
02 Apr 2025

Traffic simulation is essential for autonomous vehicle (AV) development,
enabling comprehensive safety evaluation across diverse driving conditions.
However, traditional rule-based simulators struggle to capture complex human
interactions, while data-driven approaches often fail to maintain long-term
behavioral realism or generate diverse safety-critical events. To address these
challenges, we propose TeraSim, an open-source, high-fidelity traffic
simulation platform designed to uncover unknown unsafe events and efficiently
estimate AV statistical performance metrics, such as crash rates. TeraSim is
designed for seamless integration with third-party physics simulators and
standalone AV stacks, to construct a complete AV simulation system.
Experimental results demonstrate its effectiveness in generating diverse
safety-critical events involving both static and dynamic agents, identifying
hidden deficiencies in AV systems, and enabling statistical performance
evaluation. These findings highlight TeraSim's potential as a practical tool
for AV safety assessment, benefiting researchers, developers, and policymakers.
The code is available at this https URL
13 Sep 2025
Vision-Language Models (VLMs) have demonstrated significant potential for end-to-end autonomous driving. However, the field still lacks a practical platform that enables dynamic model updates, rapid validation, fair comparison, and intuitive performance assessment. To that end, we introduce LightEMMA, a Lightweight End-to-End Multimodal Model for Autonomous driving. LightEMMA provides a unified, VLM-based autonomous driving framework without ad hoc customizations, enabling easy integration with evolving state-of-the-art commercial and open-source models. We construct twelve autonomous driving agents using various VLMs and evaluate their performance on the challenging nuScenes prediction task, comprehensively assessing computational metrics and providing critical insights. Illustrative examples show that, although VLMs exhibit strong scenario interpretation capabilities, their practical performance in autonomous driving tasks remains a concern. Additionally, increased model complexity and extended reasoning do not necessarily lead to better performance, emphasizing the need for further improvements and task-specific designs. The code is available at this https URL.

14 Oct 2025
Researchers at the University of Michigan-Dearborn and UMTRI developed an automated, interpretable framework using a fine-tuned Llama 3.2 1B model to predict Driver Hazardous Actions (DHAs) from crash narratives and structured data. This approach achieved 80% accuracy in classifying DHAs and provided quantitative insights into how hypothetical scenarios like driver distraction and teen drivers probabilistically shift DHA classifications.

21 Sep 2025
F1Tenth is a widely adopted reduced-scale platform for developing and testing autonomous racing algorithms, hosting annual competitions worldwide. With high operating speeds, dynamic environments, and head-to-head interactions, autonomous racing requires algorithms that diverge from those in classical autonomous driving. Training such algorithms is particularly challenging: the need for rapid decision-making at high speeds severely limits model capacity. To address this, we propose End2Race, a novel end-to-end imitation learning algorithm designed for head-to-head autonomous racing. End2Race leverages a Gated Recurrent Unit (GRU) architecture to capture continuous temporal dependencies, enabling both short-term responsiveness and long-term strategic planning. We also adopt a sigmoid-based normalization function that transforms raw LiDAR scans into spatial pressure tokens, facilitating effective model training and convergence. The algorithm is extremely efficient, achieving an inference time of less than 0.5 milliseconds on a consumer-class GPU. Experiments in the F1Tenth simulator demonstrate that End2Race achieves a 94.2% safety rate across 2,400 overtaking scenarios, each with an 8-second time limit, and successfully completes overtakes in 59.2% of cases. This surpasses previous methods and establishes ours as a leading solution for the F1Tenth racing testbed. Code is available at this https URL.

06 May 2025
Generating safety-critical scenarios in high-fidelity simulations offers a
promising and cost-effective approach for efficient testing of autonomous
vehicles. Existing methods typically rely on manipulating a single vehicle's
trajectory through sophisticated designed objectives to induce adversarial
interactions, often at the cost of realism and scalability. In this work, we
propose the Risk-Adjustable Driving Environment (RADE), a simulation framework
that generates statistically realistic and risk-adjustable traffic scenes.
Built upon a multi-agent diffusion architecture, RADE jointly models the
behavior of all agents in the environment and conditions their trajectories on
a surrogate risk measure. Unlike traditional adversarial methods, RADE learns
risk-conditioned behaviors directly from data, preserving naturalistic
multi-agent interactions with controllable risk levels. To ensure physical
plausibility, we incorporate a tokenized dynamics check module that efficiently
filters generated trajectories using a motion vocabulary. We validate RADE on
the real-world rounD dataset, demonstrating that it preserves statistical
realism across varying risk levels and naturally increases the likelihood of
safety-critical events as the desired risk level grows up. Our results
highlight RADE's potential as a scalable and realistic tool for AV safety
evaluation.

11 Jul 2025
Domain adaptation for object detection (DAOD) has become essential to counter performance degradation caused by distribution shifts between training and deployment domains. However, a critical factor influencing DAOD - context bias resulting from learned foreground-background (FG-BG) associations - has remained underexplored. We address three key questions regarding FG BG associations in object detection: are FG-BG associations encoded during the training, is there a causal relationship between FG-BG associations and detection performance, and is there an effect of FG-BG association on DAOD. To examine how models capture FG BG associations, we analyze class-wise and feature-wise performance degradation using background masking and feature perturbation, measured via change in accuracies (defined as drop rate). To explore the causal role of FG-BG associations, we apply do-calculus on FG-BG pairs guided by class activation mapping (CAM). To quantify the causal influence of FG-BG associations across domains, we propose a novel metric - domain association gradient - defined as the ratio of drop rate to maximum mean discrepancy (MMD). Through systematic experiments involving background masking, feature-level perturbations, and CAM, we reveal that convolution-based object detection models encode FG-BG associations. Our results demonstrate that context bias not only exists but causally undermines the generalization capabilities of object detection models across domains. Furthermore, we validate these findings across multiple models and datasets, including state-of-the-art architectures such as ALDI++. This study highlights the necessity of addressing context bias explicitly in DAOD frameworks, providing insights that pave the way for developing more robust and generalizable object detection systems.

10 Aug 2025
While much research has recently focused on generating physics-based adversarial samples, a critical yet often overlooked category originates from physical failures within on-board cameras -- components essential to the perception systems of autonomous vehicles. Firstly, we motivate the study using two separate real-world experiments to showcase that indeed glass failures would cause the detection based neural network models to fail. Secondly, we develop a simulation-based study using the physical process of the glass breakage to create perturbed scenarios, representing a realistic class of physics-based adversarial samples. Using a finite element model (FEM)-based approach, we generate surface cracks on the camera image by applying a stress field defined by particles within a triangular mesh. Lastly, we use physically-based rendering (PBR) techniques to provide realistic visualizations of these physically plausible fractures. To analyze the safety implications, we superimpose these simulated broken glass effects as image filters on widely used open-source datasets: KITTI and BDD100K using two most prominent object detection neural networks (CNN-based -- YOLOv8 and Faster R-CNN) and Pyramid Vision Transformers. To further investigate the distributional impact of these visual distortions, we compute the Kullback-Leibler (K-L) divergence between three distinct data distributions, applying various broken glass filters to a custom dataset (captured through a cracked windshield), as well as the KITTI and Kaggle cats and dogs datasets. The K-L divergence analysis suggests that these broken glass filters do not introduce significant distributional shifts.

19 May 2025
Determining material properties from camera images can expand the ability to
identify complex objects in indoor environments, which is valuable for consumer
robotics applications. To support this, we introduce MatPredict, a dataset that
combines the high-quality synthetic objects from Replica dataset with MatSynth
dataset's material properties classes - to create objects with diverse material
properties. We select 3D meshes of specific foreground objects and render them
with different material properties. In total, we generate \textbf{18} commonly
occurring objects with \textbf{14} different materials. We showcase how we
provide variability in terms of lighting and camera placement for these
objects. Next, we provide a benchmark for inferring material properties from
visual images using these perturbed models in the scene, discussing the
specific neural network models involved and their performance based on
different image comparison metrics. By accurately simulating light interactions
with different materials, we can enhance realism, which is crucial for training
models effectively through large-scale simulations. This research aims to
revolutionize perception in consumer robotics. The dataset is provided
\href{this https URL}{here} and the code is
provided \href{this https URL}{here}.
01 Dec 2020
Current deep reinforcement learning (DRL) algorithms utilize randomness in simulation environments to assume complete coverage in the state space. However, particularly in high dimensions, relying on randomness may lead to gaps in coverage of the trained DRL neural network model, which in turn may lead to drastic and often fatal real-world situations. To the best of the author's knowledge, the assessment of coverage for DRL is lacking in current research literature. Therefore, in this paper, a novel measure, Approximate Pseudo-Coverage (APC), is proposed for assessing the coverage in DRL applications. We propose to calculate APC by projecting the high dimensional state space on to a lower dimensional manifold and quantifying the occupied space. Furthermore, we utilize an exploration-exploitation strategy for coverage maximization using Rapidly-Exploring Random Tree (RRT). The efficacy of the assessment and the acceleration of coverage is demonstrated on standard tasks such as Cartpole, highway-env.

14 Oct 2021
Traffic simulation is an efficient and cost-effective way to test Autonomous Vehicles (AVs) in a complex and dynamic environment. Numerous studies have been conducted for AV evaluation using traffic simulation over the past decades. However, the current simulation environments fall behind on two fronts -- the background vehicles (BVs) fail to simulate naturalistic driving behavior and the existing environments do not test the entire pipeline in a modular fashion. This study aims to propose a simulation framework that creates a complex and naturalistic traffic environment. Specifically, we combine a modified version of the Simulation of Urban MObility (SUMO) simulator with the Cars Learning to Act (CARLA) simulator to generate a simulation environment that could emulate the complexities of the external environment while providing realistic sensor outputs to the AV pipeline. In a past research work, we created an open-source Python package called SUMO-Gym which generates a realistic road network and naturalistic traffic through SUMO and combines that with OpenAI Gym to provide ease of use for the end user. We propose to extend our developed software by adding CARLA, which in turn will enrich the perception of the ego vehicle by providing realistic sensors outputs of the AVs surrounding environment. Using the proposed framework, AVs perception, planning, and control could be tested in a complex and realistic driving environment. The performance of the proposed framework in constructing output generation and AV evaluations are demonstrated using several case studies.

24 Aug 2023
We examine the problem of estimating footprint uncertainty of objects imaged using the infrastructure based camera sensing. A closed form relationship is established between the ground coordinates and the sources of the camera errors. Using the error propagation equation, the covariance of a given ground coordinate can be measured as a function of the camera errors. The uncertainty of the footprint of the bounding box can then be given as the function of all the extreme points of the object footprint. In order to calculate the uncertainty of a ground point, the typical error sizes of the error sources are required. We present a method of estimating the typical error sizes from an experiment using a static, high-precision LiDAR as the ground truth. Finally, we present a simulated case study of uncertainty quantification from infrastructure based camera in CARLA to provide a sense of how the uncertainty changes across a left turn maneuver.

24 Aug 2023
We examine the problem of estimating footprint uncertainty of objects imaged using the infrastructure based camera sensing. A closed form relationship is established between the ground coordinates and the sources of the camera errors. Using the error propagation equation, the covariance of a given ground coordinate can be measured as a function of the camera errors. The uncertainty of the footprint of the bounding box can then be given as the function of all the extreme points of the object footprint. In order to calculate the uncertainty of a ground point, the typical error sizes of the error sources are required. We present a method of estimating the typical error sizes from an experiment using a static, high-precision LiDAR as the ground truth. Finally, we present a simulated case study of uncertainty quantification from infrastructure based camera in CARLA to provide a sense of how the uncertainty changes across a left turn maneuver.
02 Feb 2020

This paper 1) analyzes the extent to which drivers engage in multitasking
additional-to-driving (MAD) under various conditions, 2) specifies odds ratios
(ORs) of crashing associated with MAD compared to no task engagement, and 3)
explores the structure of MAD, based on data from the Second Strategic Highway
Research Program Naturalistic Driving Study (SHRP2 NDS). Sensitivity analysis
in which secondary tasks were re-defined by grouping similar tasks was
performed to investigate the extent to which ORs are affected by the specific
task definitions in SHRP2. A novel visual representation of multitasking was
developed to show which secondary tasks co-occur frequently and which ones do
not. MAD occurs in 11% of control driving segments, 22% of crashes and
near-crashes (CNC), 26% of Level 1-3 crashes and 39% of rear-end striking
crashes, and 9%, 16%, 17% and 28% respectively for the same event types if MAD
is defined in terms of general task groups. The most common co-occurrences of
secondary tasks vary substantially among event types; for example, 'Passenger
in adjacent seat - interaction' and 'Other non-specific internal eye glance'
tend to co-occur in CNC but tend not to co-occur in control driving segments.
The odds ratios of MAD compared to driving without any secondary task and the
corresponding 95% confidence intervals are 2.38 (2.17-2.61) for CNC, 3.72
(3.11-4.45) for Level 1-3 crashes and 8.48 (5.11-14.07) for rear-end striking
crashes. The corresponding ORs using general task groups to define MAD are
slightly lower at 2.00 (1.80-2.21) for CNC, 3.03 (2.48-3.69) for Level 1-3
crashes and 6.94 (4.04-11.94) for rear-end striking crashes. The results
confirm that independently of whether secondary tasks are defined according to
SHRP2 or general task groups, the reduction of driving performance from MAD
observed in simulator studies is manifested in real-world crashes as well.

04 Feb 2017

Misunderstanding of driver correction behaviors (DCB) is the primary reason
for false warnings of lane-departure-prediction systems. We propose a
learning-based approach to predicting unintended lane-departure behaviors (LDB)
and the chance for drivers to bring the vehicle back to the lane. First, in
this approach, a personalized driver model for lane-departure and lane-keeping
behavior is established by combining the Gaussian mixture model and the hidden
Markov model. Second, based on this model, we develop an online model-based
prediction algorithm to predict the forthcoming vehicle trajectory and judge
whether the driver will demonstrate an LDB or a DCB. We also develop a warning
strategy based on the model-based prediction algorithm that allows the
lane-departure warning system to be acceptable for drivers according to the
predicted trajectory. In addition, the naturalistic driving data of 10 drivers
is collected through the University of Michigan Safety Pilot Model Deployment
program to train the personalized driver model and validate this approach. We
compare the proposed method with a basic time-to-lane-crossing (TLC) method and
a TLC-directional sequence of piecewise lateral slopes (TLC-DSPLS) method. The
results show that the proposed approach can reduce the false-warning rate to
3.07\%.
28 Mar 2017
Interactions between vehicles and pedestrians have always been a major
problem in traffic safety. Experienced human drivers are able to analyze the
environment and choose driving strategies that will help them avoid crashes.
What is not yet clear, however, is how automated vehicles will interact with
pedestrians. This paper proposes a new method for evaluating the safety and
feasibility of the driving strategy of automated vehicles when encountering
unsignalized crossings. MobilEye sensors installed on buses in Ann Arbor,
Michigan, collected data on 2,973 valid crossing events. A stochastic
interaction model was then created using a multivariate Gaussian mixture model.
This model allowed us to simulate the movements of pedestrians reacting to an
oncoming vehicle when approaching unsignalized crossings, and to evaluate the
passing strategies of automated vehicles. A simulation was then conducted to
demonstrate the evaluation procedure.
18 May 2023
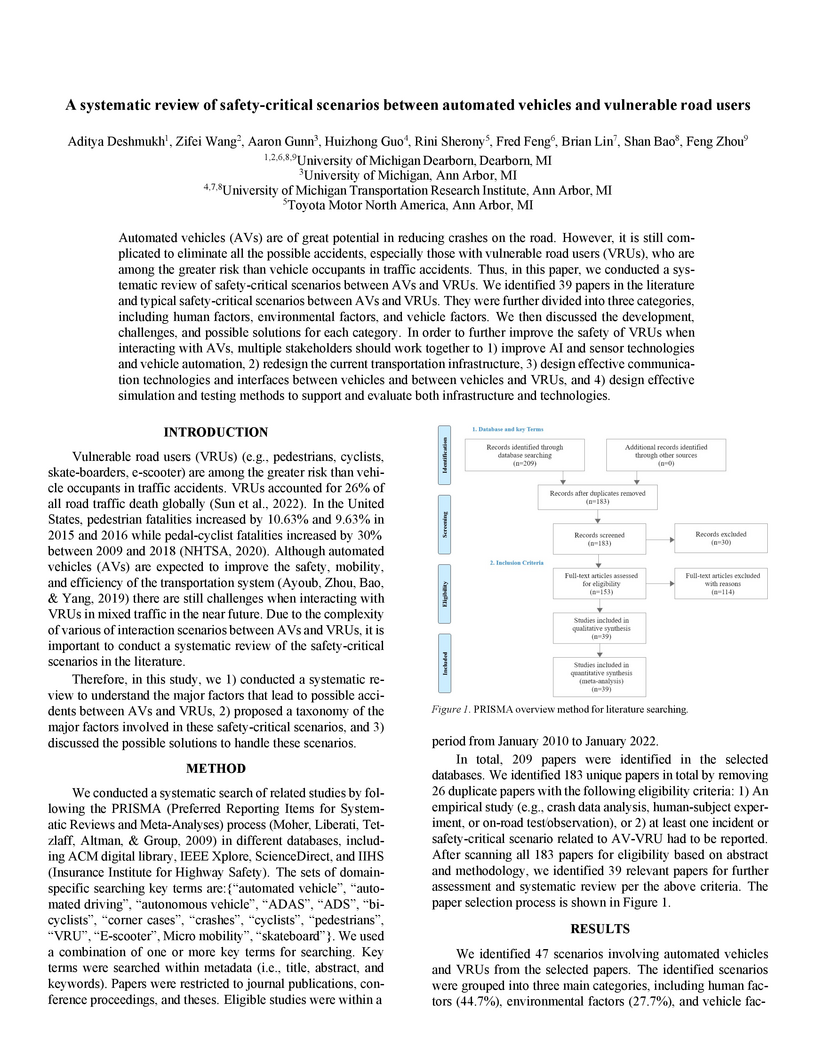
Automated vehicles (AVs) are of great potential in reducing crashes on the road. However, it is still complicated to eliminate all the possible accidents, especially those with vulnerable road users (VRUs), who are among the greater risk than vehicle occupants in traffic accidents. Thus, in this paper, we conducted a systematic review of safety-critical scenarios between AVs and VRUs. We identified 39 papers in the literature and typical safety-critical scenarios between AVs and VRUs. They were further divided into three categories, including human factors, environmental factors, and vehicle factors. We then discussed the development, challenges, and possible solutions for each category. In order to further improve the safety of VRUs when interacting with AVs, multiple stakeholders should work together to 1) improve AI and sensor technologies and vehicle automation, 2) redesign the current transportation infrastructure, 3) design effective communication technologies and interfaces between vehicles and between vehicles and VRUs, and 4) design effective simulation and testing methods to support and evaluate both infrastructure and technologies.

22 May 2025
Autonomous vehicles (AVs) have significantly advanced in real-world
deployment in recent years, yet safety continues to be a critical barrier to
widespread adoption. Traditional functional safety approaches, which primarily
verify the reliability, robustness, and adequacy of AV hardware and software
systems from a vehicle-centric perspective, do not sufficiently address the
AV's broader interactions and behavioral impact on the surrounding traffic
environment. To overcome this limitation, we propose a paradigm shift toward
behavioral safety, a comprehensive approach focused on evaluating AV responses
and interactions within the traffic environment. To systematically assess
behavioral safety, we introduce a third-party AV safety assessment framework
comprising two complementary evaluation components: the Driver Licensing Test
and the Driving Intelligence Test. The Driver Licensing Test evaluates the AV's
reactive behaviors under controlled scenarios, ensuring basic behavioral
competency. In contrast, the Driving Intelligence Test assesses the AV's
interactive behaviors within naturalistic traffic conditions, quantifying the
frequency of safety-critical events to deliver statistically meaningful safety
metrics before large-scale deployment. We validated our proposed framework
using Autoware.Universe, an open-source Level 4 AV, tested both in simulated
environments and on the physical test track at the University of Michigan's
Mcity Testing Facility. The results indicate that Autoware.Universe passed 6
out of 14 scenarios and exhibited a crash rate of 3.01e-3 crashes per mile,
approximately 1,000 times higher than the average human driver crash rate.
During the tests, we also uncovered several unknown unsafe scenarios for
Autoware.Universe. These findings underscore the necessity of behavioral safety
evaluations for improving AV safety performance prior to widespread public
deployment.
21 Feb 2020
Testing scenario library generation (TSLG) is a critical step for the development and deployment of connected and automated vehicles (CAVs). In Part I of this study, a general methodology for TSLG is proposed, and theoretical properties are investigated regarding the accuracy and efficiency of CAV evaluation. This paper aims to provide implementation examples and guidelines, and to enhance the proposed methodology under high-dimensional scenarios. Three typical cases, including cut-in, highway-exit, and car-following, are designed and studied in this paper. For each case, the process of library generation and CAV evaluation is elaborated. To address the challenges brought by high dimensions, the proposed methodology is further enhanced by reinforcement learning technique. For all three cases, results show that the proposed methods can accelerate the CAV evaluation process by multiple magnitudes with same evaluation accuracy, if compared with the on-road test method.

04 Jul 2024
Data subsampling has become widely recognized as a tool to overcome computational and economic bottlenecks in analyzing massive datasets. We contribute to the development of adaptive design for estimation of finite population characteristics, using active learning and adaptive importance sampling. We propose an active sampling strategy that iterates between estimation and data collection with optimal subsamples, guided by machine learning predictions on yet unseen data. The method is illustrated on virtual simulation-based safety assessment of advanced driver assistance systems. Substantial performance improvements are demonstrated compared to traditional sampling methods.

29 Sep 2025
This study investigates how targeted training interventions can improve safe driver interaction with vehicle automation (VA) systems, focusing on Adaptive Cruise Control (ACC) and Lane Keeping Assist (LKA), both safety-critical advanced driver assistance systems (ADAS). Effective training reduces misuse and enhances road safety by promoting correct knowledge and application.
A review of multiple automakers' owners' manuals revealed inconsistencies in describing ACC and LKA functions. Three training formats were compared: (1) owners' manual (OM), (2) knowledge-based (KB) with summarized operational guidelines and visual aids, and (3) skill-based hands-on practice in a driving simulator (SIM). Thirty-six participants with no prior VA experience were randomly assigned to one group. Safety-relevant outcomes - system comprehension (quiz scores) and real-world engagement (frequency and duration of activations) - were analyzed using mixed-effects and negative binomial models.
KB training produced the greatest improvements in comprehension of system limitations, as well as safer engagement patterns. Compared with OM participants, KB participants achieved significantly higher quiz scores and engaged LKA and ACC more often (1.4 and 1.45 times, respectively); they also demonstrated greater awareness of scenarios requiring manual control, indicating reduced risk of inappropriate reliance. Older drivers exhibited longer activations overall, highlighting age-related differences in reliance and potential safety implications.
Short, targeted training can significantly improve safe and effective VA system use, particularly for senior drivers. These results highlight training as a proactive safety intervention to reduce human-automation mismatch and enhance system reliability in real-world driving.
There are no more papers matching your filters at the moment.
