13 May 2025
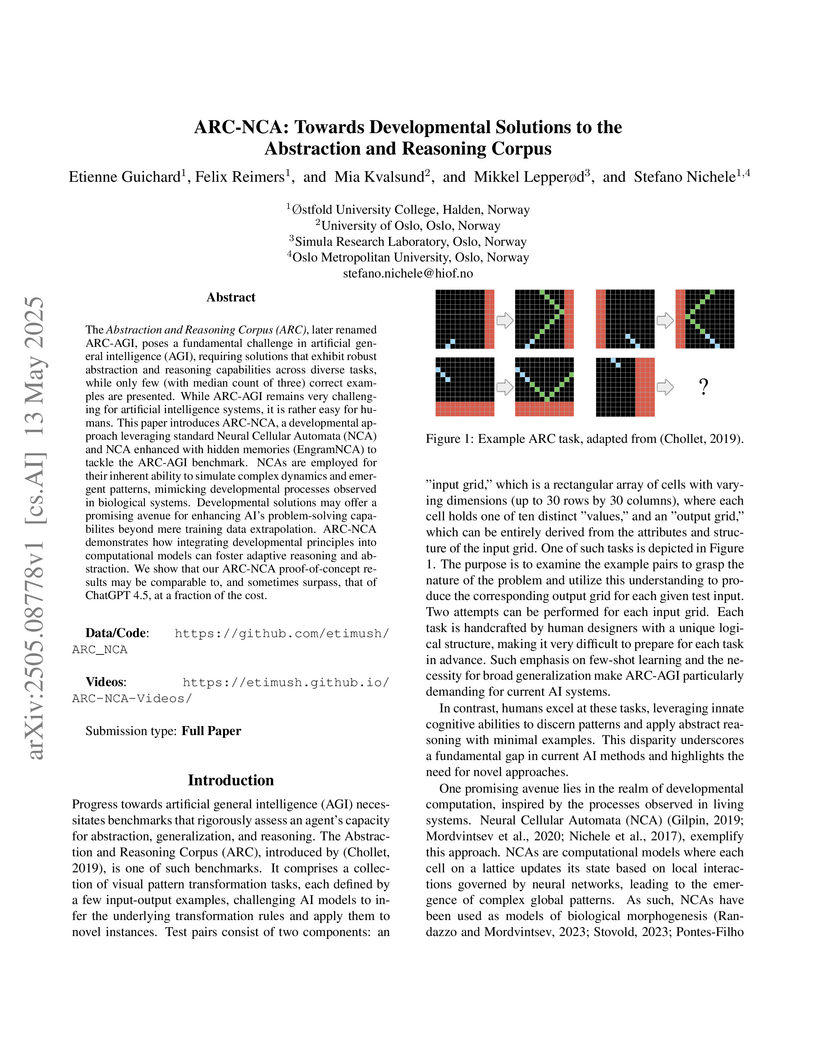
This work proposes Neural Cellular Automata as a bio-inspired, developmental approach to solving the Abstraction and Reasoning Corpus (ARC-AGI) benchmark. EngramNCA v3 achieved a 12.9% solve rate on ARC-AGI, demonstrating performance comparable to GPT-4.5 at significantly lower computational cost.

14 Oct 2025
The new SysMLv2 adds mechanisms for the built-in specification of domain-specific concepts and language extensions. This feature promises to facilitate the creation of Domain-Specific Languages (DSLs) and interfacing with existing system descriptions and technical designs. In this paper, we review these features and evaluate SysMLv2's capabilities using concrete use cases. We develop DarTwin DSL, a DSL that formalizes the existing DarTwin notation for Digital Twin (DT) evolution, through SysMLv2, thereby supposedly enabling the wide application of DarTwin's evolution templates using any SysMLv2 tool. We demonstrate DarTwin DSL, but also point out limitations in the currently available tooling of SysMLv2 in terms of graphical notation capabilities. This work contributes to the growing field of Model-Driven Engineering (MDE) for DTs and combines it with the release of SysMLv2, thus integrating a systematic approach with DT evolution management in systems engineering.

19 Jan 2024

Recent advancements in large-scale pre-training of visual-language models on
paired image-text data have demonstrated impressive generalization capabilities
for zero-shot tasks. Building on this success, efforts have been made to adapt
these image-based visual-language models, such as CLIP, for videos extending
their zero-shot capabilities to the video domain. While these adaptations have
shown promising results, they come at a significant computational cost and
struggle with effectively modeling the crucial temporal aspects inherent to the
video domain. In this study, we present EZ-CLIP, a simple and efficient
adaptation of CLIP that addresses these challenges. EZ-CLIP leverages temporal
visual prompting for seamless temporal adaptation, requiring no fundamental
alterations to the core CLIP architecture while preserving its remarkable
generalization abilities. Moreover, we introduce a novel learning objective
that guides the temporal visual prompts to focus on capturing motion, thereby
enhancing its learning capabilities from video data. We conducted extensive
experiments on five different benchmark datasets, thoroughly evaluating EZ-CLIP
for zero-shot learning and base-to-novel video action recognition, and also
demonstrating its potential for few-shot generalization.Impressively, with a
mere 5.2 million learnable parameters (as opposed to the 71.1 million in the
prior best model), EZ-CLIP can be efficiently trained on a single GPU,
outperforming existing approaches in several evaluations.

13 Oct 2021
 University of Waterloo
University of Waterloo Monash UniversityUniversity of Goettingen
Monash UniversityUniversity of Goettingen University of British ColumbiaNational University of Defense TechnologyThe Hebrew UniversityUniversity of AucklandLUT UniversityUniversity of OuluUniversity of TennesseeSharif University of TechnologyUniversity of TehranUniversit`a della Svizzera italianaKarlsruhe Institute of Technology (KIT)IBMUniversity of SaskatchewanUniversity of Maryland Baltimore CountyGuru Nanak Dev UniversityVrije Universiteit AmsterdamImam Abdulrahman Bin Faisal UniversityBrunel University LondonTrent UniversitySimula Research LaboratoryTechnical University of KosiceØstfold University CollegeEricsson Hungary Ltd.Technische Universit
at DarmstadtUniversity of W
urzburgUniversity of Missouri
Kansas CityQueens
’ University
University of British ColumbiaNational University of Defense TechnologyThe Hebrew UniversityUniversity of AucklandLUT UniversityUniversity of OuluUniversity of TennesseeSharif University of TechnologyUniversity of TehranUniversit`a della Svizzera italianaKarlsruhe Institute of Technology (KIT)IBMUniversity of SaskatchewanUniversity of Maryland Baltimore CountyGuru Nanak Dev UniversityVrije Universiteit AmsterdamImam Abdulrahman Bin Faisal UniversityBrunel University LondonTrent UniversitySimula Research LaboratoryTechnical University of KosiceØstfold University CollegeEricsson Hungary Ltd.Technische Universit
at DarmstadtUniversity of W
urzburgUniversity of Missouri
Kansas CityQueens
’ UniversityContext: Tangled commits are changes to software that address multiple
concerns at once. For researchers interested in bugs, tangled commits mean that
they actually study not only bugs, but also other concerns irrelevant for the
study of bugs.
Objective: We want to improve our understanding of the prevalence of tangling
and the types of changes that are tangled within bug fixing commits.
Methods: We use a crowd sourcing approach for manual labeling to validate
which changes contribute to bug fixes for each line in bug fixing commits. Each
line is labeled by four participants. If at least three participants agree on
the same label, we have consensus.
Results: We estimate that between 17% and 32% of all changes in bug fixing
commits modify the source code to fix the underlying problem. However, when we
only consider changes to the production code files this ratio increases to 66%
to 87%. We find that about 11% of lines are hard to label leading to active
disagreements between participants. Due to confirmed tangling and the
uncertainty in our data, we estimate that 3% to 47% of data is noisy without
manual untangling, depending on the use case.
Conclusion: Tangled commits have a high prevalence in bug fixes and can lead
to a large amount of noise in the data. Prior research indicates that this
noise may alter results. As researchers, we should be skeptics and assume that
unvalidated data is likely very noisy, until proven otherwise.

23 Sep 2025
We investigate the potential of bio-inspired evolutionary algorithms for designing quantum circuits with specific goals, focusing on two particular tasks. The first one is motivated by the ideas of Artificial Life that are used to reproduce stochastic cellular automata with given rules. We test the robustness of quantum implementations of the cellular automata for different numbers of quantum gates The second task deals with the sampling of quantum circuits that generate highly entangled quantum states, which constitute an important resource for quantum computing. In particular, an evolutionary algorithm is employed to optimize circuits with respect to a fitness function defined with the Mayer-Wallach entanglement measure. We demonstrate that, by balancing the mutation rate between exploration and exploitation, we can find entangling quantum circuits for up to five qubits. We also discuss the trade-off between the number of gates in quantum circuits and the computational costs of finding the gate arrangements leading to a strongly entangled state. Our findings provide additional insight into the trade-off between the complexity of a circuit and its performance, which is an important factor in the design of quantum circuits.

25 Sep 2020
Nowadays, the continuous improvement and automation of industrial processes
has become a key factor in many fields, and in the chemical industry, it is no
exception. This translates into a more efficient use of resources, reduced
production time, output of higher quality and reduced waste. Given the
complexity of today's industrial processes, it becomes infeasible to monitor
and optimize them without the use of information technologies and analytics. In
recent years, machine learning methods have been used to automate processes and
provide decision support. All of this, based on analyzing large amounts of data
generated in a continuous manner. In this paper, we present the results of
applying machine learning methods during a chemical sulphonation process with
the objective of automating the product quality analysis which currently is
performed manually. We used data from process parameters to train different
models including Random Forest, Neural Network and linear regression in order
to predict product quality values. Our experiments showed that it is possible
to predict those product quality values with good accuracy, thus, having the
potential to reduce time. Specifically, the best results were obtained with
Random Forest with a mean absolute error of 0.089 and a correlation of 0.978.
06 May 2021
Reservoir Computing (RC) offers a viable option to deploy AI algorithms on
low-end embedded system platforms. Liquid State Machine (LSM) is a bio-inspired
RC model that mimics the cortical microcircuits and uses spiking neural
networks (SNN) that can be directly realized on neuromorphic hardware. In this
paper, we present a novel Parallelized LSM (PLSM) architecture that
incorporates spatio-temporal read-out layer and semantic constraints on model
output. To the best of our knowledge, such a formulation has been done for the
first time in literature, and it offers a computationally lighter alternative
to traditional deep-learning models. Additionally, we also present a
comprehensive algorithm for the implementation of parallelizable SNNs and LSMs
that are GPU-compatible. We implement the PLSM model to classify
unintentional/accidental video clips, using the Oops dataset. From the
experimental results on detecting unintentional action in video, it can be
observed that our proposed model outperforms a self-supervised model and a
fully supervised traditional deep learning model. All the implemented codes can
be found at our repository
this https URL

25 Apr 2022
The discovery of complex multicellular organism development took millions of
years of evolution. The genome of such a multicellular organism guides the
development of its body from a single cell, including its control system. Our
goal is to imitate this natural process using a single neural cellular
automaton (NCA) as a genome for modular robotic agents. In the introduced
approach, called Neural Cellular Robot Substrate (NCRS), a single NCA guides
the growth of a robot and the cellular activity which controls the robot during
deployment. We also introduce three benchmark environments, which test the
ability of the approach to grow different robot morphologies. In this paper,
NCRSs are trained with covariance matrix adaptation evolution strategy
(CMA-ES), and covariance matrix adaptation MAP-Elites (CMA-ME) for quality
diversity, which we show leads to more diverse robot morphologies with higher
fitness scores. While the NCRS can solve the easier tasks from our benchmark
environments, the success rate reduces when the difficulty of the task
increases. We discuss directions for future work that may facilitate the use of
the NCRS approach for more complex domains.
23 Jan 2024
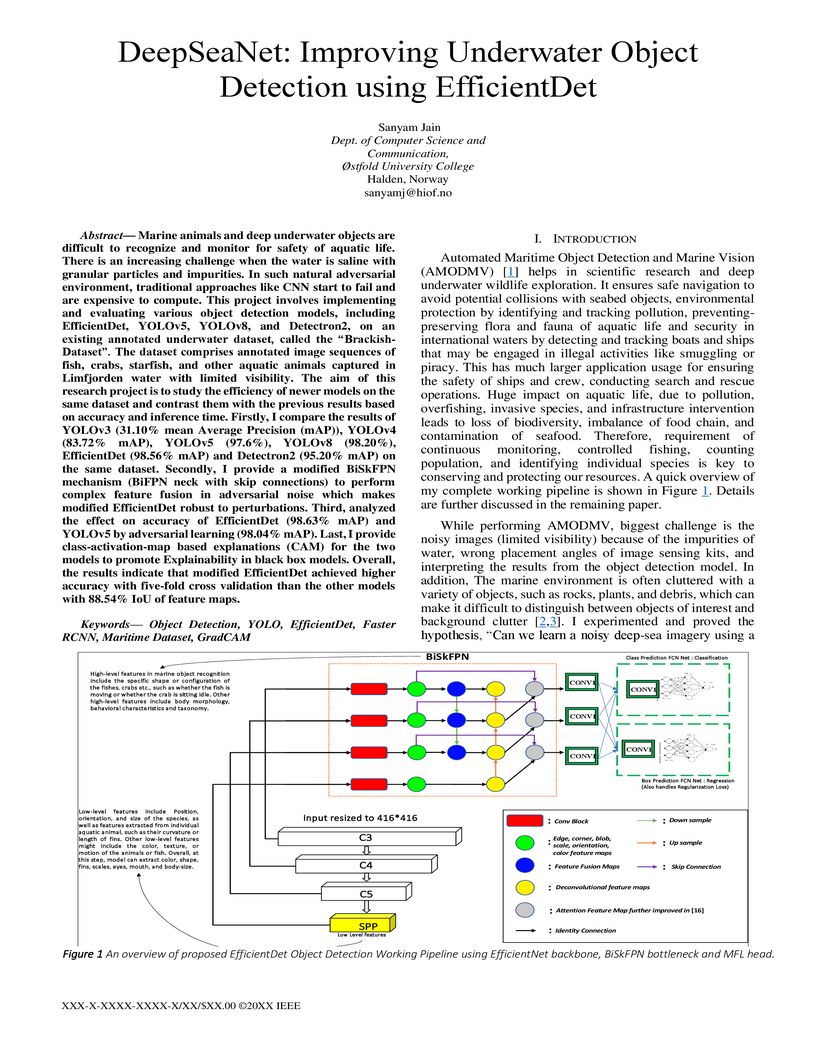
Marine animals and deep underwater objects are difficult to recognize and monitor for safety of aquatic life. There is an increasing challenge when the water is saline with granular particles and impurities. In such natural adversarial environment, traditional approaches like CNN start to fail and are expensive to compute. This project involves implementing and evaluating various object detection models, including EfficientDet, YOLOv5, YOLOv8, and Detectron2, on an existing annotated underwater dataset, called the Brackish-Dataset. The dataset comprises annotated image sequences of fish, crabs, starfish, and other aquatic animals captured in Limfjorden water with limited visibility. The aim of this research project is to study the efficiency of newer models on the same dataset and contrast them with the previous results based on accuracy and inference time. Firstly, I compare the results of YOLOv3 (31.10% mean Average Precision (mAP)), YOLOv4 (83.72% mAP), YOLOv5 (97.6%), YOLOv8 (98.20%), EfficientDet (98.56% mAP) and Detectron2 (95.20% mAP) on the same dataset. Secondly, I provide a modified BiSkFPN mechanism (BiFPN neck with skip connections) to perform complex feature fusion in adversarial noise which makes modified EfficientDet robust to perturbations. Third, analyzed the effect on accuracy of EfficientDet (98.63% mAP) and YOLOv5 by adversarial learning (98.04% mAP). Last, I provide class activation map based explanations (CAM) for the two models to promote Explainability in black box models. Overall, the results indicate that modified EfficientDet achieved higher accuracy with five-fold cross validation than the other models with 88.54% IoU of feature maps.

19 Jan 2024
This paper implements and investigates popular adversarial attacks on the YOLOv5 Object Detection algorithm. The paper explores the vulnerability of the YOLOv5 to adversarial attacks in the context of traffic and road sign detection. The paper investigates the impact of different types of attacks, including the Limited memory Broyden Fletcher Goldfarb Shanno (L-BFGS), the Fast Gradient Sign Method (FGSM) attack, the Carlini and Wagner (C&W) attack, the Basic Iterative Method (BIM) attack, the Projected Gradient Descent (PGD) attack, One Pixel Attack, and the Universal Adversarial Perturbations attack on the accuracy of YOLOv5 in detecting traffic and road signs. The results show that YOLOv5 is susceptible to these attacks, with misclassification rates increasing as the magnitude of the perturbations increases. We also explain the results using saliency maps. The findings of this paper have important implications for the safety and reliability of object detection algorithms used in traffic and transportation systems, highlighting the need for more robust and secure models to ensure their effectiveness in real-world applications.
16 Apr 2024
A primary challenge in utilizing in-vitro biological neural networks for computations is finding good encoding and decoding schemes for inputting and decoding data to and from the networks. Furthermore, identifying the optimal parameter settings for a given combination of encoding and decoding schemes adds additional complexity to this challenge. In this study we explore stimulation timing as an encoding method, i.e. we encode information as the delay between stimulation pulses and identify the bounds and acuity of stimulation timings which produce linearly separable spike responses. We also examine the optimal readout parameters for a linear decoder in the form of epoch length, time bin size and epoch offset. Our results suggest that stimulation timings between 36 and 436ms may be optimal for encoding and that different combinations of readout parameters may be optimal at different parts of the evoked spike response.
11 Jul 2023

In this thesis, we explore the use of complex systems to study learning and
adaptation in natural and artificial systems. The goal is to develop autonomous
systems that can learn without supervision, develop on their own, and become
increasingly complex over time. Complex systems are identified as a suitable
framework for understanding these phenomena due to their ability to exhibit
growth of complexity. Being able to build learning algorithms that require
limited to no supervision would enable greater flexibility and adaptability in
various applications. By understanding the fundamental principles of learning
in complex systems, we hope to advance our ability to design and implement
practical learning algorithms in the future. This thesis makes the following
key contributions: the development of a general complexity metric that we apply
to search for complex systems that exhibit growth of complexity, the
introduction of a coarse-graining method to study computations in large-scale
complex systems, and the development of a metric for learning efficiency as
well as a benchmark dataset for evaluating the speed of learning algorithms.
Our findings add substantially to our understanding of learning and adaptation
in natural and artificial systems. Moreover, our approach contributes to a
promising new direction for research in this area. We hope these findings will
inspire the development of more effective and efficient learning algorithms in
the future.
13 Aug 2025
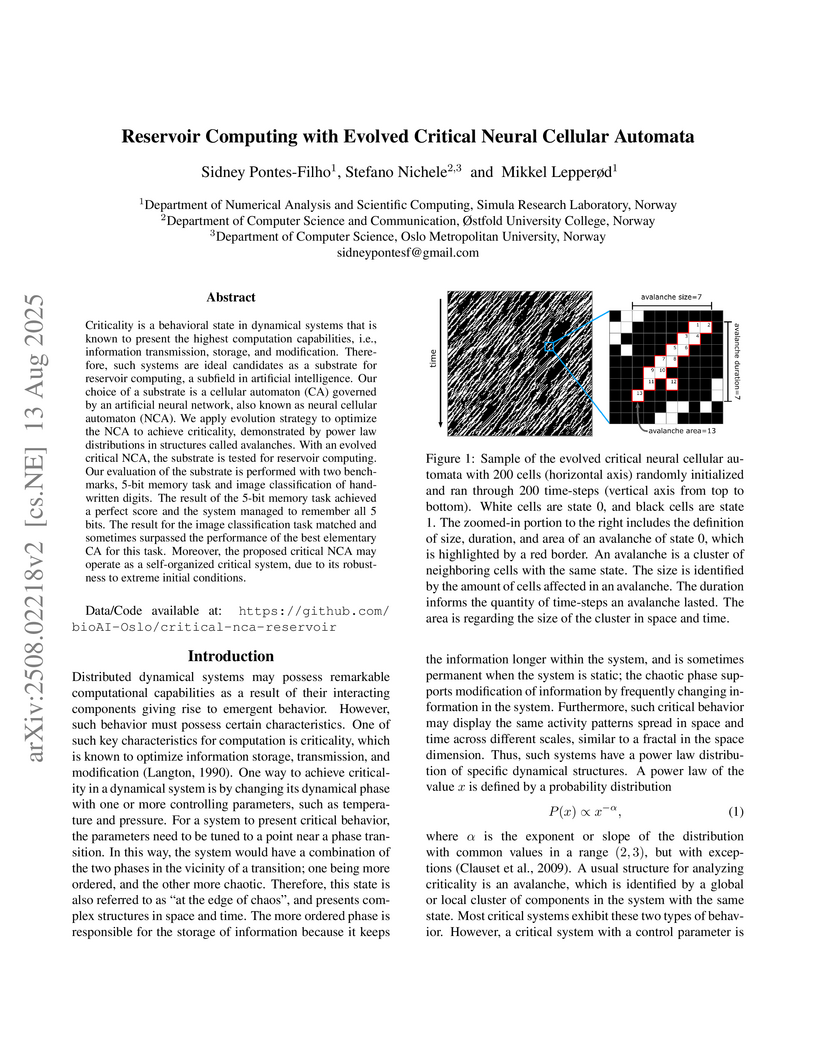
Criticality is a behavioral state in dynamical systems that is known to present the highest computation capabilities, i.e., information transmission, storage, and modification. Therefore, such systems are ideal candidates as a substrate for reservoir computing, a subfield in artificial intelligence. Our choice of a substrate is a cellular automaton (CA) governed by an artificial neural network, also known as neural cellular automaton (NCA). We apply evolution strategy to optimize the NCA to achieve criticality, demonstrated by power law distributions in structures called avalanches. With an evolved critical NCA, the substrate is tested for reservoir computing. Our evaluation of the substrate is performed with two benchmarks, 5-bit memory task and image classification of handwritten digits. The result of the 5-bit memory task achieved a perfect score and the system managed to remember all 5 bits. The result for the image classification task matched and sometimes surpassed the performance of the best elementary CA for this task. Moreover, the proposed critical NCA may operate as a self-organized critical system, due to its robustness to extreme initial conditions.

22 Jul 2020
Background: Medical device development projects must follow proper directives and regulations to be able to market and sell the end-product in their respective territories. The regulations describe requirements that seem to be opposite to efficient software development and short time-to-market. As agile approaches, like DevOps, are becoming more and more popular in software industry, a discrepancy between these modern methods and traditional regulated development has been reported. Although examples of successful adoption in this context exist, the research is sparse. Aims: The objective of this study is twofold: to review the current state of DevOps adoption in regulated medical device environment; and to propose a checklist based on that review for introducing DevOps in that context. Method: A multivocal literature review is performed and evidence is synthesized from sources published between 2015 to March of 2020 to capture the opinions of experts and community in this field. Results: Our findings reveal that adoption of DevOps in a regulated medical device environment such as ISO 13485 has its challenges, but potential benefits may outweigh those in areas such as regulatory, compliance, security, organizational and technical. Conclusion: DevOps for regulated medical device environments is a highly appealing approach as compared to traditional methods and could be particularly suited for regulated medical development. However, an organization must properly anchor a transition to DevOps in top-level management and be supportive in the initial phase utilizing professional coaching and space for iterative learning; as such an initiative is a complex organizational and technical task.

15 Jun 2018
Data analysis and monitoring of road networks in terms of reliability and
performance are valuable but hard to achieve, especially when the analytical
information has to be available to decision makers on time. The gathering and
analysis of the observable facts can be used to infer knowledge about traffic
congestion over time and gain insights into the roads safety. However, the
continuous monitoring of live traffic information produces a vast amount of
data that makes it difficult for business intelligence (BI) tools to generate
metrics and key performance indicators (KPI) in nearly real-time. In order to
overcome these limitations, we propose the application of a big-data based and
process-centric approach that integrates with operational traffic information
systems to give insights into the road network's efficiency. This paper
demonstrates how the adoption of an existent process-oriented DSS solution with
big-data support can be leveraged to monitor and analyse live traffic data on
an acceptable response time basis.

30 Jun 2022
Background: Software Engineering regularly views communication between project participants as a tool for solving various problems in software development. Objective: Formulate research questions in areas related to CHASE. Method: A day-long discussion of five participants at the in-person day of the 15th International Conference on Cooperative and Human Aspects of Software Engineering (CHASE 2022) on May 23rd 2022. Results: It is not rare in industrial SE projects that communication is not just a tool or technique to be applied but also represents a resource, which, when lacking, threatens project success. This situation might arise when a person required to make decisions (especially regarding requirements, budgets, or priorities) is often unavailable. It may be helpful to frame communication as a scarce resource to understand the key difficulty of such situations. Conclusion: We call for studies that focus on the allocation and management of scarce communication resources of stakeholders as a lens to analyze software engineering projects.

08 Jul 2018
Deep learning and deep architectures are emerging as the best machine
learning methods so far in many practical applications such as reducing the
dimensionality of data, image classification, speech recognition or object
segmentation. In fact, many leading technology companies such as Google,
Microsoft or IBM are researching and using deep architectures in their systems
to replace other traditional models. Therefore, improving the performance of
these models could make a strong impact in the area of machine learning.
However, deep learning is a very fast-growing research domain with many core
methodologies and paradigms just discovered over the last few years. This
thesis will first serve as a short summary of deep learning, which tries to
include all of the most important ideas in this research area. Based on this
knowledge, we suggested, and conducted some experiments to investigate the
possibility of improving the deep learning based on automatic programming
(ADATE). Although our experiments did produce good results, there are still
many more possibilities that we could not try due to limited time as well as
some limitations of the current ADATE version. I hope that this thesis can
promote future work on this topic, especially when the next version of ADATE
comes out. This thesis also includes a short analysis of the power of ADATE
system, which could be useful for other researchers who want to know what it is
capable of.

20 Nov 2021
AGA-GAN: Attribute Guided Attention Generative Adversarial Network with U-Net for Face Hallucination
AGA-GAN: Attribute Guided Attention Generative Adversarial Network with U-Net for Face Hallucination
The performance of facial super-resolution methods relies on their ability to
recover facial structures and salient features effectively. Even though the
convolutional neural network and generative adversarial network-based methods
deliver impressive performances on face hallucination tasks, the ability to use
attributes associated with the low-resolution images to improve performance is
unsatisfactory. In this paper, we propose an Attribute Guided Attention
Generative Adversarial Network which employs novel attribute guided attention
(AGA) modules to identify and focus the generation process on various facial
features in the image. Stacking multiple AGA modules enables the recovery of
both high and low-level facial structures. We design the discriminator to learn
discriminative features exploiting the relationship between the high-resolution
image and their corresponding facial attribute annotations. We then explore the
use of U-Net based architecture to refine existing predictions and synthesize
further facial details. Extensive experiments across several metrics show that
our AGA-GAN and AGA-GAN+U-Net framework outperforms several other cutting-edge
face hallucination state-of-the-art methods. We also demonstrate the viability
of our method when every attribute descriptor is not known and thus,
establishing its application in real-world scenarios.
20 Nov 2021
Medical image segmentation can provide detailed information for clinical
analysis which can be useful for scenarios where the detailed location of a
finding is important. Knowing the location of disease can play a vital role in
treatment and decision-making. Convolutional neural network (CNN) based
encoder-decoder techniques have advanced the performance of automated medical
image segmentation systems. Several such CNN-based methodologies utilize
techniques such as spatial- and channel-wise attention to enhance performance.
Another technique that has drawn attention in recent years is residual dense
blocks (RDBs). The successive convolutional layers in densely connected blocks
are capable of extracting diverse features with varied receptive fields and
thus, enhancing performance. However, consecutive stacked convolutional
operators may not necessarily generate features that facilitate the
identification of the target structures. In this paper, we propose a
progressive alternating attention network (PAANet). We develop progressive
alternating attention dense (PAAD) blocks, which construct a guiding attention
map (GAM) after every convolutional layer in the dense blocks using features
from all scales. The GAM allows the following layers in the dense blocks to
focus on the spatial locations relevant to the target region. Every alternate
PAAD block inverts the GAM to generate a reverse attention map which guides
ensuing layers to extract boundary and edge-related information, refining the
segmentation process. Our experiments on three different biomedical image
segmentation datasets exhibit that our PAANet achieves favourable performance
when compared to other state-of-the-art methods.
27 Jul 2022
In this work, we argue that the search for Artificial General Intelligence
(AGI) should start from a much lower level than human-level intelligence. The
circumstances of intelligent behavior in nature resulted from an organism
interacting with its surrounding environment, which could change over time and
exert pressure on the organism to allow for learning of new behaviors or
environment models. Our hypothesis is that learning occurs through interpreting
sensory feedback when an agent acts in an environment. For that to happen, a
body and a reactive environment are needed. We evaluate a method to evolve a
biologically-inspired artificial neural network that learns from environment
reactions named Neuroevolution of Artificial General Intelligence (NAGI), a
framework for low-level AGI. This method allows the evolutionary
complexification of a randomly-initialized spiking neural network with adaptive
synapses, which controls agents instantiated in mutable environments. Such a
configuration allows us to benchmark the adaptivity and generality of the
controllers. The chosen tasks in the mutable environments are food foraging,
emulation of logic gates, and cart-pole balancing. The three tasks are
successfully solved with rather small network topologies and therefore it opens
up the possibility of experimenting with more complex tasks and scenarios where
curriculum learning is beneficial.
There are no more papers matching your filters at the moment.
