
19 Sep 2025
The design of the humanoid ankle is critical for safe and efficient ground interaction. Key factors such as mechanical compliance and motor mass distribution have driven the adoption of parallel mechanism architectures. However, selecting the optimal configuration depends on both actuator availability and task requirements. We propose a unified methodology for the design and evaluation of parallel ankle mechanisms. A multi-objective optimization synthesizes the mechanism geometry, the resulting solutions are evaluated using a scalar cost function that aggregates key performance metrics for cross-architecture comparison. We focus on two representative architectures: the Spherical-Prismatic-Universal (SPU) and the Revolute-Spherical-Universal (RSU). For both, we resolve the kinematics, and for the RSU, introduce a parameterization that ensures workspace feasibility and accelerates optimization. We validate our approach by redesigning the ankle of an existing humanoid robot. The optimized RSU consistently outperforms both the original serial design and a conventionally engineered RSU, reducing the cost function by up to 41% and 14%, respectively.

11 Oct 2025
Robot person following (RPF) -- mobile robots that follow and assist a specific person -- has emerging applications in personal assistance, security patrols, eldercare, and logistics. To be effective, such robots must follow the target while ensuring safety and comfort for both the target and surrounding people. In this work, we present the first comprehensive study of RPF, which (i) surveys representative scenarios, motion-planning methods, and evaluation metrics with a focus on safety and comfort; (ii) introduces Follow-Bench, a unified benchmark simulating diverse scenarios, including various target trajectory patterns, crowd dynamics, and environmental layouts; and (iii) re-implements six representative RPF planners, ensuring that both safety and comfort are systematically considered. Moreover, we evaluate the two best-performing planners from our benchmark on a differential-drive robot to provide insights into the real-world deployment of RPF planners. Extensive simulation and real-world experiments provide a quantitative study of the safety-comfort trade-offs of existing planners, while revealing open challenges and future research directions.

30 Sep 2025



Model Predictive Path Integral (MPPI) control has recently emerged as a fast, gradient-free alternative to model-predictive control in highly non-linear robotic tasks, yet it offers no hard guarantees on constraint satisfaction. We introduce Bayesian-Constraints MPPI (BC-MPPI), a lightweight safety layer that attaches a probabilistic surrogate to every state and input constraint. At each re-planning step the surrogate returns the probability that a candidate trajectory is feasible; this joint probability scales the weight given to a candidate, automatically down-weighting rollouts likely to collide or exceed limits and pushing the sampling distribution toward the safe subset; no hand-tuned penalty costs or explicit sample rejection required. We train the surrogate from 1000 offline simulations and deploy the controller on a quadrotor in MuJoCo with both static and moving obstacles. Across K in [100,1500] rollouts BC-MPPI preserves safety margins while satisfying the prescribed probability of violation. Because the surrogate is a stand-alone, version-controlled artefact and the runtime safety score is a single scalar, the approach integrates naturally with verification-and-validation pipelines for certifiable autonomous systems.
10 Mar 2025
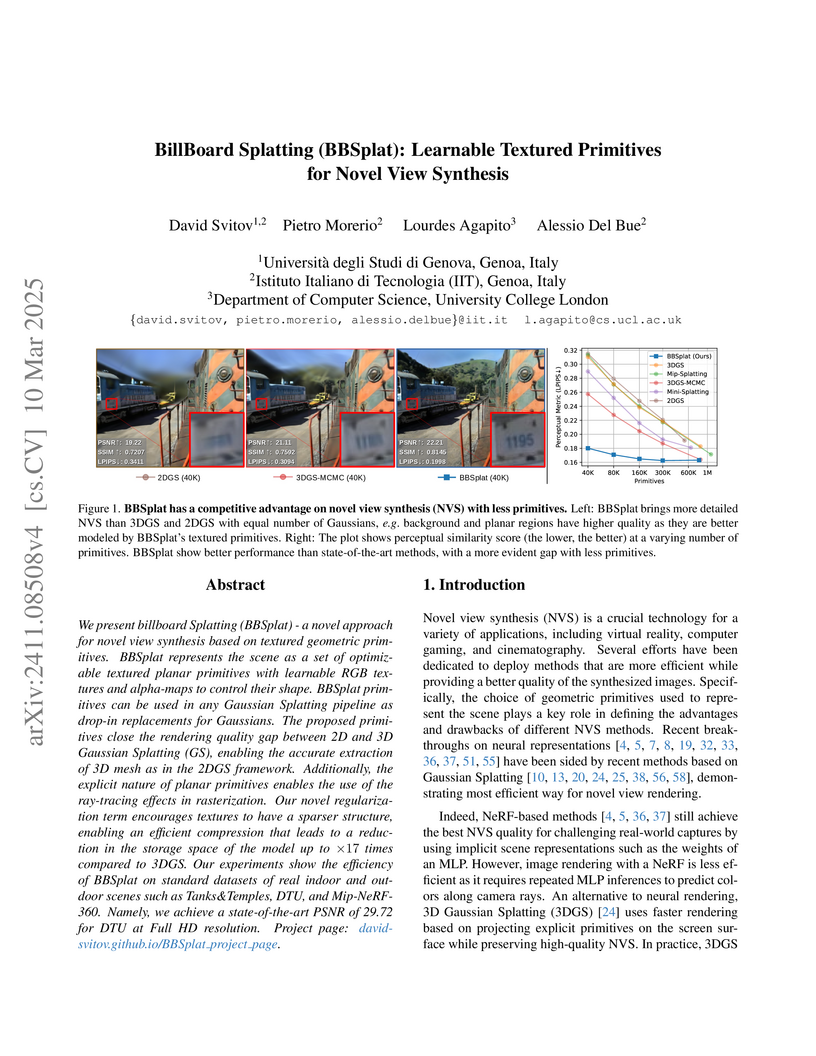
We present billboard Splatting (BBSplat) - a novel approach for novel view
synthesis based on textured geometric primitives. BBSplat represents the scene
as a set of optimizable textured planar primitives with learnable RGB textures
and alpha-maps to control their shape. BBSplat primitives can be used in any
Gaussian Splatting pipeline as drop-in replacements for Gaussians. The proposed
primitives close the rendering quality gap between 2D and 3D Gaussian Splatting
(GS), enabling the accurate extraction of 3D mesh as in the 2DGS framework.
Additionally, the explicit nature of planar primitives enables the use of the
ray-tracing effects in rasterization. Our novel regularization term encourages
textures to have a sparser structure, enabling an efficient compression that
leads to a reduction in the storage space of the model up to x17 times compared
to 3DGS. Our experiments show the efficiency of BBSplat on standard datasets of
real indoor and outdoor scenes such as Tanks&Temples, DTU, and Mip-NeRF-360.
Namely, we achieve a state-of-the-art PSNR of 29.72 for DTU at Full HD
resolution.
03 Dec 2025
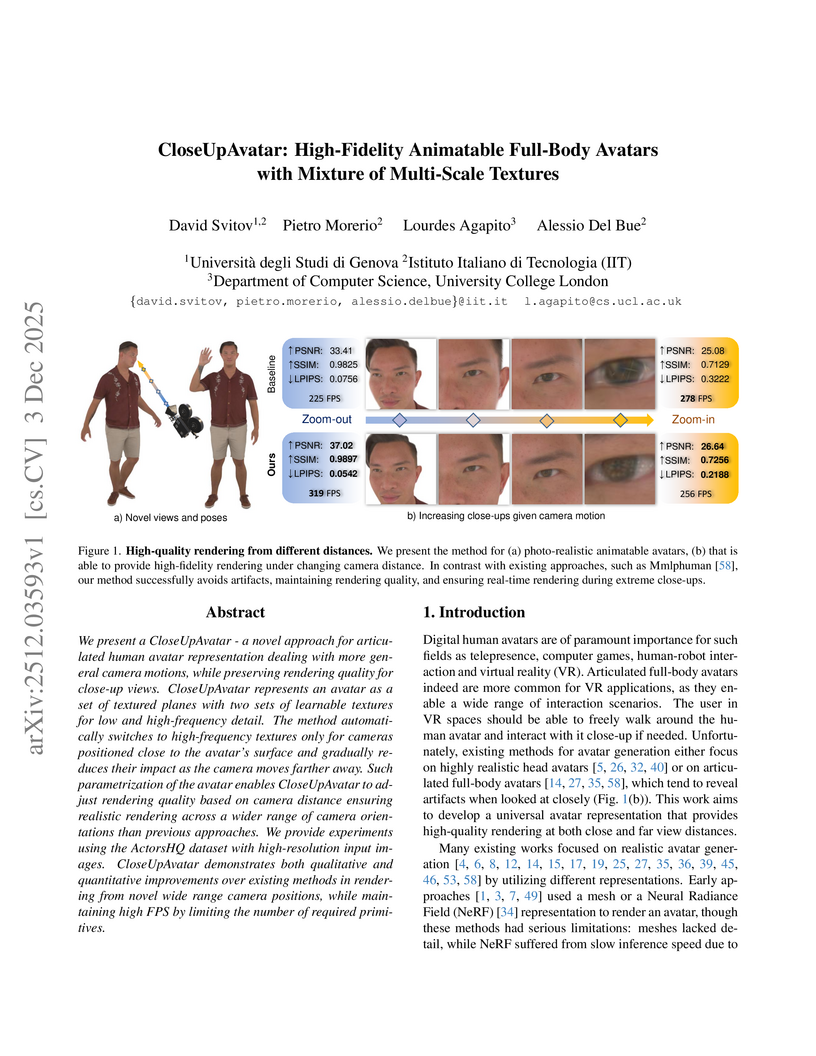
We present a CloseUpAvatar - a novel approach for articulated human avatar representation dealing with more general camera motions, while preserving rendering quality for close-up views. CloseUpAvatar represents an avatar as a set of textured planes with two sets of learnable textures for low and high-frequency detail. The method automatically switches to high-frequency textures only for cameras positioned close to the avatar's surface and gradually reduces their impact as the camera moves farther away. Such parametrization of the avatar enables CloseUpAvatar to adjust rendering quality based on camera distance ensuring realistic rendering across a wider range of camera orientations than previous approaches. We provide experiments using the ActorsHQ dataset with high-resolution input images. CloseUpAvatar demonstrates both qualitative and quantitative improvements over existing methods in rendering from novel wide range camera positions, while maintaining high FPS by limiting the number of required primitives.

15 Jan 2025
Vision-and-Language Navigation in Continuous Environments (VLN-CE) is one of
the most intuitive yet challenging embodied AI tasks. Agents are tasked to
navigate towards a target goal by executing a set of low-level actions,
following a series of natural language instructions. All VLN-CE methods in the
literature assume that language instructions are exact. However, in practice,
instructions given by humans can contain errors when describing a spatial
environment due to inaccurate memory or confusion. Current VLN-CE benchmarks do
not address this scenario, making the state-of-the-art methods in VLN-CE
fragile in the presence of erroneous instructions from human users. For the
first time, we propose a novel benchmark dataset that introduces various types
of instruction errors considering potential human causes. This benchmark
provides valuable insight into the robustness of VLN systems in continuous
environments. We observe a noticeable performance drop (up to -25%) in Success
Rate when evaluating the state-of-the-art VLN-CE methods on our benchmark.
Moreover, we formally define the task of Instruction Error Detection and
Localization, and establish an evaluation protocol on top of our benchmark
dataset. We also propose an effective method, based on a cross-modal
transformer architecture, that achieves the best performance in error detection
and localization, compared to baselines. Surprisingly, our proposed method has
revealed errors in the validation set of the two commonly used datasets for
VLN-CE, i.e., R2R-CE and RxR-CE, demonstrating the utility of our technique in
other tasks. Code and dataset available at
this https URL
28 Sep 2025
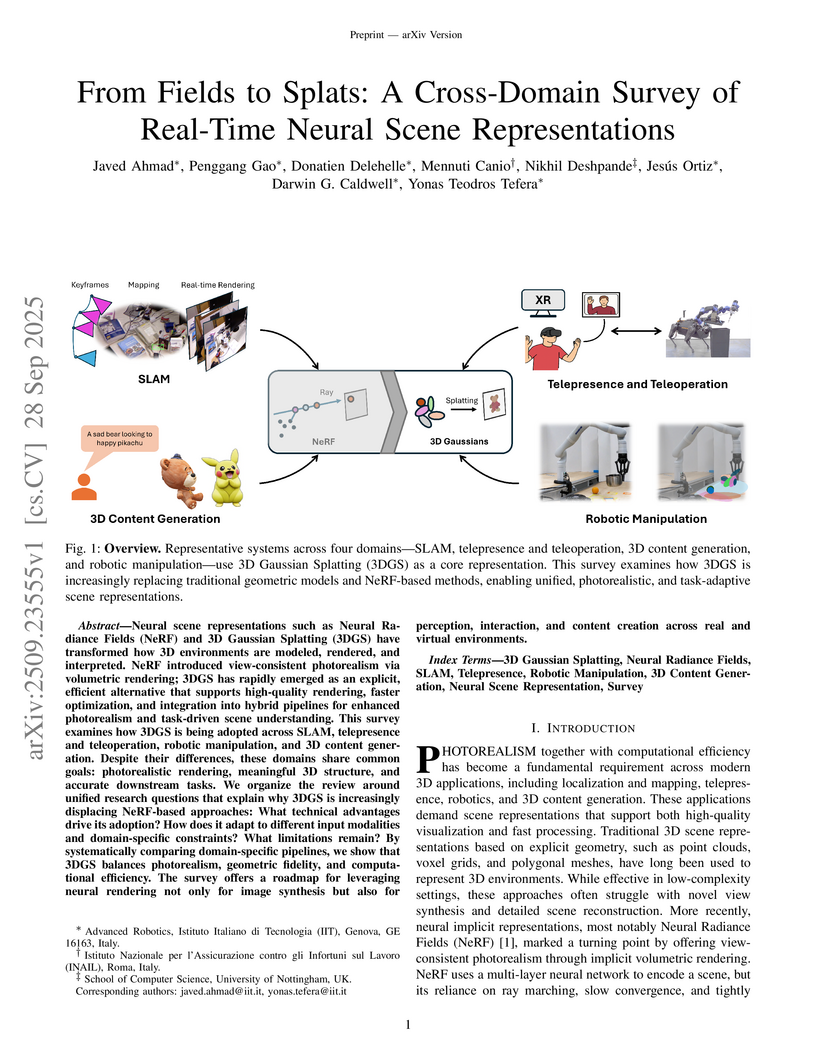
Neural scene representations such as Neural Radiance Fields (NeRF) and 3D Gaussian Splatting (3DGS) have transformed how 3D environments are modeled, rendered, and interpreted. NeRF introduced view-consistent photorealism via volumetric rendering; 3DGS has rapidly emerged as an explicit, efficient alternative that supports high-quality rendering, faster optimization, and integration into hybrid pipelines for enhanced photorealism and task-driven scene understanding. This survey examines how 3DGS is being adopted across SLAM, telepresence and teleoperation, robotic manipulation, and 3D content generation. Despite their differences, these domains share common goals: photorealistic rendering, meaningful 3D structure, and accurate downstream tasks. We organize the review around unified research questions that explain why 3DGS is increasingly displacing NeRF-based approaches: What technical advantages drive its adoption? How does it adapt to different input modalities and domain-specific constraints? What limitations remain? By systematically comparing domain-specific pipelines, we show that 3DGS balances photorealism, geometric fidelity, and computational efficiency. The survey offers a roadmap for leveraging neural rendering not only for image synthesis but also for perception, interaction, and content creation across real and virtual environments.
19 Apr 2024
We introduce Contrastive Gaussian Clustering, a novel approach capable of provide segmentation masks from any viewpoint and of enabling 3D segmentation of the scene. Recent works in novel-view synthesis have shown how to model the appearance of a scene via a cloud of 3D Gaussians, and how to generate accurate images from a given viewpoint by projecting on it the Gaussians before blending their color. Following this example, we train a model to include also a segmentation feature vector for each Gaussian. These can then be used for 3D scene segmentation, by clustering Gaussians according to their feature vectors; and to generate 2D segmentation masks, by projecting the Gaussians on a plane and blending over their segmentation features. Using a combination of contrastive learning and spatial regularization, our method can be trained on inconsistent 2D segmentation masks, and still learn to generate segmentation masks consistent across all views. Moreover, the resulting model is extremely accurate, improving the IoU accuracy of the predicted masks by over the state of the art. Code and trained models will be released soon.
29 Jan 2025

Legged robots are able to navigate complex terrains by continuously interacting with the environment through careful selection of contact sequences and timings. However, the combinatorial nature behind contact planning hinders the applicability of such optimization problems on hardware. In this work, we present a novel approach that optimizes gait sequences and respective timings for legged robots in the context of optimization-based controllers through the use of sampling-based methods and supervised learning techniques. We propose to bootstrap the search by learning an optimal value function in order to speed-up the gait planning procedure making it applicable in real-time. To validate our proposed method, we showcase its performance both in simulation and on hardware using a 22 kg electric quadruped robot. The method is assessed on different terrains, under external perturbations, and in comparison to a standard control approach where the gait sequence is fixed a priori.

11 Jul 2025
Autonomous robot person-following (RPF) systems are crucial for personal assistance and security but suffer from target loss due to occlusions in dynamic, unknown environments. Current methods rely on pre-built maps and assume static environments, limiting their effectiveness in real-world settings. There is a critical gap in re-finding targets under topographic (e.g., walls, corners) and dynamic (e.g., moving pedestrians) occlusions. In this paper, we propose a novel heuristic-guided search framework that dynamically builds environmental maps while following the target and explicitly addresses these two types of occlusions through distinct mechanisms. For topographic occlusions, a belief-guided search field estimates the likelihood of the target's presence and guides search toward promising frontiers. For dynamic occlusions, an observation-based search strategy adaptively switches between a fluid-following field and an overtaking potential field based on occluder motion patterns. Our results demonstrate that the proposed method outperforms existing approaches in terms of search efficiency and success rates, both in simulations and real-world tests. Our target search method enhances the adaptability and reliability of RPF systems in unknown and dynamic environments, supporting their use in real-world applications.
29 Feb 2024
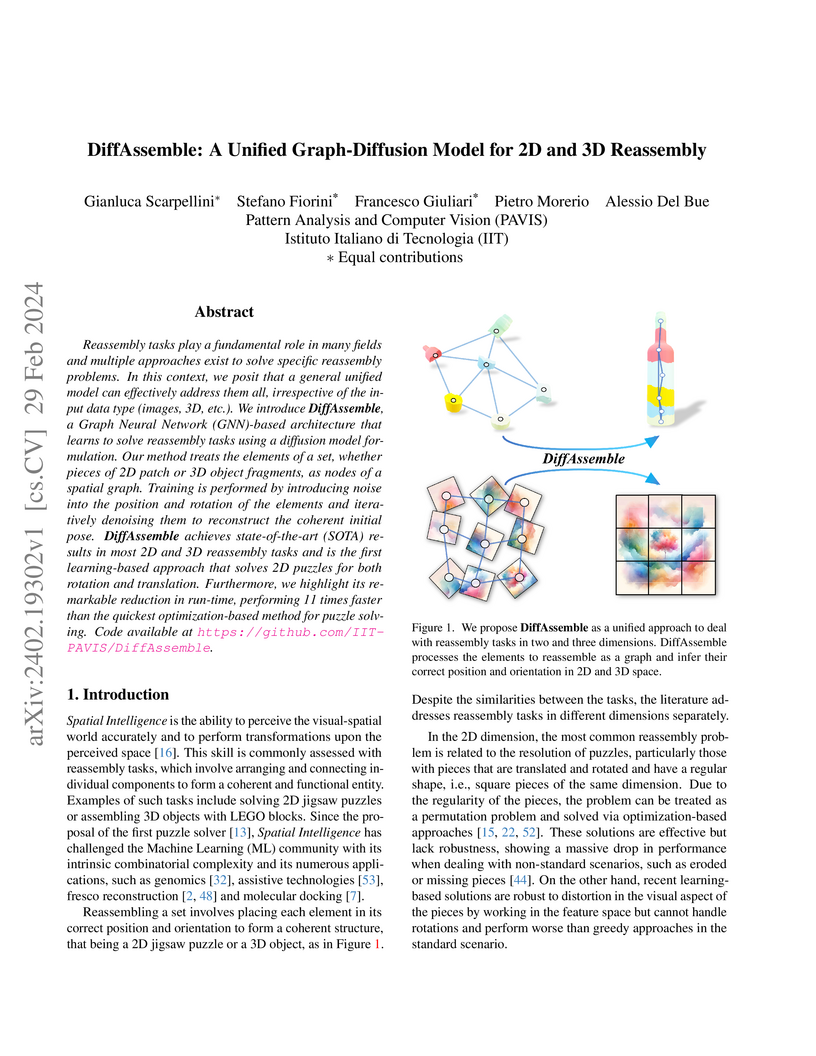
Reassembly tasks play a fundamental role in many fields and multiple approaches exist to solve specific reassembly problems. In this context, we posit that a general unified model can effectively address them all, irrespective of the input data type (images, 3D, etc.). We introduce DiffAssemble, a Graph Neural Network (GNN)-based architecture that learns to solve reassembly tasks using a diffusion model formulation. Our method treats the elements of a set, whether pieces of 2D patch or 3D object fragments, as nodes of a spatial graph. Training is performed by introducing noise into the position and rotation of the elements and iteratively denoising them to reconstruct the coherent initial pose. DiffAssemble achieves state-of-the-art (SOTA) results in most 2D and 3D reassembly tasks and is the first learning-based approach that solves 2D puzzles for both rotation and translation. Furthermore, we highlight its remarkable reduction in run-time, performing 11 times faster than the quickest optimization-based method for puzzle solving. Code available at this https URL

27 May 2024

Friction modeling has always been a challenging problem due to the complexity
of real physical systems. Although a few state-of-the-art structured
data-driven methods show their efficiency in nonlinear system modeling,
deterministic passivity as one of the significant characteristics of friction
is rarely considered in these methods. To address this issue, we propose a
Gaussian Process based model that preserves the inherent structural properties
such as passivity. A matrix-vector physical structure is considered in our
approaches to ensure physical consistency, in particular, enabling a guarantee
of positive semi-definiteness of the damping matrix. An aircraft benchmark
simulation is employed to demonstrate the efficacy of our methodology.
Estimation accuracy and data efficiency are increased substantially by
considering and enforcing more structured physical knowledge. Also, the
fulfillment of the dissipative nature of the aerodynamics is validated
numerically.

02 Dec 2022
This work is on vision-based planning strategies for legged robots that separate locomotion planning into foothold selection and pose adaptation. Current pose adaptation strategies optimize the robot's body pose relative to given footholds. If these footholds are not reached, the robot may end up in a state with no reachable safe footholds. Therefore, we present a Vision-Based Terrain-Aware Locomotion (ViTAL) strategy that consists of novel pose adaptation and foothold selection algorithms. ViTAL introduces a different paradigm in pose adaptation that does not optimize the body pose relative to given footholds, but the body pose that maximizes the chances of the legs in reaching safe footholds. ViTAL plans footholds and poses based on skills that characterize the robot's capabilities and its terrain-awareness. We use the 90 kg HyQ and 140 kg HyQReal quadruped robots to validate ViTAL, and show that they are able to climb various obstacles including stairs, gaps, and rough terrains at different speeds and gaits. We compare ViTAL with a baseline strategy that selects the robot pose based on given selected footholds, and show that ViTAL outperforms the baseline.

27 Sep 2024
The creation of digital replicas of physical objects has valuable applications for the preservation and dissemination of tangible cultural heritage. However, existing methods are often slow, expensive, and require expert knowledge. We propose a pipeline to generate a 3D replica of a scene using only RGB images (e.g. photos of a museum) and then extract a model for each item of interest (e.g. pieces in the exhibit). We do this by leveraging the advancements in novel view synthesis and Gaussian Splatting, modified to enable efficient 3D segmentation. This approach does not need manual annotation, and the visual inputs can be captured using a standard smartphone, making it both affordable and easy to deploy. We provide an overview of the method and baseline evaluation of the accuracy of object segmentation. The code is available at this https URL.
30 May 2023

Developing feasible body trajectories for legged systems on arbitrary terrains is a challenging task. In this paper, we present a paradigm that allows to design feasible Center of Mass (CoM) and body trajectories in an efficient manner. In our previous work [1], we introduced the notion of the 2D feasible region, where static balance and the satisfaction of joint torque limits were guaranteed, whenever the projection of the CoM lied inside the proposed admissible region. In this work we propose a general formulation of the improved feasible region that guarantees dynamic balance alongside the satisfaction of both joint-torque and kinematic limits in an efficient manner. To incorporate the feasibility of the kinematic limits, we introduce an algorithm that computes the reachable region of the CoM. Furthermore, we propose an efficient planning strategy that utilizes the improved feasible region to design feasible CoM and body orientation trajectories. Finally, we validate the capabilities of the improved feasible region and the effectiveness of the proposed planning strategy, using simulations and experiments on the 90 kg Hydraulically actuated Quadruped (HyQ) and the 21 kg Aliengo robots.

10 Jul 2023
We propose a control pipeline for SAG (Searching, Approaching, and Grasping)
of objects, based on a decoupled arm kinematic chain and impedance control,
which integrates image-based visual servoing (IBVS). The kinematic decoupling
allows for fast end-effector motions and recovery that leads to robust visual
servoing. The whole approach and pipeline can be generalized for any mobile
platform (wheeled or tracked vehicles), but is most suitable for dynamically
moving quadruped manipulators thanks to their reactivity against disturbances.
The compliance of the impedance controller makes the robot safer for
interactions with humans and the environment. We demonstrate the performance
and robustness of the proposed approach with various experiments on our 140 kg
HyQReal quadruped robot equipped with a 7-DoF manipulator arm. The experiments
consider dynamic locomotion, tracking under external disturbances, and fast
motions of the target object.
20 Sep 2016
We have tested the original interaction-strength-interpolation (ISI) exchange-correlation functional for main group chemistry. The ISI functional is based on an interpolation between the weak and strong coupling limits and includes exact-exchange as well as the Görling-Levy second-order energy. We have analyzed in detail the basis-set dependence of the ISI functional, its dependence on the ground-state orbitals, and the influence of the size-consistency problem. We show and explain some of the expected limitations of the ISI functional (i.e. for atomization energies), but also unexpected results, such as the good performance for the interaction energy of dispersion-bonded complexes when the ISI correlation is used as a correction to Hartree-Fock.

22 Oct 2023

The use of simulated data in the field of causal discovery is ubiquitous due
to the scarcity of annotated real data. Recently, Reisach et al., 2021
highlighted the emergence of patterns in simulated linear data, which displays
increasing marginal variance in the casual direction. As an ablation in their
experiments, Montagna et al., 2023 found that similar patterns may emerge in
nonlinear models for the variance of the score vector $\nabla \log
p_{\mathbf{X}}$, and introduced the ScoreSort algorithm. In this work, we
formally define and characterize this score-sortability pattern of nonlinear
additive noise models. We find that it defines a class of identifiable
(bivariate) causal models overlapping with nonlinear additive noise models. We
theoretically demonstrate the advantages of ScoreSort in terms of statistical
efficiency compared to prior state-of-the-art score matching-based methods and
empirically show the score-sortability of the most common synthetic benchmarks
in the literature. Our findings remark (1) the lack of diversity in the data as
an important limitation in the evaluation of nonlinear causal discovery
approaches, (2) the importance of thoroughly testing different settings within
a problem class, and (3) the importance of analyzing statistical properties in
causal discovery, where research is often limited to defining identifiability
conditions of the model.

12 Sep 2023
Quadruped robots are machines intended for challenging and harsh
environments. Despite the progress in locomotion strategy, safely recovering
from unexpected falls or planned drops is still an open problem. It is further
made more difficult when high horizontal velocities are involved. In this work,
we propose an optimization-based reactive Landing Controller that uses only
proprioceptive measures for torque-controlled quadruped robots that free-fall
on a flat horizontal ground, knowing neither the distance to the landing
surface nor the flight time. Based on an estimate of the Center of Mass
horizontal velocity, the method uses the Variable Height Springy Inverted
Pendulum model for continuously recomputing the feet position while the robot
is falling. In this way, the quadruped is ready to attain a successful landing
in all directions, even in the presence of significant horizontal velocities.
The method is demonstrated to dramatically enlarge the region of horizontal
velocities that can be dealt with by a naive approach that keeps the feet still
during the airborne stage. To the best of our knowledge, this is the first time
that a quadruped robot can successfully recover from falls with horizontal
velocities up to 3 m/s in simulation. Experiments prove that the used platform,
Go1, can successfully attain a stable standing configuration from falls with
various horizontal velocity and different angular perturbations.

31 Jul 2025
Explainability in artificial intelligence (XAI) remains a crucial aspect for fostering trust and understanding in machine learning models. Current visual explanation techniques, such as gradient-based or class-activation-based methods, often exhibit a strong dependence on specific model architectures. Conversely, perturbation-based methods, despite being model-agnostic, are computationally expensive as they require evaluating models on a large number of forward passes. In this work, we introduce Foveation-based Explanations (FovEx), a novel XAI method inspired by human vision. FovEx seamlessly integrates biologically inspired perturbations by iteratively creating foveated renderings of the image and combines them with gradient-based visual explorations to determine locations of interest efficiently. These locations are selected to maximize the performance of the model to be explained with respect to the downstream task and then combined to generate an attribution map. We provide a thorough evaluation with qualitative and quantitative assessments on established benchmarks. Our method achieves state-of-the-art performance on both transformers (on 4 out of 5 metrics) and convolutional models (on 3 out of 5 metrics), demonstrating its versatility among various architectures. Furthermore, we show the alignment between the explanation map produced by FovEx and human gaze patterns (+14\% in NSS compared to RISE, +203\% in NSS compared to GradCAM). This comparison enhances our confidence in FovEx's ability to close the interpretation gap between humans and machines.
There are no more papers matching your filters at the moment.
