an industry-standard flood and ocean model (NEMO). The resulting FNO surrogate accurately predicts the sea surface height in most regions while achieving upwards of 45x acceleration of NEMO. We delivered an open-source \textit{CoastalTwin} platform in an end-to-end and modular way, to enable easy extensions to other simulations and ML-based surrogate methods. Our results and deliverable provide a promising approach to massively accelerate coastal dynamics simulators, which can enable scientists to efficiently execute many simulations for decision-making, uncertainty quantification, and other research activities.
28 Sep 2024
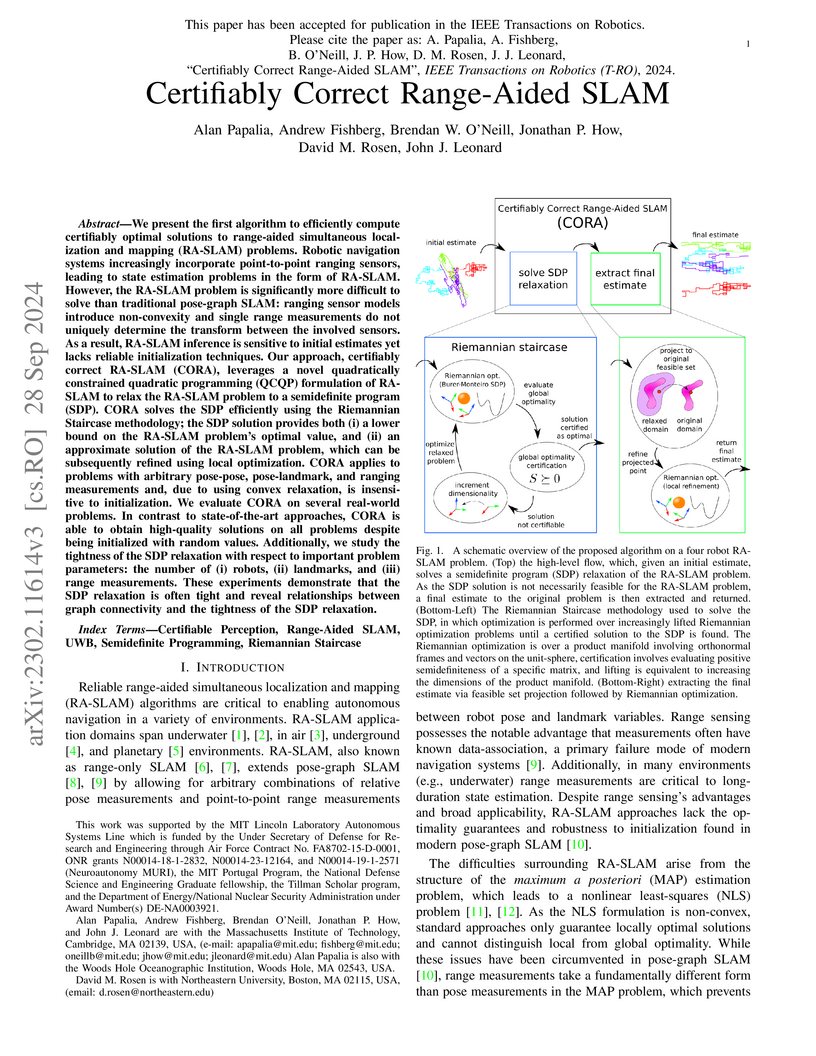
Researchers at MIT and Woods Hole Oceanographic Institution developed CORA, an algorithm that efficiently computes certifiably optimal solutions for Range-Aided Simultaneous Localization and Mapping (RA-SLAM). This method consistently delivers accurate and robust state estimation, even with random initialization, and often outperforms state-of-the-art local optimizers in real-world scenarios.

12 Jul 2021

Researchers introduced tuning-free and self-tuning online learning algorithms that integrate optimism to effectively handle delayed feedback, achieving minimax optimal regret rates. These algorithms demonstrated superior performance in subseasonal climate forecasting tasks, often outperforming the best single models over a decade.

16 Jan 2024
Researchers introduced SubseasonalClimateUSA, a curated and regularly updated dataset designed for machine learning-based subseasonal weather forecasting in the contiguous U.S. Benchmarking efforts demonstrated that adaptive bias correction models consistently outperformed leading operational dynamical models and complex deep learning methods in predicting temperature and precipitation for weeks 3-6 ahead.

07 Mar 2023
Successful applications of complex vision-based behaviours underwater have lagged behind progress in terrestrial and aerial domains. This is largely due to the degraded image quality resulting from the physical phenomena involved in underwater image formation. Spectrally-selective light attenuation drains some colors from underwater images while backscattering adds others, making it challenging to perform vision-based tasks underwater. State-of-the-art methods for underwater color correction optimize the parameters of image formation models to restore the full spectrum of color to underwater imagery. However, these methods have high computational complexity that is unfavourable for realtime use by autonomous underwater vehicles (AUVs), as a result of having been primarily designed for offline color correction. Here, we present DeepSeeColor, a novel algorithm that combines a state-of-the-art underwater image formation model with the computational efficiency of deep learning frameworks. In our experiments, we show that DeepSeeColor offers comparable performance to the popular "Sea-Thru" algorithm (Akkaynak & Treibitz, 2019) while being able to rapidly process images at up to 60Hz, thus making it suitable for use onboard AUVs as a preprocessing step to enable more robust vision-based behaviours.

01 Feb 2024
Coral reefs are fast-changing and complex ecosystems that are crucial to
monitor and study. Biological hotspot detection can help coral reef managers
prioritize limited resources for monitoring and intervention tasks. Here, we
explore the use of autonomous underwater vehicles (AUVs) with cameras, coupled
with visual detectors and photogrammetry, to map and identify these hotspots.
This approach can provide high spatial resolution information in fast feedback
cycles. To the best of our knowledge, we present one of the first attempts at
using an AUV to gather visually-observed, fine-grain biological hotspot maps in
concert with topography of a coral reefs. Our hotspot maps correlate with
rugosity, an established proxy metric for coral reef biodiversity and
abundance, as well as with our visual inspections of the 3D reconstruction. We
also investigate issues of scaling this approach when applied to new reefs by
using these visual detectors pre-trained on large public datasets.
14 Feb 2023
In-situ visual observations of marine organisms is crucial to developing
behavioural understandings and their relations to their surrounding ecosystem.
Typically, these observations are collected via divers, tags, and
remotely-operated or human-piloted vehicles. Recently, however, autonomous
underwater vehicles equipped with cameras and embedded computers with GPU
capabilities are being developed for a variety of applications, and in
particular, can be used to supplement these existing data collection mechanisms
where human operation or tags are more difficult. Existing approaches have
focused on using fully-supervised tracking methods, but labelled data for many
underwater species are severely lacking. Semi-supervised trackers may offer
alternative tracking solutions because they require less data than
fully-supervised counterparts. However, because there are not existing
realistic underwater tracking datasets, the performance of semi-supervised
tracking algorithms in the marine domain is not well understood. To better
evaluate their performance and utility, in this paper we provide (1) a novel
dataset specific to marine animals located at this http URL, (2)
an evaluation of state-of-the-art semi-supervised algorithms in the context of
underwater animal tracking, and (3) an evaluation of real-world performance
through demonstrations using a semi-supervised algorithm on-board an autonomous
underwater vehicle to track marine animals in the wild.

19 Aug 2025

The search for Life in the Universe generally assumes three basic life's needs: I) building block elements (i.e., CHNOPS), II) a solvent to life's reactions (generally, liquid water) and III) a thermodynamic disequilibrium. It is assumed that similar requirements might be universal in the Cosmos. On our planet, life is able to harvest energy from a wide array of thermodynamic disequilibria, generally in the form of redox disequilibrium. The amount of different redox couples used by living systems has been estimated to be in the range of several thousands of reactions. Each of these energy yielding reactions requires specialised proteins called oxidoreductases, that have one or more metal cofactors acting as catalytic centres to exchange electrons. These metals are de facto the key component of the engines that life uses to tap into the thermodynamic disequilibria needed to fuel metabolism. The availability of these transition metals is not uniform in the Universe, and it is a function of the distribution (in time and space) of complex dynamics. Despite this, Life's need for specific metals to access thermodynamic disequilibria has been so far completely overlooked in identifying astrobiological targets. We argue that the availability of at least some transition elements appears to be an essential feature of habitability, and should be considered a primary requisite in selecting exoplanetary targets in the search for life.
25 Feb 2022
Monami is the synchronous waving of a submerged seagrass bed in response to unidirectional fluid flow. Here we develop a multiphase model for the dynamical instabilities and flow-driven collective motions of buoyant, deformable seagrass. We show that the impedance to flow due to the seagrass results in an unstable velocity shear layer at the canopy interface, leading to a periodic array of vortices that propagate downstream. Each passing vortex locally weakens the along-stream velocity at the canopy top, reducing the drag and allowing the deformed grass to straighten up just beneath it. This causes the grass to oscillate periodically. Crucially, the maximal grass deflection is out of phase with the vortices. A phase diagram for the onset of instability shows its dependence on the fluid Reynolds number and an effective buoyancy parameter. Less buoyant grass is more easily deformed by the flow and forms a weaker shear layer, with smaller vortices and less material exchange across the canopy top. While higher Reynolds number leads to stronger vortices and larger waving amplitudes of the seagrass, waving is maximized at intermediate grass buoyancy. All together, our theory and computations correct some misconceptions in interpretation of the mechanism and provide a robust explanation consistent with a number of experimental observations.
03 Apr 2023
This paper presents a novel visual feature based scene mapping method for
underwater vehicle manipulator systems (UVMSs), with specific emphasis on
robust mapping in natural seafloor environments. Our method uses GPU
accelerated SIFT features in a graph optimization framework to build a feature
map. The map scale is constrained by features from a vehicle mounted stereo
camera, and we exploit the dynamic positioning capability of the manipulator
system by fusing features from a wrist mounted fisheye camera into the map to
extend it beyond the limited viewpoint of the vehicle mounted cameras. Our
hybrid SLAM method is evaluated on challenging image sequences collected with a
UVMS in natural deep seafloor environments of the Costa Rican continental shelf
margin, and we also evaluate the stereo only mode on a shallow reef survey
dataset. Results on these datasets demonstrate the high accuracy of our system
and suitability for operating in diverse and natural seafloor environments. We
also contribute these datasets for public use.
30 Oct 2021
The Biogeochemical-Argo (BGC-Argo) program is building a network of globally distributed, sensor-equipped robotic profiling floats, improving our understanding of the climate system and how it is changing. These floats, however, are limited in the number of variables measured. In this study, we train neural networks to predict silicate and phosphate values in the Southern Ocean from temperature, pressure, salinity, oxygen, nitrate, and location and apply these models to earth system model (ESM) and BGC-Argo data to expand the utility of this ocean observation network. We trained our neural networks on observations from the Global Ocean Ship-Based Hydrographic Investigations Program (GO-SHIP) and use dropout regularization to provide uncertainty bounds around our predicted values. Our neural network significantly improves upon linear regression but shows variable levels of uncertainty across the ranges of predicted variables. We explore the generalization of our estimators to test data outside our training distribution from both ESM and BGC-Argo data. Our use of out-of-distribution test data to examine shifts in biogeochemical parameters and calculate uncertainty bounds around estimates advance the state-of-the-art in oceanographic data and climate monitoring. We make our data and code publicly available.
12 Oct 2025
A new AUV mission planning and execution software has been tested on AUV Sentry. Dubbed DINOS-R, it draws inspiration from cognitive architectures and AUV control systems to replace the legacy MC architecture. Unlike these existing architectures, however, DINOS-R is built from the ground-up to unify symbolic decision making (for understandable, repeatable, provable behavior) with machine learning techniques and reactive behaviors, for field-readiness across oceanographic platforms. Implemented primarily in Python3, DINOS-R is extensible, modular, and reusable, with an emphasis on non-expert use as well as growth for future research in oceanography and robot algorithms. Mission specification is flexible, and can be specified declaratively. Behavior specification is similarly flexible, supporting simultaneous use of real-time task planning and hard-coded user specified plans. These features were demonstrated in the field on Sentry, in addition to a variety of simulated cases. These results are discussed, and future work is outlined.
12 Dec 2017
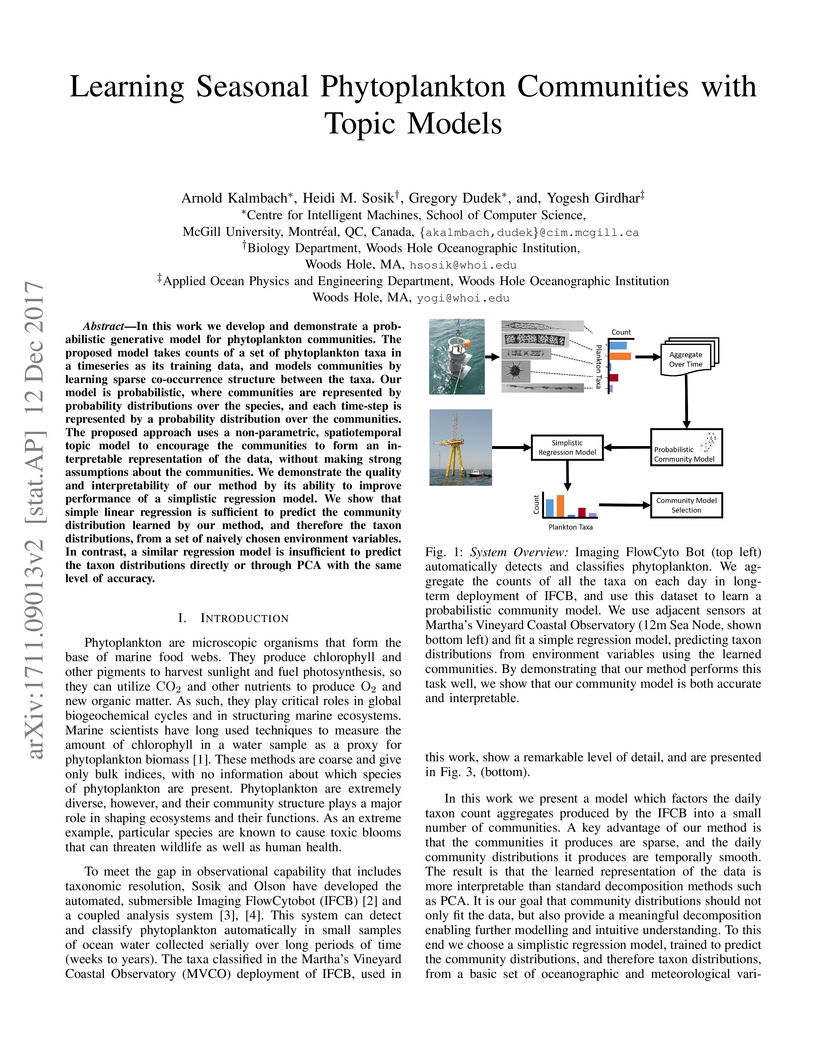
In this work we develop and demonstrate a probabilistic generative model for
phytoplankton communities. The proposed model takes counts of a set of
phytoplankton taxa in a timeseries as its training data, and models communities
by learning sparse co-occurrence structure between the taxa. Our model is
probabilistic, where communities are represented by probability distributions
over the species, and each time-step is represented by a probability
distribution over the communities. The proposed approach uses a non-parametric,
spatiotemporal topic model to encourage the communities to form an
interpretable representation of the data, without making strong assumptions
about the communities. We demonstrate the quality and interpretability of our
method by its ability to improve performance of a simplistic regression model.
We show that simple linear regression is sufficient to predict the community
distribution learned by our method, and therefore the taxon distributions, from
a set of naively chosen environment variables. In contrast, a similar
regression model is insufficient to predict the taxon distributions directly or
through PCA with the same level of accuracy.

30 Apr 2020

State-switching models such as hidden Markov models or Markov-switching
regression models are routinely applied to analyse sequences of observations
that are driven by underlying non-observable states. Coupled state-switching
models extend these approaches to address the case of multiple observation
sequences whose underlying state variables interact. In this paper, we provide
an overview of the modelling techniques related to coupling in state-switching
models, thereby forming a rich and flexible statistical framework particularly
useful for modelling correlated time series. Simulation experiments demonstrate
the relevance of being able to account for an asynchronous evolution as well as
interactions between the underlying latent processes. The models are further
illustrated using two case studies related to a) interactions between a dolphin
mother and her calf as inferred from movement data; and b) electronic health
record data collected on 696 patients within an intensive care unit.
05 Jan 2024


The conventional observables to identify a habitable or inhabited environment
in exoplanets, such as an ocean glint or abundant atmospheric O, will be
challenging to detect with present or upcoming observatories. Here we suggest a
new signature. A low carbon abundance in the atmosphere of a temperate rocky
planet, relative to other planets of the same system, traces the presence of
substantial amount of liquid water, plate tectonic and/or biomass. We show that
JWST can already perform such a search in some selected systems like TRAPPIST-1
via the CO band at , which falls in a spectral sweet spot
where the overall noise budget and the effect of cloud/hazes are optimal. We
propose a 3-step strategy for transiting exoplanets: 1) detection of an
atmosphere around temperate terrestrial planets in transits for the
most favorable systems, (2) assessment of atmospheric carbon depletion in $\sim
40_3$ abundance to disentangle between a
water- vs biomass-supported carbon depletion in transits. The concept
of carbon depletion as a signature for habitability is also applicable for
next-generation direct imaging telescopes.

26 Mar 2020
Researchers introduce the Gaussian-Dirichlet Random Field (GDRF) model for predicting high-dimensional categorical observations across space and time. This model combines Gaussian Processes with Dirichlet distributions, allowing autonomous robots to generate probability distributions over categories at unobserved locations for improved informative path planning.
There are no more papers matching your filters at the moment.
