14 Sep 2025

Complex networks have become essential tools for understanding diverse phenomena in social systems, traffic systems, biomolecular systems, and financial systems. Identifying critical nodes is a central theme in contemporary research, serving as a vital bridge between theoretical foundations and practical applications. Nevertheless, the intrinsic complexity and structural heterogeneity characterizing real-world networks, with particular emphasis on dynamic and higher-order networks, present substantial obstacles to the development of universal frameworks for critical node identification. This paper provides a comprehensive review of critical node identification techniques, categorizing them into seven main classes: centrality, critical nodes deletion problem, influence maximization, network control, artificial intelligence, higher-order and dynamic methods. Our review bridges the gaps in existing surveys by systematically classifying methods based on their methodological foundations and practical implications, and by highlighting their strengths, limitations, and applicability across different network types. Our work enhances the understanding of critical node research by identifying key challenges, such as algorithmic universality, real-time evaluation in dynamic networks, analysis of higher-order structures, and computational efficiency in large-scale networks. The structured synthesis consolidates current progress and highlights open questions, particularly in modeling temporal dynamics, advancing efficient algorithms, integrating machine learning approaches, and developing scalable and interpretable metrics for complex systems.

17 Sep 2025
Randerath {\em et al.} [Discrete Math. 251 (2002) 137-153] proved that every -free graph satisfies . Pyatkin [Discrete Math. 313 (2013) 715-720] proved that every -free graph satisfies . In this paper, we prove that for a connected -free graph , either has two nonadjacent vertices such that , or is 3-colorable, or contains Grőtzsch graph as an induced subgraph and is an induced subgraph of Clebsch graph. Consequently, we have determined the chromatic number of -free graph is 4.
A graph is {\em perfectly divisible} if, for each induced subgraph of , can be partitioned into and such that is perfect and \omega(H[B])<\omega(H). A {\em bull} is a graph consisting of a triangle with two disjoint pendant edges. Deng and Chang [Graphs Combin. (2025) 41: 63] proved that every (, bull)-free graph with has a partition such that is perfect and has clique number less than if admits no homogeneous set; Chen and Wang [arXiv:2507.18506v2] proved that such property is also true for (, bull)-free graphs. In this paper, we prove that a (, bull)-free graph is perfectly divisible if and only if it contains no Grőtzsch graph.
13 Aug 2024
Huang et al. provide the first systematic review of deep learning techniques applied to group-level emotion recognition, categorizing current computational approaches and highlighting the challenges in understanding collective emotional states influenced by social dynamics and contextual factors. The survey outlines the evolution of methods and datasets from 2012 to 2023, serving as a comprehensive reference and roadmap for the field.
26 Sep 2025
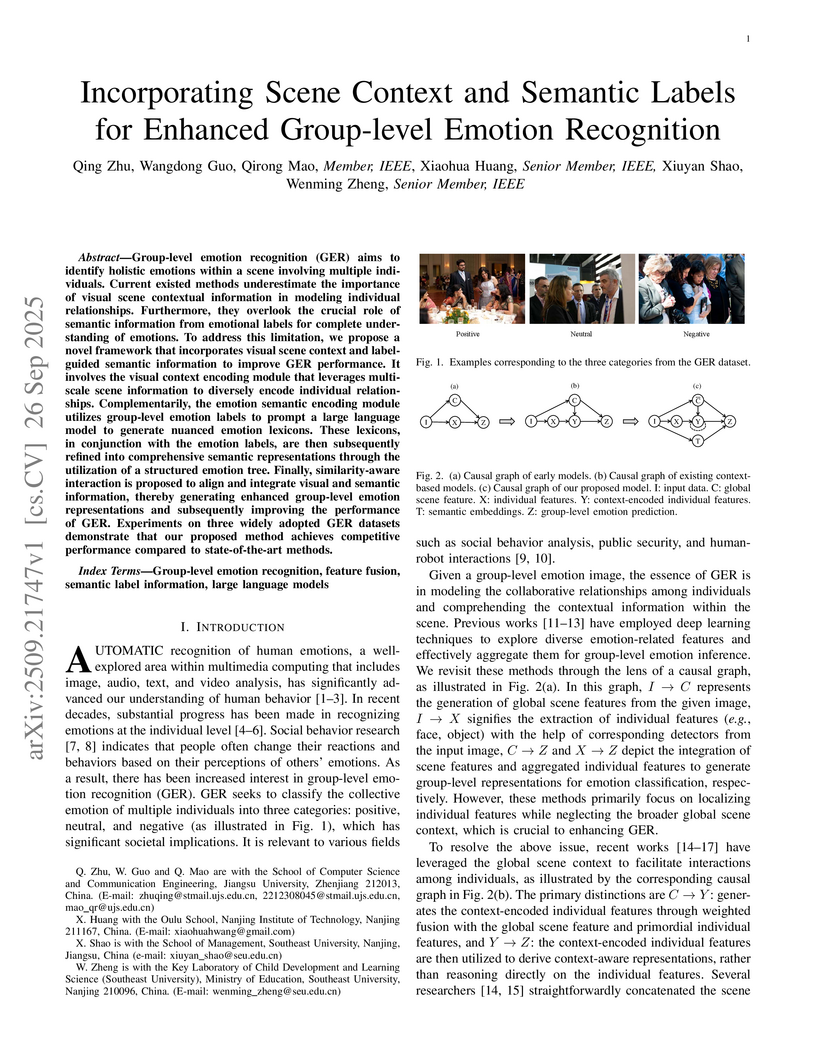
Group-level emotion recognition (GER) aims to identify holistic emotions within a scene involving multiple individuals. Current existed methods underestimate the importance of visual scene contextual information in modeling individual relationships. Furthermore, they overlook the crucial role of semantic information from emotional labels for complete understanding of emotions. To address this limitation, we propose a novel framework that incorporates visual scene context and label-guided semantic information to improve GER performance. It involves the visual context encoding module that leverages multi-scale scene information to diversely encode individual relationships. Complementarily, the emotion semantic encoding module utilizes group-level emotion labels to prompt a large language model to generate nuanced emotion lexicons. These lexicons, in conjunction with the emotion labels, are then subsequently refined into comprehensive semantic representations through the utilization of a structured emotion tree. Finally, similarity-aware interaction is proposed to align and integrate visual and semantic information, thereby generating enhanced group-level emotion representations and subsequently improving the performance of GER. Experiments on three widely adopted GER datasets demonstrate that our proposed method achieves competitive performance compared to state-of-the-art methods.
11 Mar 2021

The development of aerial autonomy has enabled aerial robots to fly agilely
in complex environments. However, dodging fast-moving objects in flight remains
a challenge, limiting the further application of unmanned aerial vehicles
(UAVs). The bottleneck of solving this problem is the accurate perception of
rapid dynamic objects. Recently, event cameras have shown great potential in
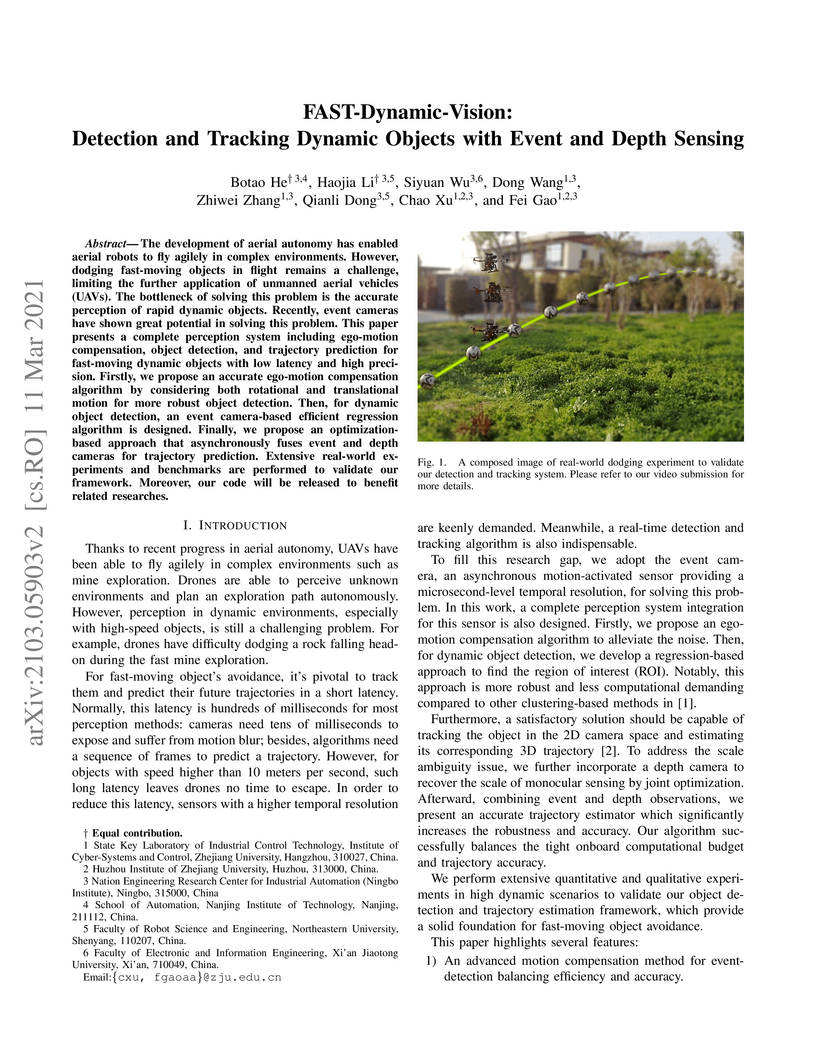
solving this problem. This paper presents a complete perception system
including ego-motion compensation, object detection, and trajectory prediction
for fast-moving dynamic objects with low latency and high precision. Firstly,
we propose an accurate ego-motion compensation algorithm by considering both
rotational and translational motion for more robust object detection. Then, for
dynamic object detection, an event camera-based efficient regression algorithm
is designed. Finally, we propose an optimizationbased approach that
asynchronously fuses event and depth cameras for trajectory prediction.
Extensive real-world experiments and benchmarks are performed to validate our
framework. Moreover, our code will be released to benefit related researches.

20 Nov 2025
Hubei Key Laboratory of Applied Mathematics Shanghai Jiao Tong UniversityNanjing University of Information Science and TechnologyNeijiang Normal UniversityHainan Normal UniversityNanjing Institute of TechnologyHubei UniversityKey Laboratory of System Control and Information Processing, Ministry of EducationKey Laboratory of Computational Science and Application of Hainan ProvinceCenter for Applied Mathematics of Jiangsu ProvinceJiangsu International Joint Laboratory on System Modeling and Data AnalysisKey Laboratory of Numerical Simulation of Sichuan Provincial Universities
Shanghai Jiao Tong UniversityNanjing University of Information Science and TechnologyNeijiang Normal UniversityHainan Normal UniversityNanjing Institute of TechnologyHubei UniversityKey Laboratory of System Control and Information Processing, Ministry of EducationKey Laboratory of Computational Science and Application of Hainan ProvinceCenter for Applied Mathematics of Jiangsu ProvinceJiangsu International Joint Laboratory on System Modeling and Data AnalysisKey Laboratory of Numerical Simulation of Sichuan Provincial Universities
Shanghai Jiao Tong UniversityNanjing University of Information Science and TechnologyNeijiang Normal UniversityHainan Normal UniversityNanjing Institute of TechnologyHubei UniversityKey Laboratory of System Control and Information Processing, Ministry of EducationKey Laboratory of Computational Science and Application of Hainan ProvinceCenter for Applied Mathematics of Jiangsu ProvinceJiangsu International Joint Laboratory on System Modeling and Data AnalysisKey Laboratory of Numerical Simulation of Sichuan Provincial UniversitiesGraph spectral representations are fundamental in graph signal processing, offering a rigorous framework for analyzing and processing graph-structured data. The graph fractional Fourier transform (GFRFT) extends the classical graph Fourier transform (GFT) with a fractional-order parameter, enabling flexible spectral analysis while preserving mathematical consistency. The angular graph Fourier transform (AGFT) introduces angular control via GFT eigenvector rotation; however, existing constructions fail to degenerate to the GFT at zero angle, which is a critical flaw that undermines theoretical consistency and interpretability. To resolve these complementary limitations - GFRFT's lack of angular regulation and AGFT's defective degeneracy - this study proposes an angular GFRFT (AGFRFT), a unified framework that integrates fractional-order and angular spectral analyses with theoretical rigor. A degeneracy-friendly rotation matrix family ensures exact GFT degeneration at zero angle, with two AGFRFT variants (I-AGFRFT and II-AGFRFT) defined accordingly. Rigorous theoretical analyses confirm their unitarity, invertibility, and smooth parameter dependence. Both support learnable joint parameterization of the angle and fractional order, enabling adaptive spectral processing for diverse graph signals. Extensive experiments on real-world data denoising, image denoising, and point cloud denoising demonstrate that AGFRFT outperforms GFRFT and AGFT in terms of spectral concentration, reconstruction quality, and controllable spectral manipulation, establishing a robust and flexible tool for integrated angular fractional spectral analysis in graph signal processing.

12 Jun 2025
Ensuring the safety and extended operational life of fighter aircraft
necessitates frequent and exhaustive inspections. While surface defect
detection is feasible for human inspectors, manual methods face critical
limitations in scalability, efficiency, and consistency due to the vast surface
area, structural complexity, and operational demands of aircraft maintenance.
We propose a smart surface damage detection and localization system for fighter
aircraft, termed J-DDL. J-DDL integrates 2D images and 3D point clouds of the
entire aircraft surface, captured using a combined system of laser scanners and
cameras, to achieve precise damage detection and localization. Central to our
system is a novel damage detection network built on the YOLO architecture,
specifically optimized for identifying surface defects in 2D aircraft images.
Key innovations include lightweight Fasternet blocks for efficient feature
extraction, an optimized neck architecture incorporating Efficient Multiscale
Attention (EMA) modules for superior feature aggregation, and the introduction
of a novel loss function, Inner-CIOU, to enhance detection accuracy. After
detecting damage in 2D images, the system maps the identified anomalies onto
corresponding 3D point clouds, enabling accurate 3D localization of defects
across the aircraft surface. Our J-DDL not only streamlines the inspection
process but also ensures more comprehensive and detailed coverage of large and
complex aircraft exteriors. To facilitate further advancements in this domain,
we have developed the first publicly available dataset specifically focused on
aircraft damage. Experimental evaluations validate the effectiveness of our
framework, underscoring its potential to significantly advance automated
aircraft inspection technologies.
27 Nov 2024
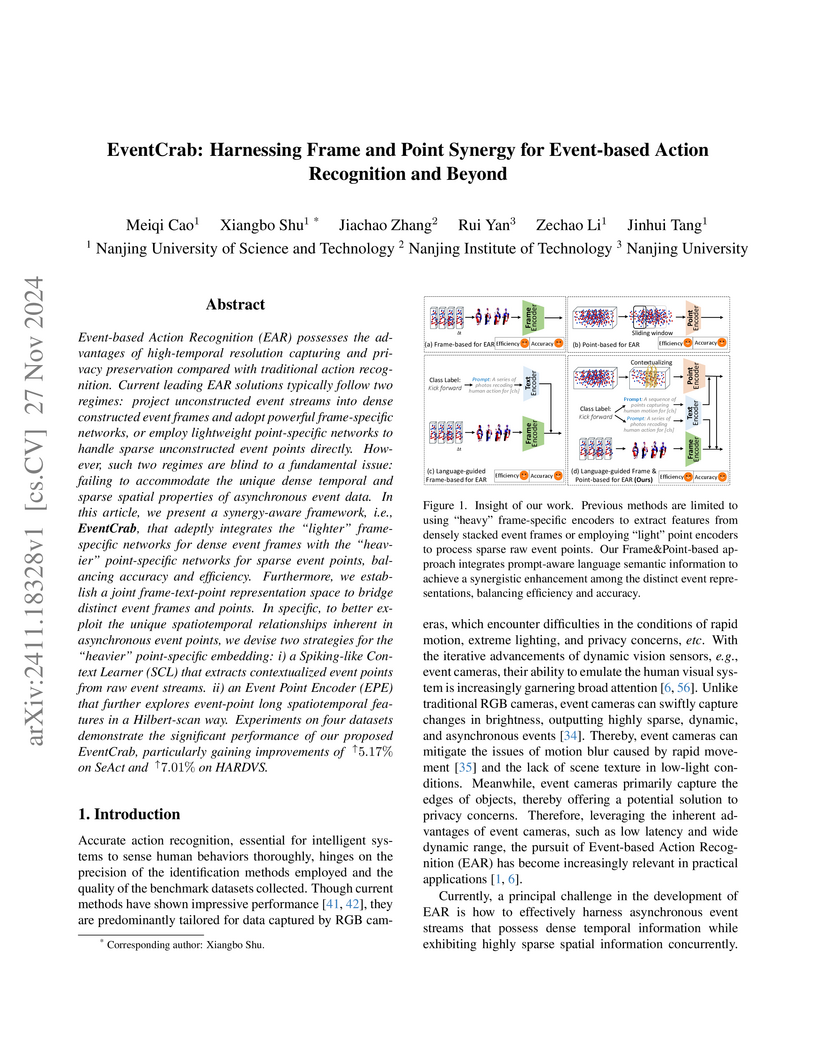
Event-based Action Recognition (EAR) possesses the advantages of high-temporal resolution capturing and privacy preservation compared with traditional action recognition. Current leading EAR solutions typically follow two regimes: project unconstructed event streams into dense constructed event frames and adopt powerful frame-specific networks, or employ lightweight point-specific networks to handle sparse unconstructed event points directly. However, such two regimes are blind to a fundamental issue: failing to accommodate the unique dense temporal and sparse spatial properties of asynchronous event data. In this article, we present a synergy-aware framework, i.e., EventCrab, that adeptly integrates the "lighter" frame-specific networks for dense event frames with the "heavier" point-specific networks for sparse event points, balancing accuracy and efficiency. Furthermore, we establish a joint frame-text-point representation space to bridge distinct event frames and points. In specific, to better exploit the unique spatiotemporal relationships inherent in asynchronous event points, we devise two strategies for the "heavier" point-specific embedding: i) a Spiking-like Context Learner (SCL) that extracts contextualized event points from raw event streams. ii) an Event Point Encoder (EPE) that further explores event-point long spatiotemporal features in a Hilbert-scan way. Experiments on four datasets demonstrate the significant performance of our proposed EventCrab, particularly gaining improvements of 5.17% on SeAct and 7.01% on HARDVS.

16 Jun 2025

In recent years, complexity compression of neural network (NN)-based speech
enhancement (SE) models has gradually attracted the attention of researchers,
especially in scenarios with limited hardware resources or strict latency
requirements. The main difficulties and challenges lie in achieving a balance
between complexity and performance according to the characteristics of the
task. In this paper, we propose an intra-inter set knowledge distillation (KD)
framework with time-frequency calibration (IS-TFCKD) for SE. Different from
previous distillation strategies for SE, the proposed framework fully utilizes
the time-frequency differential information of speech while promoting global
knowledge flow. Firstly, we propose a multi-layer interactive distillation
based on dual-stream time-frequency cross-calibration, which calculates the
teacher-student similarity calibration weights in the time and frequency
domains respectively and performs cross-weighting, thus enabling refined
allocation of distillation contributions across different layers according to
speech characteristics. Secondly, we construct a collaborative distillation
paradigm for intra-set and inter-set correlations. Within a correlated set,
multi-layer teacher-student features are pairwise matched for calibrated
distillation. Subsequently, we generate representative features from each
correlated set through residual fusion to form the fused feature set that
enables inter-set knowledge interaction. The proposed distillation strategy is
applied to the dual-path dilated convolutional recurrent network (DPDCRN) that
ranked first in the SE track of the L3DAS23 challenge. Objective evaluations
demonstrate that the proposed KD strategy consistently and effectively improves
the performance of the low-complexity student model and outperforms other
distillation schemes.
13 Mar 2025
This paper devotes to combine the chirp basis function transformation and
symplectic coordinates transformation to yield a novel Wigner distribution (WD)
associated with the linear canonical transform (LCT), named as the symplectic
WD in the LCT domain (SWDL). It incorporates the merits of the symplectic WD
(SWD) and the WD in the LCT domain (WDL), achieving stronger capability in the
linear frequency-modulated (LFM) signal frequency rate feature extraction while
maintaining the same level of computational complexity. Some essential
properties of the SWDL are derived, including marginal distributions, energy
conservations, unique reconstruction, Moyal formula, complex conjugate
symmetry, time reversal symmetry, scaling property, time translation property,
frequency modulation property, and time translation and frequency modulation
property. Heisenberg's uncertainty principles of the SWDL are formulated,
giving rise to three kinds of lower bounds attainable respectively by Gaussian
enveloped complex exponential signal, Gaussian signal and Gaussian enveloped
chirp signal. The optimal symplectic matrices corresponding to the highest
time-frequency resolution are generated by solving the lower bound optimization
(minimization) problem. The time-frequency resolution of the SWDL is compared
with those of the SWD and WDL to demonstrate its superiority in LFM signals
time-frequency energy concentration. A synthesis example is also carried out to
verify the feasibility and reliability of the theoretical analysis.
24 May 2019
Transmit Antenna Selection and Beamformer Design for Secure Spatial Modulation with rough CSI of Eve
Transmit Antenna Selection and Beamformer Design for Secure Spatial Modulation with rough CSI of Eve
The security of spatial modulation (SM) aided networks can always be improved
by reducing the desired link's power at the cost of degrading its bit error
ratio performance and assuming the power consumed to artificial noise (AN)
projection (ANP). We formulate the joint optimization problem of maximizing the
secrecy rate (Max-SR) over the transmit antenna selection and ANP in the
context of secure SM-aided networks, which is mathematically a non-linear mixed
integer programming problem. In order to solve this problem, we provide a pair
of solutions, namely joint and separate solutions. Specifically, an accurate
approximation of the SR is used for reducing the computational complexity, and
the optimal AN covariance matrix (ANCM) is found by convex optimization for any
given active antenna group (AAG). Then, given a large set of AAGs, simulated
annealing mechanism is invoked for optimizing the choice of AAG, where the
corresponding ANCM is recomputed by this optimization method as well when the
AAG changes. To further reduce the complexity of the above-mentioned joint
optimization, a low-complexity two-stage separate optimization method is also
proposed. Furthermore, when the number of transmit antennas tends to infinity,
the Max-SR problem becomes equivalent to that of maximizing the ratio of the
desired user's signal-to-interference-plus-noise ratio to the eavesdropper's.
Thus our original problem reduces to a fractional programming problem, hence a
significant computational complexity reduction can be achieved for the
optimization problem. Our simulation results show that the proposed algorithms
outperform the existing leakage-based null-space projection scheme in terms of
the SR performance attained, and drastically reduces the complexity at a slight
SR performance reduction.
06 Apr 2025
An {\em odd hole} in a graph is an induced subgraph which is a cycle of odd
length at least five. An {\em odd parachute} is a graph obtained from an odd
hole by adding a new edge such that is adjacent to but not to
for each . A graph is perfectly divisible if for each
induced subgraph of , can be partitioned into and such
that is perfect and \omega(H[B])<\omega(H). A vertex of a graph is
{\em trisimplicial} if its neighbourhood is the union of three cliques. In this
paper, we prove that if is a (fork,
odd parachute)-free graph by showing that contains a trisimplicial vertex
when is nonperfectly divisible. This generalizes some results of Karthick,
Kaufmann and Sivaraman [{\em Electron. J. Combin.} \textbf{29} (2022) \#P3.19],
and Wu and Xu [{\em Discrete Math.} \textbf{347} (2024) 114121]. As a
corollary, every nonperfectly divisible claw-free graph contains a
trisimplicial vertex.

13 Jul 2025
The off-shell characteristics of pion generalized parton distributions (GPDs) and transverse momentum dependent parton distributions (TMDs) are examined within the framework of the Nambu-Jona-Lasinio model. In our previous papers, we separately investigated the properties of on-shell pion GPDs and light-front wave functions. It is particularly intriguing to compare the differences between on-shell and off-shell pion GPDs, which allows us to explore the effects associated with off-shellness. Due to the absence of crossing symmetry, the moments of GPDs also incorporate odd powers of the skewness parameter, resulting in new off-shell form factors. Through our calculations, we derived correction functions that account for modifications in pion GPDs due to off-shell effects. Unlike their on-shell counterparts, certain properties break down in the off-shell scenario; for instance, symmetry properties and polynomiality conditions may no longer hold. Additionally, we evaluate off-shell TMDs and compare them with their on-shell equivalents while also investigating their dependence on .
07 Feb 2022
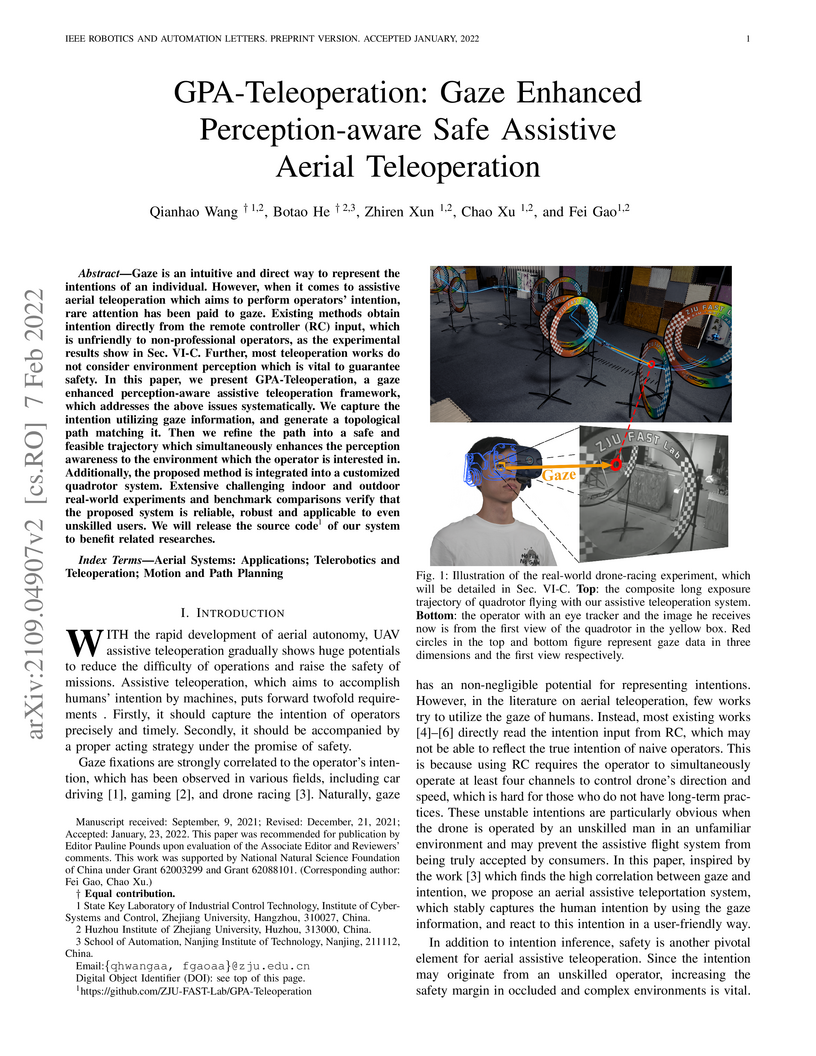
Gaze is an intuitive and direct way to represent the intentions of an
individual. However, when it comes to assistive aerial teleoperation which aims
to perform operators' intention, rare attention has been paid to gaze. Existing
methods obtain intention directly from the remote controller (RC) input, which
is inaccurate, unstable, and unfriendly to non-professional operators. Further,
most teleoperation works do not consider environment perception which is vital
to guarantee safety. In this paper, we present GPA-Teleoperation, a gaze
enhanced perception-aware assistive teleoperation framework, which addresses
the above issues systematically. We capture the intention utilizing gaze
information, and generate a topological path matching it. Then we refine the
path into a safe and feasible trajectory which simultaneously enhances the
perception awareness to the environment operators are interested in.
Additionally, the proposed method is integrated into a customized quadrotor
system. Extensive challenging indoor and outdoor real-world experiments and
benchmark comparisons verify that the proposed system is reliable, robust and
applicable to even unskilled users. We will release the source code of our
system to benefit related researches.
28 Nov 2022
Cell Biomechanical Modeling Based on Membrane Theory with Considering Speed Effect of Microinjection
Cell Biomechanical Modeling Based on Membrane Theory with Considering Speed Effect of Microinjection
As an effective method to deliver external materials into biological cells,
microinjection has been widely applied in the biomedical field. However, the
cognition of cell mechanical property is still inadequate, which greatly limits
the efficiency and success rate of injection. Thus, a new rate-dependent
mechanical model based on membrane theory is proposed for the first time. In
this model, an analytical equilibrium equation between the injection force and
cell deformation is established by considering the speed effect of
microinjection. Different from the traditional membrane-theory-based model, the
elastic coefficient of the constitutive material in the proposed model is
modified as a function of the injection velocity and acceleration, effectively
simulating the influence of speeds on the mechanical responses and providing a
more generalized and practical model. Using this model, other mechanical
responses at different speeds can be also accurately predicted, including the
distribution of membrane tension and stress and the deformed shape. To verify
the validity of the model, numerical simulations and experiments are carried
out. The results show that the proposed model can match the real mechanical
responses well at different injection speeds.
03 Mar 2023
Micro-expression recognition (MER) draws intensive research interest as micro-expressions (MEs) can infer genuine emotions. Prior information can guide the model to learn discriminative ME features effectively. However, most works focus on researching the general models with a stronger representation ability to adaptively aggregate ME movement information in a holistic way, which may ignore the prior information and properties of MEs. To solve this issue, driven by the prior information that the category of ME can be inferred by the relationship between the actions of facial different components, this work designs a novel model that can conform to this prior information and learn ME movement features in an interpretable way. Specifically, this paper proposes a Decomposition and Reconstruction-based Graph Representation Learning (DeRe-GRL) model to effectively learn high-level ME features. DeRe-GRL includes two modules: Action Decomposition Module (ADM) and Relation Reconstruction Module (RRM), where ADM learns action features of facial key components and RRM explores the relationship between these action features. Based on facial key components, ADM divides the geometric movement features extracted by the graph model-based backbone into several sub-features, and learns the map matrix to map these sub-features into multiple action features; then, RRM learns weights to weight all action features to build the relationship between action features. The experimental results demonstrate the effectiveness of the proposed modules, and the proposed method achieves competitive performance.
03 Apr 2025
 University of Cambridge
University of Cambridge Chinese Academy of Sciences
Chinese Academy of Sciences Carnegie Mellon UniversitySichuan University
Carnegie Mellon UniversitySichuan University Beihang UniversitySungkyunkwan University
Beihang UniversitySungkyunkwan University Nanjing University
Nanjing University Tsinghua UniversityPanjab University
Tsinghua UniversityPanjab University Zhejiang UniversityUniversity of Electronic Science and Technology of ChinaUniversity of EdinburghNankai University
Zhejiang UniversityUniversity of Electronic Science and Technology of ChinaUniversity of EdinburghNankai University Peking UniversityJoint Institute for Nuclear ResearchUppsala UniversityGuangxi Normal UniversityCentral China Normal University
Peking UniversityJoint Institute for Nuclear ResearchUppsala UniversityGuangxi Normal UniversityCentral China Normal University Shandong UniversityLanzhou UniversityIndian Institute of Technology MadrasSoochow UniversityHunan UniversityTechnische Universität MünchenZhejiang Normal University
Shandong UniversityLanzhou UniversityIndian Institute of Technology MadrasSoochow UniversityHunan UniversityTechnische Universität MünchenZhejiang Normal University University of GroningenNanjing Normal UniversityYantai UniversityGuangxi UniversityChina University of GeosciencesSuranaree University of TechnologyShanxi UniversityInner Mongolia UniversityTaiyuan University of TechnologyZhengzhou UniversityCOMSATS University IslamabadINFN, Laboratori Nazionali di FrascatiHenan Normal UniversityUniversity of Hawai’iNanjing Institute of TechnologyINFN Sezione di PerugiaInstitute of high-energy PhysicsJustus Liebig University GiessenJohannes Gutenberg University of MainzCollege of William and MaryINFN-Sezione di GenovaHelmholtz-Institut für Strahlen-und KernphysikINFN Sezione di LecceLiaoning Normal UniversityVariable Energy Cyclotron CentreUniversity of Science and Technology LiaoningG.I. Budker Institute of Nuclear PhysicsUniversity of GiessenINFN-Sezione di FerraraRuhr-University-Bochum
University of GroningenNanjing Normal UniversityYantai UniversityGuangxi UniversityChina University of GeosciencesSuranaree University of TechnologyShanxi UniversityInner Mongolia UniversityTaiyuan University of TechnologyZhengzhou UniversityCOMSATS University IslamabadINFN, Laboratori Nazionali di FrascatiHenan Normal UniversityUniversity of Hawai’iNanjing Institute of TechnologyINFN Sezione di PerugiaInstitute of high-energy PhysicsJustus Liebig University GiessenJohannes Gutenberg University of MainzCollege of William and MaryINFN-Sezione di GenovaHelmholtz-Institut für Strahlen-und KernphysikINFN Sezione di LecceLiaoning Normal UniversityVariable Energy Cyclotron CentreUniversity of Science and Technology LiaoningG.I. Budker Institute of Nuclear PhysicsUniversity of GiessenINFN-Sezione di FerraraRuhr-University-BochumUsing events collected with the
BESIII detector at the BEPCII collider, the decay in
is observed. We determine the product branching
fraction
.
This result is consistent with the LQCD calculation
from HPQCD in 2023. By using the world-average
values of and the total decay width of
, the partial decay width is determined
to be
,
which deviates from the corresponding world-average value by .
03 Apr 2018

In practical communication and computation systems, errors occur
predominantly in adjacent positions rather than in a random manner. In this
paper, we develop a stabilizer formalism for quantum burst error correction
codes (QBECC) to combat such error patterns in the quantum regime. Our
contributions are as follows. Firstly, we derive an upper bound for the
correctable burst errors of QBECCs, the quantum Reiger bound (QRB). This bound
generalizes the quantum Singleton bound for standard quantum error correction
codes (QECCs). Secondly, we propose two constructions of QBECCs: one by
heuristic computer search and the other by concatenating two quantum tensor
product codes (QTPCs). We obtain several new QBECCs with better parameters than
existing codes with the same coding length. Moreover, some of the constructed
codes can saturate the quantum Reiger bounds. Finally, we perform numerical
experiments for our constructed codes over Markovian correlated depolarizing
quantum memory channels, and show that QBECCs indeed outperform standard QECCs
in this scenario.
03 Jan 2025
In this paper we prove a sharp global existence result for semilinear wave equations with time-dependent scale-invariant damping terms if the initial data is small. More specifically, we consider Cauchy problem of , where , and . For critical exponent which is the positive root of and conformal exponent , we establish global existence for and and are two suitable constants, then we investigate more general semilinear Tricomi equation and establish related weighted Strichartz estimates. Returning to the original wave equation, the corresponding global existence results on the small data solution can be obtained.
26 Sep 2020
As vehicles playing an increasingly important role in people's daily life,
requirements on safer and more comfortable driving experience have arisen.
Connected vehicles (CVs) can provide enabling technologies to realize these
requirements and have attracted widespread attentions from both academia and
industry. These requirements ask for a well-designed computing architecture to
support the Quality-of-Service (QoS) of CV applications. Computation offloading
techniques, such as cloud, edge, and fog computing, can help CVs process
computation-intensive and large-scale computing tasks. Additionally, different
cloud/edge/fog computing architectures are suitable for supporting different
types of CV applications with highly different QoS requirements, which
demonstrates the importance of the computing architecture design. However, most
of the existing surveys on cloud/edge/fog computing for CVs overlook the
computing architecture design, where they (i) only focus on one specific
computing architecture and (ii) lack discussions on benefits, research
challenges, and system requirements of different architectural alternatives. In
this paper, we provide a comprehensive survey on different architectural design
alternatives based on cloud/edge/fog computing for CVs. The contributions of
this paper are: (i) providing a comprehensive literature survey on existing
proposed architectural design alternatives based on cloud/edge/fog computing
for CVs, (ii) proposing a new classification of computing architectures based
on cloud/edge/fog computing for CVs: computation-aided and computation-enabled
architectures, (iii) presenting a holistic comparison among different
cloud/edge/fog computing architectures for CVs based on functional requirements
of CV systems, including advantages, disadvantages, and research challenges.
There are no more papers matching your filters at the moment.
