19 Aug 2024
Robustness, the ability of a system to maintain performance under significant and unanticipated environmental changes, is a critical property for robotic systems. While biological systems naturally exhibit robustness, there is no comprehensive understanding of how to achieve similar robustness in robotic systems. In this work, we draw inspirations from biological systems and propose a design principle that advocates active interconnections among system components to enhance robustness to environmental variations. We evaluate this design principle in a challenging long-horizon manipulation task: solving lockboxes. Our extensive simulated and real-world experiments demonstrate that we could enhance robustness against environmental changes by establishing active interconnections among system components without substantial changes in individual components. Our findings suggest that a systematic investigation of design principles in system building is necessary. It also advocates for interdisciplinary collaborations to explore and evaluate additional principles of biological robustness to advance the development of intelligent and adaptable robotic systems.

05 Apr 2024

Knowledge probing assesses to which degree a language model (LM) has
successfully learned relational knowledge during pre-training. Probing is an
inexpensive way to compare LMs of different sizes and training configurations.
However, previous approaches rely on the objective function used in
pre-training LMs and are thus applicable only to masked or causal LMs. As a
result, comparing different types of LMs becomes impossible. To address this,
we propose an approach that uses an LM's inherent ability to estimate the
log-likelihood of any given textual statement. We carefully design an
evaluation dataset of 7,731 instances (40,916 in a larger variant) from which
we produce alternative statements for each relational fact, one of which is
correct. We then evaluate whether an LM correctly assigns the highest
log-likelihood to the correct statement. Our experimental evaluation of 22
common LMs shows that our proposed framework, BEAR, can effectively probe for
knowledge across different LM types. We release the BEAR datasets and an
open-source framework that implements the probing approach to the research
community to facilitate the evaluation and development of LMs.
09 Sep 2024
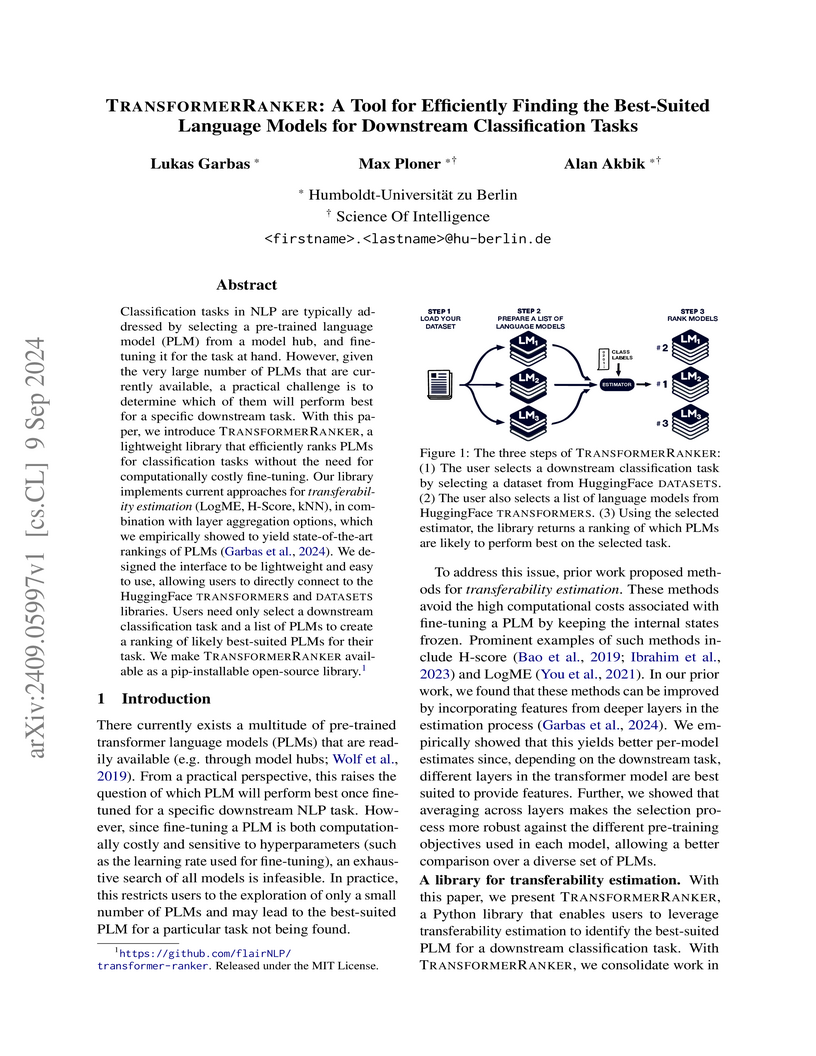
Classification tasks in NLP are typically addressed by selecting a
pre-trained language model (PLM) from a model hub, and fine-tuning it for the
task at hand. However, given the very large number of PLMs that are currently
available, a practical challenge is to determine which of them will perform
best for a specific downstream task. With this paper, we introduce
TransformerRanker, a lightweight library that efficiently ranks PLMs for
classification tasks without the need for computationally costly fine-tuning.
Our library implements current approaches for transferability estimation
(LogME, H-Score, kNN), in combination with layer aggregation options, which we
empirically showed to yield state-of-the-art rankings of PLMs (Garbas et al.,
2024). We designed the interface to be lightweight and easy to use, allowing
users to directly connect to the HuggingFace Transformers and Dataset
libraries. Users need only select a downstream classification task and a list
of PLMs to create a ranking of likely best-suited PLMs for their task. We make
TransformerRanker available as a pip-installable open-source library
this https URL
13 Feb 2025
Navigation is controlled by at least two partially dissociable, concurrently
developed systems in the brain. The cognitive map informs an organism of its
location and bearing, updated by distance-based prediction and vestibular
integration. Response-based systems, on the other hand, directly evaluate
movement decisions from immediate percepts. Here we demonstrate the sufficiency
of visual response-based decision-making in a classic open field navigation
task often assumed to require a cognitive map. Three distinct strategies emerge
to robustly navigate to a hidden goal, each conferring contextual tradeoffs, as
well as aligning with behavior observed with rodents, insects, fish, and sperm
cells. We propose reframing navigation from the bottom-up, without assuming
online access to computationally expensive top-down representations, to better
explain behavior under energetic or attentional constraints.

19 May 2022
Relation classification models are conventionally evaluated using only a
single measure, e.g., micro-F1, macro-F1 or AUC. In this work, we analyze
weighting schemes, such as micro and macro, for imbalanced datasets. We
introduce a framework for weighting schemes, where existing schemes are
extremes, and two new intermediate schemes. We show that reporting results of
different weighting schemes better highlights strengths and weaknesses of a
model.

07 Mar 2025
Researchers at Technische Universität Berlin developed a probabilistic framework for robustly estimating the kinematic structure of articulated objects by using human hand motion as a perceptual prior. This method achieved up to 195% accuracy improvement over baselines and enabled safer robot manipulation with consistently low contact forces.

11 Feb 2025
The objects we perceive guide our eye movements when observing real-world
dynamic scenes. Yet, gaze shifts and selective attention are critical for
perceiving details and refining object boundaries. Object segmentation and gaze
behavior are, however, typically treated as two independent processes. Here, we
present a computational model that simulates these processes in an
interconnected manner and allows for hypothesis-driven investigations of
distinct attentional mechanisms. Drawing on an information processing pattern
from robotics, we use a Bayesian filter to recursively segment the scene, which
also provides an uncertainty estimate for the object boundaries that we use to
guide active scene exploration. We demonstrate that this model closely
resembles observers' free viewing behavior on a dataset of dynamic real-world
scenes, measured by scanpath statistics, including foveation duration and
saccade amplitude distributions used for parameter fitting and higher-level
statistics not used for fitting. These include how object detections,
inspections, and returns are balanced and a delay of returning saccades without
an explicit implementation of such temporal inhibition of return. Extensive
simulations and ablation studies show that uncertainty promotes balanced
exploration and that semantic object cues are crucial to forming the perceptual
units used in object-based attention. Moreover, we show how our model's modular
design allows for extensions, such as incorporating saccadic momentum or
pre-saccadic attention, to further align its output with human scanpaths.

28 Aug 2024
Knowledge probing evaluates the extent to which a language model (LM) has
acquired relational knowledge during its pre-training phase. It provides a
cost-effective means of comparing LMs of different sizes and training setups
and is useful for monitoring knowledge gained or lost during continual learning
(CL). In prior work, we presented an improved knowledge probe called BEAR
(Wiland et al., 2024), which enables the comparison of LMs trained with
different pre-training objectives (causal and masked LMs) and addresses issues
of skewed distributions in previous probes to deliver a more unbiased reading
of LM knowledge. With this paper, we present LM-PUB- QUIZ, a Python framework
and leaderboard built around the BEAR probing mechanism that enables
researchers and practitioners to apply it in their work. It provides options
for standalone evaluation and direct integration into the widely-used training
pipeline of the Hugging Face TRANSFORMERS library. Further, it provides a
fine-grained analysis of different knowledge types to assist users in better
understanding the knowledge in each evaluated LM. We publicly release
LM-PUB-QUIZ as an open-source project.

14 Oct 2024
Available training data for named entity recognition (NER) often contains a significant percentage of incorrect labels for entity types and entity boundaries. Such label noise poses challenges for supervised learning and may significantly deteriorate model quality. To address this, prior work proposed various noise-robust learning approaches capable of learning from data with partially incorrect labels. These approaches are typically evaluated using simulated noise where the labels in a clean dataset are automatically corrupted. However, as we show in this paper, this leads to unrealistic noise that is far easier to handle than real noise caused by human error or semi-automatic annotation. To enable the study of the impact of various types of real noise, we introduce NoiseBench, an NER benchmark consisting of clean training data corrupted with 6 types of real noise, including expert errors, crowdsourcing errors, automatic annotation errors and LLM errors. We present an analysis that shows that real noise is significantly more challenging than simulated noise, and show that current state-of-the-art models for noise-robust learning fall far short of their theoretically achievable upper bound. We release NoiseBench to the research community.

29 Nov 2024

The ability of groups to make accurate collective decisions depends on a complex interplay of various factors, such as prior information, biases, social influence, and the structure of the interaction network. Here, we investigate a spin model that accounts for heterogeneous preferences and enables control over the non-linearity of social interactions. Building on previous results for complete graphs and regular 2D lattices, we investigate how the modification of network topology towards (sparse) random graphs can affect collective decision-making. We use two different measures of susceptibility to assess the responsiveness of the system to internal and external perturbations. In particular, we investigate how the maximum of susceptibility depends on network connectivity. Based on our findings, we discuss how collective systems might adapt to changes in environmental fluctuations by adjusting their network structure or the nature of their social interactions in order to remain in the region of maximal susceptibility.

05 Mar 2025
Given a max-plus linear system and a semimodule, the problem of computing the
maximal controlled invariant subsemimodule is still open to this day. In this
paper, we consider this problem for the specific class of fully actuated
systems and constraints in the form of precedence semimodules. The assumption
of full actuation corresponds to the existence of an input for each component
of the system state. A precedence semimodule is the set of solutions of
inequalities typically used to represent time-window constraints. We prove
that, in this setting, it is possible to (i) compute the maximal controlled
invariant subsemimodule and (ii) decide the convergence of a fixed-point
algorithm introduced by R.D. Katz in strongly polynomial time.
07 Apr 2025
Precedence constraints are inequalities used to model time dependencies. In
1958, Gallai proved that a finite system of precedence constraints admits
solutions if and only if the corresponding precedence graph does not contain
positive-weight circuits. We show that this result extends naturally to the
case of infinitely many constraints. We then analyze two specific classes of
infinite precedence graphs -- -periodic and ultimately periodic
graphs -- and prove that the existence of solutions of their related
constraints can be verified in strongly polynomial time. The obtained
algorithms find applications in P-time event graphs, which are a subclass of
P-time Petri nets able to model production systems under cyclic schedules where
tasks need to be performed within given time windows.

11 Apr 2022
Pre-trained language models (PLM) are effective components of few-shot named entity recognition (NER) approaches when augmented with continued pre-training on task-specific out-of-domain data or fine-tuning on in-domain data. However, their performance in low-resource scenarios, where such data is not available, remains an open question. We introduce an encoder evaluation framework, and use it to systematically compare the performance of state-of-the-art pre-trained representations on the task of low-resource NER. We analyze a wide range of encoders pre-trained with different strategies, model architectures, intermediate-task fine-tuning, and contrastive learning. Our experimental results across ten benchmark NER datasets in English and German show that encoder performance varies significantly, suggesting that the choice of encoder for a specific low-resource scenario needs to be carefully evaluated.
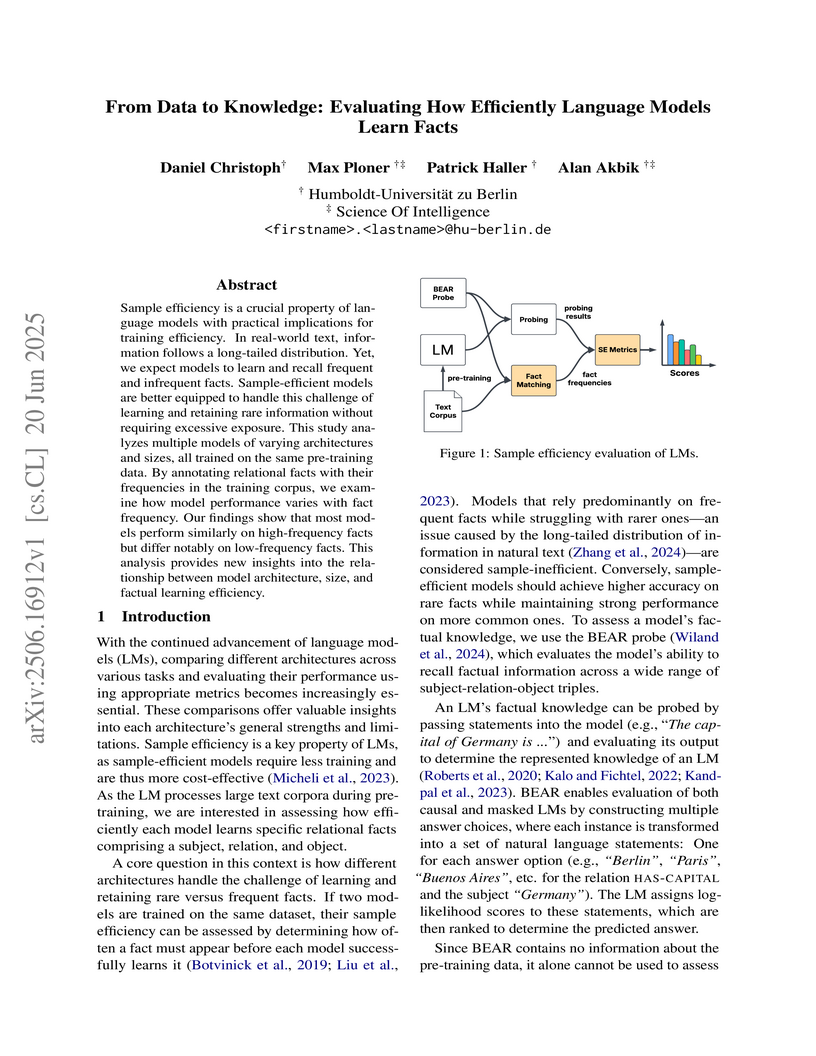
20 Jun 2025
Sample efficiency is a crucial property of language models with practical implications for training efficiency. In real-world text, information follows a long-tailed distribution. Yet, we expect models to learn and recall frequent and infrequent facts. Sample-efficient models are better equipped to handle this challenge of learning and retaining rare information without requiring excessive exposure. This study analyzes multiple models of varying architectures and sizes, all trained on the same pre-training data. By annotating relational facts with their frequencies in the training corpus, we examine how model performance varies with fact frequency. Our findings show that most models perform similarly on high-frequency facts but differ notably on low-frequency facts. This analysis provides new insights into the relationship between model architecture, size, and factual learning efficiency.
01 Sep 2023
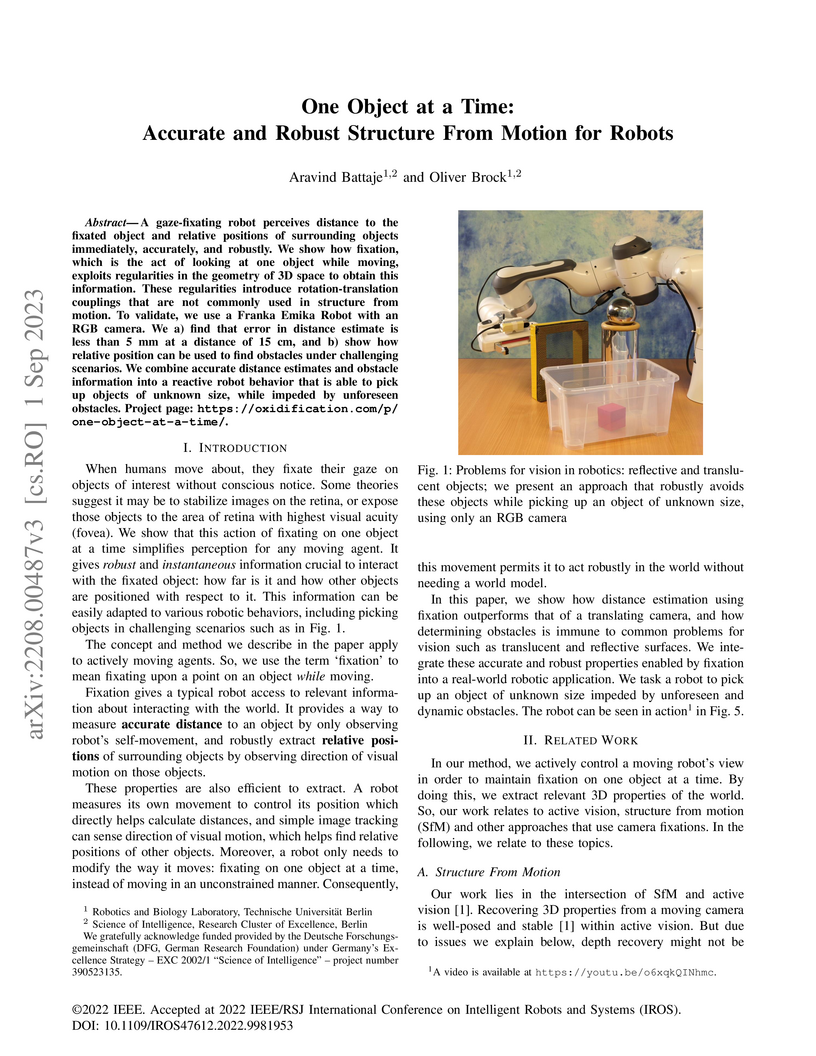
A gaze-fixating robot perceives distance to the fixated object and relative
positions of surrounding objects immediately, accurately, and robustly. We show
how fixation, which is the act of looking at one object while moving, exploits
regularities in the geometry of 3D space to obtain this information. These
regularities introduce rotation-translation couplings that are not commonly
used in structure from motion. To validate, we use a Franka Emika Robot with an
RGB camera. We a) find that error in distance estimate is less than 5 mm at a
distance of 15 cm, and b) show how relative position can be used to find
obstacles under challenging scenarios. We combine accurate distance estimates
and obstacle information into a reactive robot behavior that is able to pick up
objects of unknown size, while impeded by unforeseen obstacles. Project page:
this https URL .

13 Aug 2022


We study a model of self-propelled particles interacting with their
nearest neighbors through polar alignment. By exploring its phase space as a
function of two nondimensional parameters (alignment strength and Peclet
number ), we identify two distinct order-disorder transitions. One
is continuous, occurs at a low critical value independent of Pe, and
resembles a mean-field transition with no density-order coupling. The other is
discontinuous, depends on a combined control parameter involving and Pe,
and results from the formation of small, dense, highly persistent clusters of
particles that follow metric-like dynamics. These dense clusters form at a
critical value of the combined control parameter , with
, which appears to be valid for different alignment-based
models. Our study shows that models of active particles with metric-free
interactions can produce characteristic length-scales and self-organize into
metric-like collective states that undergo metric-like transitions.
22 Aug 2022
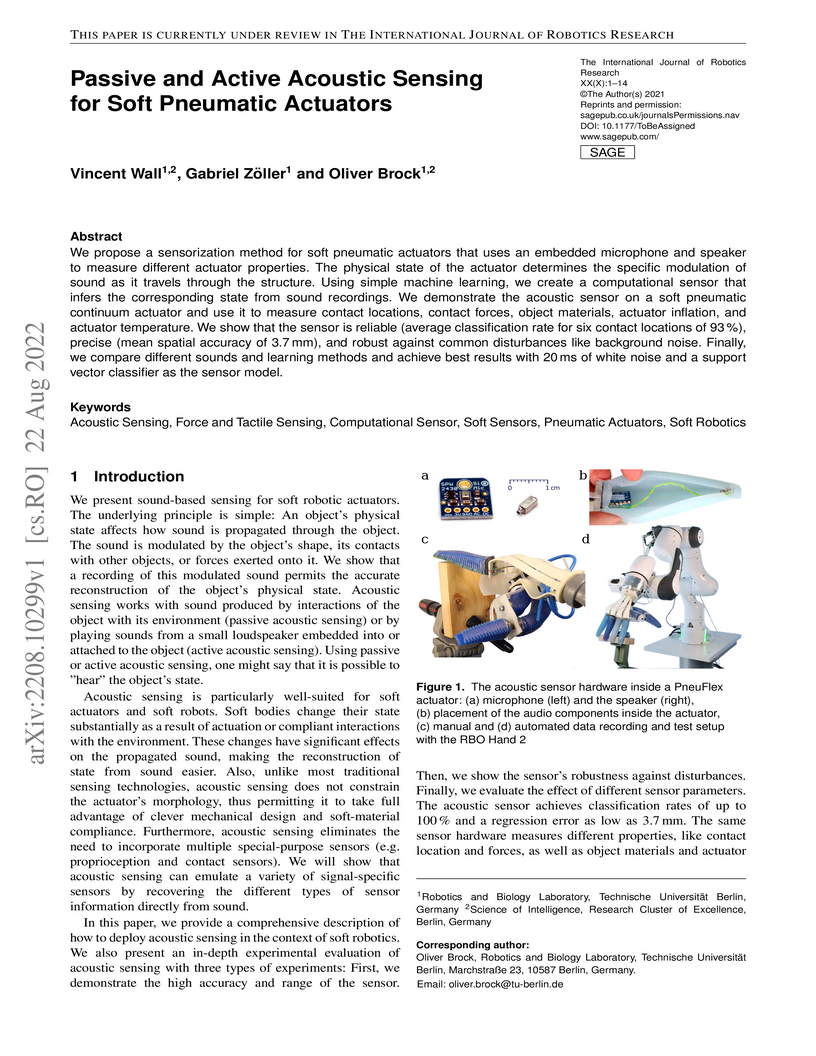
We propose a sensorization method for soft pneumatic actuators that uses an
embedded microphone and speaker to measure different actuator properties. The
physical state of the actuator determines the specific modulation of sound as
it travels through the structure. Using simple machine learning, we create a
computational sensor that infers the corresponding state from sound recordings.
We demonstrate the acoustic sensor on a soft pneumatic continuum actuator and
use it to measure contact locations, contact forces, object materials, actuator
inflation, and actuator temperature. We show that the sensor is reliable
(average classification rate for six contact locations of 93%), precise (mean
spatial accuracy of 3.7 mm), and robust against common disturbances like
background noise. Finally, we compare different sounds and learning methods and
achieve best results with 20 ms of white noise and a support vector classifier
as the sensor model.

14 Nov 2022
In this paper, an approach for active power control of individual wind
turbines is presented. State-of-the-art controllers typically employ separate
control loops for torque and pitch control. In contrast, we use a multivariable
control approach. In detail, active power control is achieved by using
reference trajectories for generator speed, generator torque, and pitch angle
such that a desired power demand is met if weather conditions allow. Then, a
linear quadratic (LQ) optimal controller is used for reference tracking. In an
OpenFAST simulation environment, the controller is compared to a
state-of-the-art approach. The simulations show a similar active power tracking
performance, while the LQ optimal controller results in lower mechanical wear.
Moreover, the presented approach exhibits good reference tracking and by
improving the reference trajectory generation further performance increases can
be expected.
26 Jan 2024
Natural and artificial collectives exhibit heterogeneities across different
dimensions, contributing to the complexity of their behavior. We investigate
the effect of two such heterogeneities on collective opinion dynamics:
heterogeneity of the quality of agents' prior information and of centrality in
the network, i.e., the number of immediate neighbors. To study these
heterogeneities, we not only consider them in our model, proposing a novel
network generator with heterogeneous centrality, but also introduce uncertainty
as an additional dimension. By quantifying the uncertainty of each agent, we
provide a mechanism for agents to adaptively weigh their individual against
social information. As uncertainties develop according to the interactions
between agents, they capture information on heterogeneities. Therefore,
uncertainty is a relevant additional observable in the study of complex
collective opinion dynamics that we use to show the bidirectional relationship
of heterogeneous centrality and information. Furthermore, we demonstrate that
uncertainty-driven adaptive weighting leads to increased accuracy and speed of
consensus, especially under heterogeneity, and provide guidelines for avoiding
performance-decreasing errors in uncertainty modeling. These opportunities for
improved performance and observability suggest the importance of uncertainty
both for the study of natural and the design of artificial heterogeneous
systems.
There are no more papers matching your filters at the moment.
