
15 Oct 2025
Researchers at the Technical University of Darmstadt developed the Force-Aware Robotic Manipulation (FARM) framework, which integrates high-dimensional tactile force distributions into a diffusion policy's action space to enable explicit force control in robotic manipulation. This system achieved a 100% success rate on dynamic screw-tightening tasks and superior performance in grape picking and plant insertion compared to baselines.
14 Aug 2025
Motion Planning Diffusion (MPD) integrates conditional diffusion models with B-spline trajectory parametrization and a cost-guided planning-as-inference framework to learn and adapt robot motion plans. This approach generates diverse, smooth, and collision-free trajectories, achieving a 96% success rate in complex environments and successfully adapting learned human demonstrations to avoid novel obstacles.
20 Nov 2025
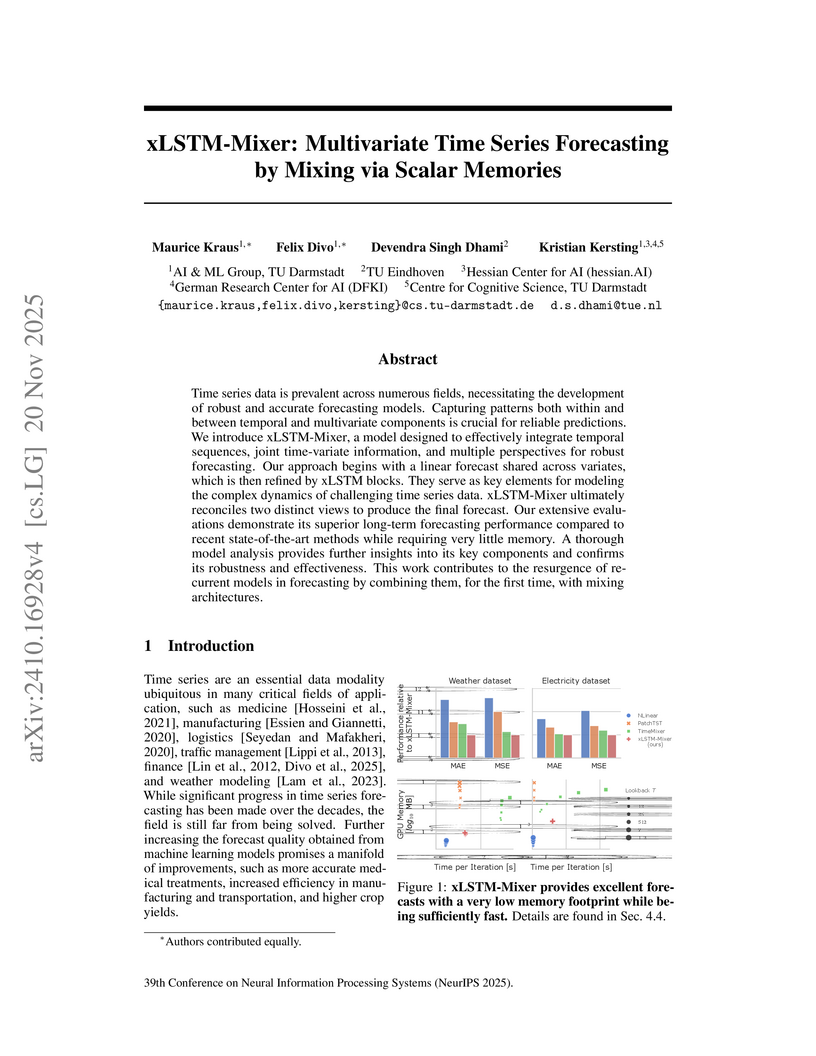
Time series data is prevalent across numerous fields, necessitating the development of robust and accurate forecasting models. Capturing patterns both within and between temporal and multivariate components is crucial for reliable predictions. We introduce xLSTM-Mixer, a model designed to effectively integrate temporal sequences, joint time-variate information, and multiple perspectives for robust forecasting. Our approach begins with a linear forecast shared across variates, which is then refined by xLSTM blocks. They serve as key elements for modeling the complex dynamics of challenging time series data. xLSTM-Mixer ultimately reconciles two distinct views to produce the final forecast. Our extensive evaluations demonstrate its superior long-term forecasting performance compared to recent state-of-the-art methods while requiring very little memory. A thorough model analysis provides further insights into its key components and confirms its robustness and effectiveness. This work contributes to the resurgence of recurrent models in forecasting by combining them, for the first time, with mixing architectures.

29 Aug 2025


Researchers from UCSD, Hillbot Inc., Cornell, and TU Darmstadt empirically investigated embodiment scaling laws in robot locomotion, showing that training on diverse robot morphologies improves generalization to unseen robots. Their method, using ~1,000 procedurally generated robots and a unified policy, enabled zero-shot sim-to-real transfer to real-world quadruped and humanoid robots, including adaptation to novel kinematic constraints.

15 Sep 2025
Actor-critic algorithms for deep multi-agent reinforcement learning (MARL) typically employ a policy update that responds to the current strategies of other agents. While being straightforward, this approach does not account for the updates of other agents at the same update step, resulting in miscoordination. In this paper, we introduce the -Level Policy Gradient (KPG), a method that recursively updates each agent against the updated policies of other agents, speeding up the discovery of effective coordinated policies. We theoretically prove that KPG with finite iterates achieves monotonic convergence to a local Nash equilibrium under certain conditions. We provide principled implementations of KPG by applying it to the deep MARL algorithms MAPPO, MADDPG, and FACMAC. Empirically, we demonstrate superior performance over existing deep MARL algorithms in StarCraft II and multi-agent MuJoCo.
01 Oct 2025
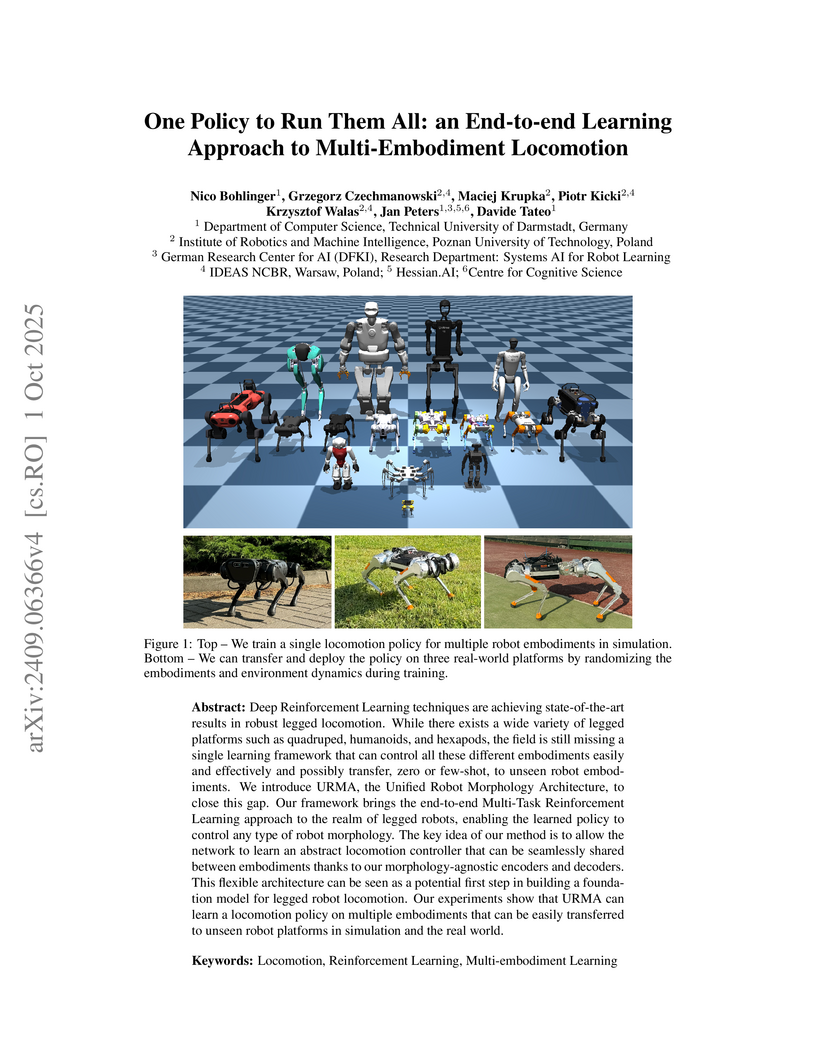
Researchers at TU Darmstadt and Poznan University of Technology developed URMA, an end-to-end learning framework that uses a single policy to control diverse legged robot morphologies, including quadrupeds, bipeds, and humanoids. The system achieved zero-shot transfer to unseen real-world robots, enabling robust locomotion on varied terrains.
08 Mar 2025
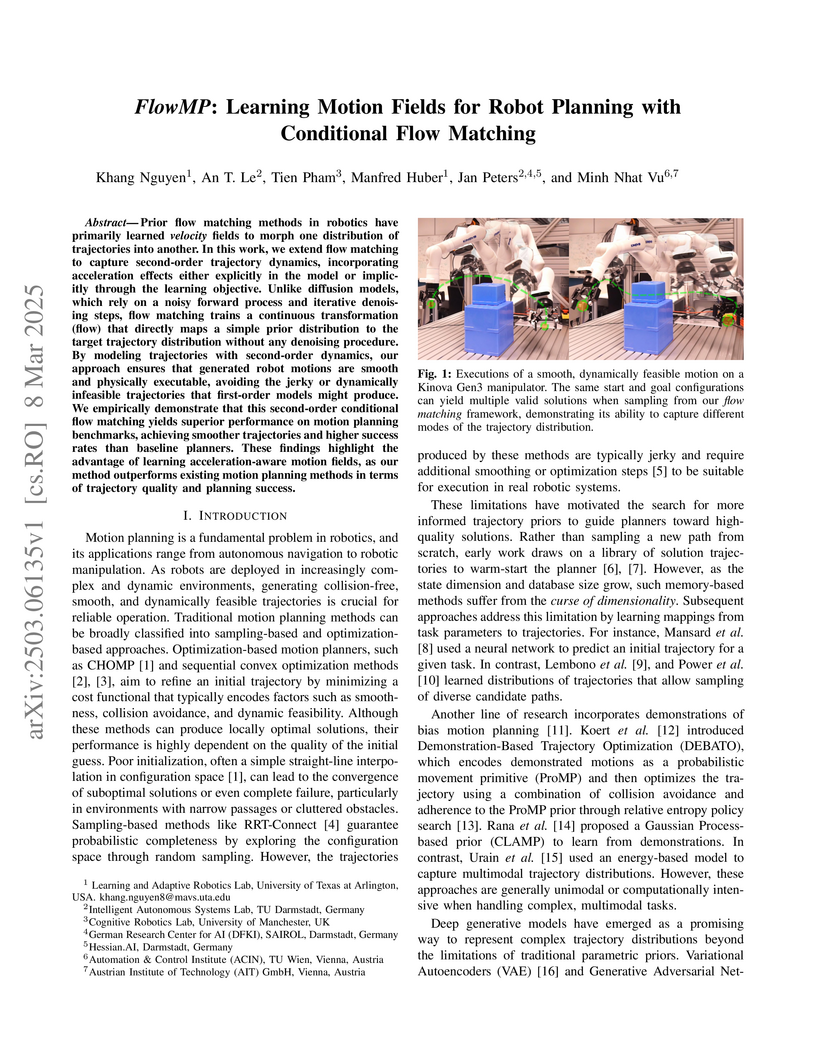
FlowMP presents a conditional flow matching framework for robot motion planning, learning a direct mapping from a noise distribution to expert trajectories. This method explicitly models second-order dynamics, generating kinodynamically feasible paths up to 100 times faster than prior approaches while demonstrating superior scalability and smoothness for complex 3D robotic tasks compared to diffusion models.

05 May 2024
Multi-Task Reinforcement Learning (MTRL) tackles the long-standing problem of
endowing agents with skills that generalize across a variety of problems. To
this end, sharing representations plays a fundamental role in capturing both
unique and common characteristics of the tasks. Tasks may exhibit similarities
in terms of skills, objects, or physical properties while leveraging their
representations eases the achievement of a universal policy. Nevertheless, the
pursuit of learning a shared set of diverse representations is still an open
challenge. In this paper, we introduce a novel approach for representation
learning in MTRL that encapsulates common structures among the tasks using
orthogonal representations to promote diversity. Our method, named Mixture Of
Orthogonal Experts (MOORE), leverages a Gram-Schmidt process to shape a shared
subspace of representations generated by a mixture of experts. When
task-specific information is provided, MOORE generates relevant representations
from this shared subspace. We assess the effectiveness of our approach on two
MTRL benchmarks, namely MiniGrid and MetaWorld, showing that MOORE surpasses
related baselines and establishes a new state-of-the-art result on MetaWorld.

02 Oct 2025
Researchers from Technical University of Darmstadt, Hessian.AI, DFKI, University of Würzburg, and RIG introduced MINTO, an update rule for deep reinforcement learning that intelligently combines estimates from online and target networks. It achieves faster and more stable learning by selectively leveraging the latest online estimates while mitigating overestimation, leading to performance improvements of up to 125% in offline settings.

06 Sep 2024

Spatial understanding is a critical aspect of most robotic tasks, particularly when generalization is important. Despite the impressive results of deep generative models in complex manipulation tasks, the absence of a representation that encodes intricate spatial relationships between observations and actions often limits spatial generalization, necessitating large amounts of demonstrations. To tackle this problem, we introduce a novel policy class, ActionFlow. ActionFlow integrates spatial symmetry inductive biases while generating expressive action sequences. On the representation level, ActionFlow introduces an SE(3) Invariant Transformer architecture, which enables informed spatial reasoning based on the relative SE(3) poses between observations and actions. For action generation, ActionFlow leverages Flow Matching, a state-of-the-art deep generative model known for generating high-quality samples with fast inference - an essential property for feedback control. In combination, ActionFlow policies exhibit strong spatial and locality biases and SE(3)-equivariant action generation. Our experiments demonstrate the effectiveness of ActionFlow and its two main components on several simulated and real-world robotic manipulation tasks and confirm that we can obtain equivariant, accurate, and efficient policies with spatially symmetric flow matching. Project website: this https URL
07 Mar 2025
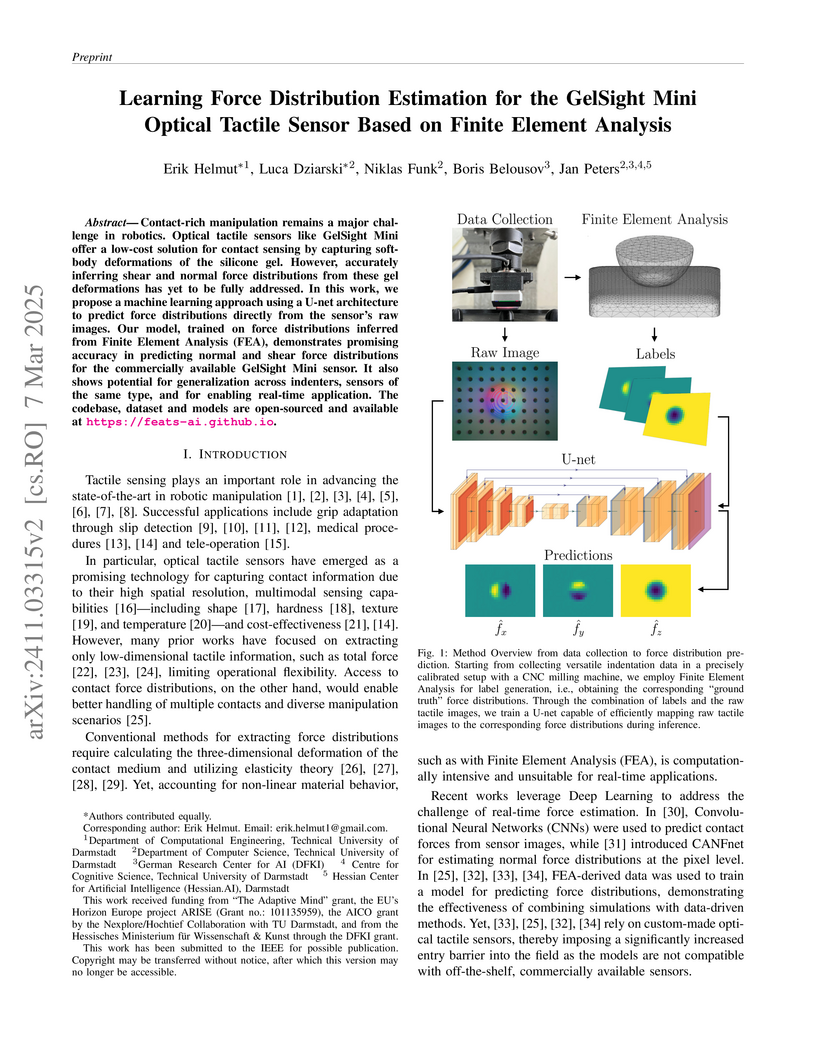
Contact-rich manipulation remains a major challenge in robotics. Optical
tactile sensors like GelSight Mini offer a low-cost solution for contact
sensing by capturing soft-body deformations of the silicone gel. However,
accurately inferring shear and normal force distributions from these gel
deformations has yet to be fully addressed. In this work, we propose a machine
learning approach using a U-net architecture to predict force distributions
directly from the sensor's raw images. Our model, trained on force
distributions inferred from Finite Element Analysis (FEA), demonstrates
promising accuracy in predicting normal and shear force distributions for the
commercially available GelSight Mini sensor. It also shows potential for
generalization across indenters, sensors of the same type, and for enabling
real-time application. The codebase, dataset and models are open-sourced and
available at this https URL .

26 Mar 2024
Researchers at Technische Universität Darmstadt and Politecnico di Torino introduce DOmain RAndomization via Entropy MaximizatiON (DORAEMON), an automated method for robust zero-shot sim-to-real transfer in reinforcement learning. It maximizes the diversity (entropy) of simulated dynamics while ensuring a high policy success rate, achieving a 60% zero-shot success rate on a complex robotic manipulation task, outperforming existing automated domain randomization techniques.

09 Aug 2025
Large language models (LLMs) exhibit strong multilingual abilities, yet the neural mechanisms behind language-specific processing remain unclear. We analyze language-specific neurons in Llama-3.1-8B, Mistral-Nemo-12B, and Aya-Expanse-8B & 32B across 21 typologically diverse languages, identifying neurons that control language behavior. Using the Language Activation Probability Entropy (LAPE) method, we show that these neurons cluster in deeper layers, with non-Latin scripts showing greater specialization. Related languages share overlapping neurons, reflecting internal representations of linguistic proximity.
Through language arithmetics, i.e. systematic activation addition and multiplication, we steer models to deactivate unwanted languages and activate desired ones, outperforming simpler replacement approaches. These interventions effectively guide behavior across five multilingual tasks: language forcing, translation, QA, comprehension, and NLI. Manipulation is more successful for high-resource languages, while typological similarity improves effectiveness. We also demonstrate that cross-lingual neuron steering enhances downstream performance and reveal internal "fallback" mechanisms for language selection when neurons are progressively deactivated. Our code is made publicly available at this https URL.
12 Jun 2025
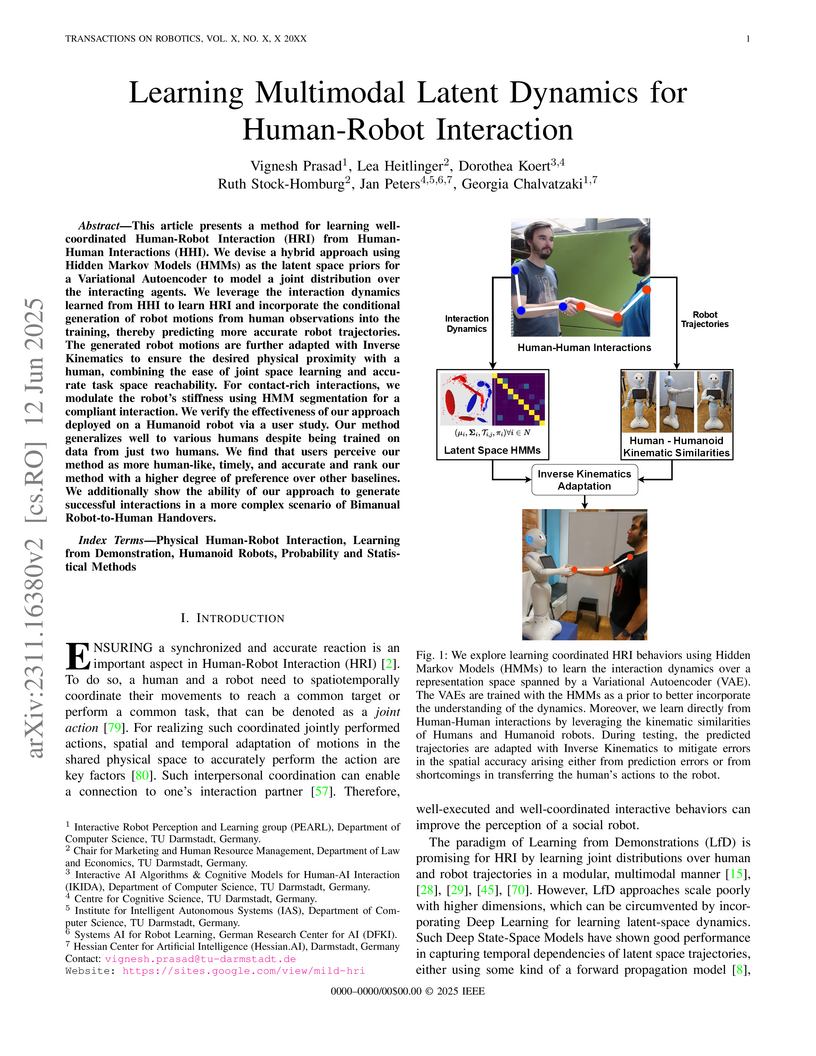
This article presents a method for learning well-coordinated Human-Robot Interaction (HRI) from Human-Human Interactions (HHI). We devise a hybrid approach using Hidden Markov Models (HMMs) as the latent space priors for a Variational Autoencoder to model a joint distribution over the interacting agents. We leverage the interaction dynamics learned from HHI to learn HRI and incorporate the conditional generation of robot motions from human observations into the training, thereby predicting more accurate robot trajectories. The generated robot motions are further adapted with Inverse Kinematics to ensure the desired physical proximity with a human, combining the ease of joint space learning and accurate task space reachability. For contact-rich interactions, we modulate the robot's stiffness using HMM segmentation for a compliant interaction. We verify the effectiveness of our approach deployed on a Humanoid robot via a user study. Our method generalizes well to various humans despite being trained on data from just two humans. We find that users perceive our method as more human-like, timely, and accurate and rank our method with a higher degree of preference over other baselines. We additionally show the ability of our approach to generate successful interactions in a more complex scenario of Bimanual Robot-to-Human Handovers.
17 Apr 2025
Most work on causality in machine learning assumes that causal relationships
are driven by a constant underlying process. However, the flexibility of
agents' actions or tipping points in the environmental process can change the
qualitative dynamics of the system. As a result, new causal relationships may
emerge, while existing ones change or disappear, resulting in an altered causal
graph. To analyze these qualitative changes on the causal graph, we propose the
concept of meta-causal states, which groups classical causal models into
clusters based on equivalent qualitative behavior and consolidates specific
mechanism parameterizations. We demonstrate how meta-causal states can be
inferred from observed agent behavior, and discuss potential methods for
disentangling these states from unlabeled data. Finally, we direct our analysis
towards the application of a dynamical system, showing that meta-causal states
can also emerge from inherent system dynamics, and thus constitute more than a
context-dependent framework in which mechanisms emerge only as a result of
external factors.

18 Feb 2025
Optimal decision-making under partial observability requires reasoning about
the uncertainty of the environment's hidden state. However, most reinforcement
learning architectures handle partial observability with sequence models that
have no internal mechanism to incorporate uncertainty in their hidden state
representation, such as recurrent neural networks, deterministic state-space
models and transformers. Inspired by advances in probabilistic world models for
reinforcement learning, we propose a standalone Kalman filter layer that
performs closed-form Gaussian inference in linear state-space models and train
it end-to-end within a model-free architecture to maximize returns. Similar to
efficient linear recurrent layers, the Kalman filter layer processes sequential
data using a parallel scan, which scales logarithmically with the sequence
length. By design, Kalman filter layers are a drop-in replacement for other
recurrent layers in standard model-free architectures, but importantly they
include an explicit mechanism for probabilistic filtering of the latent state
representation. Experiments in a wide variety of tasks with partial
observability show that Kalman filter layers excel in problems where
uncertainty reasoning is key for decision-making, outperforming other stateful
models.

12 Jun 2025
Accurate in-hand pose estimation is crucial for robotic object manipulation,
but visual occlusion remains a major challenge for vision-based approaches.
This paper presents an approach to robotic in-hand object pose estimation,
combining visual and tactile information to accurately determine the position
and orientation of objects grasped by a robotic hand. We address the challenge
of visual occlusion by fusing visual information from a wrist-mounted RGB-D
camera with tactile information from vision-based tactile sensors mounted on
the fingertips of a robotic gripper. Our approach employs a weighting and
sensor fusion module to combine point clouds from heterogeneous sensor types
and control each modality's contribution to the pose estimation process. We use
an augmented Iterative Closest Point (ICP) algorithm adapted for weighted point
clouds to estimate the 6D object pose. Our experiments show that incorporating
tactile information significantly improves pose estimation accuracy,
particularly when occlusion is high. Our method achieves an average pose
estimation error of 7.5 mm and 16.7 degrees, outperforming vision-only
baselines by up to 20%. We also demonstrate the ability of our method to
perform precise object manipulation in a real-world insertion task.

11 Dec 2024
Grasping objects successfully from a single-view camera is crucial in many robot manipulation tasks. An approach to solve this problem is to leverage simulation to create large datasets of pairs of objects and grasp poses, and then learn a conditional generative model that can be prompted quickly during deployment. However, the grasp pose data is highly multimodal since there are several ways to grasp an object. Hence, in this work, we learn a grasp generative model with diffusion models to sample candidate grasp poses given a partial point cloud of an object. A novel aspect of our method is to consider diffusion in the manifold space of rotations and to propose a collision-avoidance cost guidance to improve the grasp success rate during inference. To accelerate grasp sampling we use recent techniques from the diffusion literature to achieve faster inference times. We show in simulation and real-world experiments that our approach can grasp several objects from raw depth images with success rate and benchmark it against several baselines.

02 Aug 2025
Sampling-based model predictive control (MPC) offers strong performance in nonlinear and contact-rich robotic tasks, yet often suffers from poor exploration due to locally greedy sampling schemes. We propose \emph{Model Tensor Planning} (MTP), a novel sampling-based MPC framework that introduces high-entropy control trajectory generation through structured tensor sampling. By sampling over randomized multipartite graphs and interpolating control trajectories with B-splines and Akima splines, MTP ensures smooth and globally diverse control candidates. We further propose a simple -mixing strategy that blends local exploitative and global exploratory samples within the modified Cross-Entropy Method (CEM) update, balancing control refinement and exploration. Theoretically, we show that MTP achieves asymptotic path coverage and maximum entropy in the control trajectory space in the limit of infinite tensor depth and width.
Our implementation is fully vectorized using JAX and compatible with MuJoCo XLA, supporting \emph{Just-in-time} (JIT) compilation and batched rollouts for real-time control with online domain randomization. Through experiments on various challenging robotic tasks, ranging from dexterous in-hand manipulation to humanoid locomotion, we demonstrate that MTP outperforms standard MPC and evolutionary strategy baselines in task success and control robustness. Design and sensitivity ablations confirm the effectiveness of MTP tensor sampling structure, spline interpolation choices, and mixing strategy. Altogether, MTP offers a scalable framework for robust exploration in model-based planning and control.
29 May 2025
Batch planning is increasingly necessary to quickly produce diverse and
quality motion plans for downstream learning applications, such as distillation
and imitation learning. This paper presents Global Tensor Motion Planning
(GTMP) -- a sampling-based motion planning algorithm comprising only tensor
operations. We introduce a novel discretization structure represented as a
random multipartite graph, enabling efficient vectorized sampling, collision
checking, and search. We provide a theoretical investigation showing that GTMP
exhibits probabilistic completeness while supporting modern GPU/TPU.
Additionally, by incorporating smooth structures into the multipartite graph,
GTMP directly plans smooth splines without requiring gradient-based
optimization. Experiments on lidar-scanned occupancy maps and the
MotionBenchMarker dataset demonstrate GTMP's computation efficiency in batch
planning compared to baselines, underscoring GTMP's potential as a robust,
scalable planner for diverse applications and large-scale robot learning tasks.
There are no more papers matching your filters at the moment.
