
06 Jun 2024

The widespread practice of fine-tuning large language models (LLMs) on
domain-specific data faces two major challenges in memory and privacy. First,
as the size of LLMs continues to grow, the memory demands of gradient-based
training methods via backpropagation become prohibitively high. Second, given
the tendency of LLMs to memorize training data, it is important to protect
potentially sensitive information in the fine-tuning data from being
regurgitated. Zeroth-order methods, which rely solely on forward passes,
substantially reduce memory consumption during training. However, directly
combining them with standard differentially private gradient descent suffers
more as model size grows. To bridge this gap, we introduce DPZero, a novel
private zeroth-order algorithm with nearly dimension-independent rates. The
memory efficiency of DPZero is demonstrated in privately fine-tuning RoBERTa
and OPT on several downstream tasks. Our code is available at
https://github.com/Liang137/DPZero.

02 Jun 2021
While current monocular 3D face reconstruction methods can recover fine geometric details, they suffer several limitations. Some methods produce faces that cannot be realistically animated because they do not model how wrinkles vary with expression. Other methods are trained on high-quality face scans and do not generalize well to in-the-wild images. We present the first approach that regresses 3D face shape and animatable details that are specific to an individual but change with expression. Our model, DECA (Detailed Expression Capture and Animation), is trained to robustly produce a UV displacement map from a low-dimensional latent representation that consists of person-specific detail parameters and generic expression parameters, while a regressor is trained to predict detail, shape, albedo, expression, pose and illumination parameters from a single image. To enable this, we introduce a novel detail-consistency loss that disentangles person-specific details from expression-dependent wrinkles. This disentanglement allows us to synthesize realistic person-specific wrinkles by controlling expression parameters while keeping person-specific details unchanged. DECA is learned from in-the-wild images with no paired 3D supervision and achieves state-of-the-art shape reconstruction accuracy on two benchmarks. Qualitative results on in-the-wild data demonstrate DECA's robustness and its ability to disentangle identity- and expression-dependent details enabling animation of reconstructed faces. The model and code are publicly available at this https URL.

07 Oct 2021



ATISS (Autoregressive Transformers for Indoor Scene Synthesis) generates realistic 3D indoor scenes by formulating the task as an unordered set prediction problem, leveraging transformer architectures for permutation equivariance. The method produces more realistic and diverse scenes than prior approaches and enables interactive applications such as scene completion and object suggestion.

10 Oct 2025

Test-time scaling aims to improve language model performance by leveraging additional compute during inference. Many works have empirically studied techniques such as Best-of-N (BoN) and Rejection Sampling (RS) that make use of a verifier to enable test-time scaling. However, to date there is little theoretical understanding of how verifier imperfection affects performance -- a gap we address in this work. Specifically, we prove that the instance-level accuracy of these methods is precisely characterized by the geometry of the verifier's ROC curve. Our theory has two important takeaways, confirmed by experiments with Qwen and LLama models on GSM8K and MATH500. First, RS outperforms BoN for fixed compute, while both methods converge to the same accuracy in the infinite-compute limit. Second, it is generally impossible to predict the high-compute performance of either method based on observations in the low-compute regime.

08 Oct 2020
Researchers from MPI-IS, ETH Zürich, and Saarland University reformulate algorithmic recourse by grounding it in causal interventions rather than mere counterfactual explanations. Their "Recourse through Minimal Interventions" (MINT) framework, which utilizes Structural Causal Models, provides demonstrably more efficient and actionable recommendations, reducing intervention costs by up to 65% compared to prior CFE-based methods.

23 Oct 2024
We study how well machine learning models trained on causal features generalize across domains. We consider 16 prediction tasks on tabular datasets covering applications in health, employment, education, social benefits, and politics. Each dataset comes with multiple domains, allowing us to test how well a model trained in one domain performs in another. For each prediction task, we select features that have a causal influence on the target of prediction. Our goal is to test the hypothesis that models trained on causal features generalize better across domains. Without exception, we find that predictors using all available features, regardless of causality, have better in-domain and out-of-domain accuracy than predictors using causal features. Moreover, even the absolute drop in accuracy from one domain to the other is no better for causal predictors than for models that use all features. In addition, we show that recent causal machine learning methods for domain generalization do not perform better in our evaluation than standard predictors trained on the set of causal features. Likewise, causal discovery algorithms either fail to run or select causal variables that perform no better than our selection. Extensive robustness checks confirm that our findings are stable under variable misclassification.
02 Jul 2024
How can agents learn internal models that veridically represent interactions with the real world is a largely open question. As machine learning is moving towards representations containing not just observational but also interventional knowledge, we study this problem using tools from representation learning and group theory. We propose methods enabling an agent acting upon the world to learn internal representations of sensory information that are consistent with actions that modify it. We use an autoencoder equipped with a group representation acting on its latent space, trained using an equivariance-derived loss in order to enforce a suitable homomorphism property on the group representation. In contrast to existing work, our approach does not require prior knowledge of the group and does not restrict the set of actions the agent can perform. We motivate our method theoretically, and show empirically that it can learn a group representation of the actions, thereby capturing the structure of the set of transformations applied to the environment. We further show that this allows agents to predict the effect of sequences of future actions with improved accuracy.

23 Oct 2020

Recent work has discussed the limitations of counterfactual explanations to recommend actions for algorithmic recourse, and argued for the need of taking causal relationships between features into consideration. Unfortunately, in practice, the true underlying structural causal model is generally unknown. In this work, we first show that it is impossible to guarantee recourse without access to the true structural equations. To address this limitation, we propose two probabilistic approaches to select optimal actions that achieve recourse with high probability given limited causal knowledge (e.g., only the causal graph). The first captures uncertainty over structural equations under additive Gaussian noise, and uses Bayesian model averaging to estimate the counterfactual distribution. The second removes any assumptions on the structural equations by instead computing the average effect of recourse actions on individuals similar to the person who seeks recourse, leading to a novel subpopulation-based interventional notion of recourse. We then derive a gradient-based procedure for selecting optimal recourse actions, and empirically show that the proposed approaches lead to more reliable recommendations under imperfect causal knowledge than non-probabilistic baselines.

04 Nov 2022
Traditional 3D morphable face models (3DMMs) provide fine-grained control
over expression but cannot easily capture geometric and appearance details.
Neural volumetric representations approach photorealism but are hard to animate
and do not generalize well to unseen expressions. To tackle this problem, we
propose IMavatar (Implicit Morphable avatar), a novel method for learning
implicit head avatars from monocular videos. Inspired by the fine-grained
control mechanisms afforded by conventional 3DMMs, we represent the expression-
and pose- related deformations via learned blendshapes and skinning fields.
These attributes are pose-independent and can be used to morph the canonical
geometry and texture fields given novel expression and pose parameters. We
employ ray marching and iterative root-finding to locate the canonical surface
intersection for each pixel. A key contribution is our novel analytical
gradient formulation that enables end-to-end training of IMavatars from videos.
We show quantitatively and qualitatively that our method improves geometry and
covers a more complete expression space compared to state-of-the-art methods.

22 Jan 2024
Biomimetic, dexterous robotic hands have the potential to replicate much of the tasks that a human can do, and to achieve status as a general manipulation platform. Recent advances in reinforcement learning (RL) frameworks have achieved remarkable performance in quadrupedal locomotion and dexterous manipulation tasks. Combined with GPU-based highly parallelized simulations capable of simulating thousands of robots in parallel, RL-based controllers have become more scalable and approachable. However, in order to bring RL-trained policies to the real world, we require training frameworks that output policies that can work with physical actuators and sensors as well as a hardware platform that can be manufactured with accessible materials yet is robust enough to run interactive policies. This work introduces the biomimetic tendon-driven Faive Hand and its system architecture, which uses tendon-driven rolling contact joints to achieve a 3D printable, robust high-DoF hand design. We model each element of the hand and integrate it into a GPU simulation environment to train a policy with RL, and achieve zero-shot transfer of a dexterous in-hand sphere rotation skill to the physical robot hand.

22 Apr 2019

This paper presents a learning-based method for 3D shape parsing that utilizes superquadric primitives, demonstrating enhanced expressiveness compared to cuboids. It introduces an analytical solution for the Chamfer distance, enabling more efficient and stable training for unsupervised part decomposition.

28 Mar 2024
Online feedback optimization is a controller design paradigm for optimizing the steady-state behavior of a dynamical system. It employs an optimization algorithm as a dynamic feedback controller and utilizes real-time measurements to bypass knowing exact plant dynamics and disturbances. Different from existing centralized settings, we present a fully decentralized feedback optimization controller for networked systems to lift the communication burden and improve scalability. We approximate the overall input-output sensitivity matrix through its diagonal elements, which capture local model information. For the closed-loop behavior, we characterize the stability and bound the sub-optimality due to decentralization. We prove that the proposed decentralized controller yields solutions that correspond to the Nash equilibria of a non-cooperative game.
09 Jan 2024


Algorithmic reproducibility measures the deviation in outputs of machine
learning algorithms upon minor changes in the training process. Previous work
suggests that first-order methods would need to trade-off convergence rate
(gradient complexity) for better reproducibility. In this work, we challenge
this perception and demonstrate that both optimal reproducibility and
near-optimal convergence guarantees can be achieved for smooth convex
minimization and smooth convex-concave minimax problems under various
error-prone oracle settings. Particularly, given the inexact initialization
oracle, our regularization-based algorithms achieve the best of both worlds -
optimal reproducibility and near-optimal gradient complexity - for minimization
and minimax optimization. With the inexact gradient oracle, the near-optimal
guarantees also hold for minimax optimization. Additionally, with the
stochastic gradient oracle, we show that stochastic gradient descent ascent is
optimal in terms of both reproducibility and gradient complexity. We believe
our results contribute to an enhanced understanding of the
reproducibility-convergence trade-off in the context of convex optimization.
19 Oct 2022
We study differentially private (DP) algorithms for smooth stochastic minimax optimization, with stochastic minimization as a byproduct. The holy grail of these settings is to guarantee the optimal trade-off between the privacy and the excess population loss, using an algorithm with a linear time-complexity in the number of training samples. We provide a general framework for solving differentially private stochastic minimax optimization (DP-SMO) problems, which enables the practitioners to bring their own base optimization algorithm and use it as a black-box to obtain the near-optimal privacy-loss trade-off. Our framework is inspired from the recently proposed Phased-ERM method [22] for nonsmooth differentially private stochastic convex optimization (DP-SCO), which exploits the stability of the empirical risk minimization (ERM) for the privacy guarantee. The flexibility of our approach enables us to sidestep the requirement that the base algorithm needs to have bounded sensitivity, and allows the use of sophisticated variance-reduced accelerated methods to achieve near-linear time-complexity. To the best of our knowledge, these are the first near-linear time algorithms with near-optimal guarantees on the population duality gap for smooth DP-SMO, when the objective is (strongly-)convex--(strongly-)concave. Additionally, based on our flexible framework, we enrich the family of near-linear time algorithms for smooth DP-SCO with the near-optimal privacy-loss trade-off.
23 Nov 2021
Although neural networks are powerful function approximators, the underlying
modelling assumptions ultimately define the likelihood and thus the hypothesis
class they are parameterizing. In classification, these assumptions are minimal
as the commonly employed softmax is capable of representing any categorical
distribution. In regression, however, restrictive assumptions on the type of
continuous distribution to be realized are typically placed, like the dominant
choice of training via mean-squared error and its underlying Gaussianity
assumption. Recently, modelling advances allow to be agnostic to the type of
continuous distribution to be modelled, granting regression the flexibility of
classification models. While past studies stress the benefit of such flexible
regression models in terms of performance, here we study the effect of the
model choice on uncertainty estimation. We highlight that under model
misspecification, aleatoric uncertainty is not properly captured, and that a
Bayesian treatment of a misspecified model leads to unreliable epistemic
uncertainty estimates. Overall, our study provides an overview on how modelling
choices in regression may influence uncertainty estimation and thus any
downstream decision making process.
16 Nov 2019
 ETH Zurich
ETH Zurich University of Illinois at Urbana-Champaign
University of Illinois at Urbana-Champaign National University of SingaporeNational University of Singapore (NUS)Agency for Science Technology and Research (A*STAR)Institute for Infocomm ResearchAdvanced Digital Sciences CenterMax Planck ETH Center for Learning SystemsAdvanced Digital Sciences Center (ADSC)Advanced Digital Sciences Center (ADSC), University of Illinois at Urbana-Champaign
National University of SingaporeNational University of Singapore (NUS)Agency for Science Technology and Research (A*STAR)Institute for Infocomm ResearchAdvanced Digital Sciences CenterMax Planck ETH Center for Learning SystemsAdvanced Digital Sciences Center (ADSC)Advanced Digital Sciences Center (ADSC), University of Illinois at Urbana-ChampaignApparent personality and emotion analysis are both central to affective computing. Existing works solve them individually. In this paper we investigate if such high-level affect traits and their relationship can be jointly learned from face images in the wild. To this end, we introduce PersEmoN, an end-to-end trainable and deep Siamese-like network. It consists of two convolutional network branches, one for emotion and the other for apparent personality. Both networks share their bottom feature extraction module and are optimized within a multi-task learning framework. Emotion and personality networks are dedicated to their own annotated dataset. Furthermore, an adversarial-like loss function is employed to promote representation coherence among heterogeneous dataset sources. Based on this, we also explore the emotion-to-apparent-personality relationship. Extensive experiments demonstrate the effectiveness of PersEmoN.
13 Oct 2022

Data augmentation is commonly applied to improve performance of deep learning by enforcing the knowledge that certain transformations on the input preserve the output. Currently, the data augmentation parameters are chosen by human effort and costly cross-validation, which makes it cumbersome to apply to new datasets. We develop a convenient gradient-based method for selecting the data augmentation without validation data during training of a deep neural network. Our approach relies on phrasing data augmentation as an invariance in the prior distribution on the functions of a neural network, which allows us to learn it using Bayesian model selection. This has been shown to work in Gaussian processes, but not yet for deep neural networks. We propose a differentiable Kronecker-factored Laplace approximation to the marginal likelihood as our objective, which can be optimised without human supervision or validation data. We show that our method can successfully recover invariances present in the data, and that this improves generalisation and data efficiency on image datasets.

30 Mar 2023
We present Depth-aware Image-based NEural Radiance fields (DINER). Given a
sparse set of RGB input views, we predict depth and feature maps to guide the
reconstruction of a volumetric scene representation that allows us to render 3D
objects under novel views. Specifically, we propose novel techniques to
incorporate depth information into feature fusion and efficient scene sampling.
In comparison to the previous state of the art, DINER achieves higher synthesis
quality and can process input views with greater disparity. This allows us to
capture scenes more completely without changing capturing hardware requirements
and ultimately enables larger viewpoint changes during novel view synthesis. We
evaluate our method by synthesizing novel views, both for human heads and for
general objects, and observe significantly improved qualitative results and
increased perceptual metrics compared to the previous state of the art. The
code is publicly available for research purposes.
14 Sep 2023

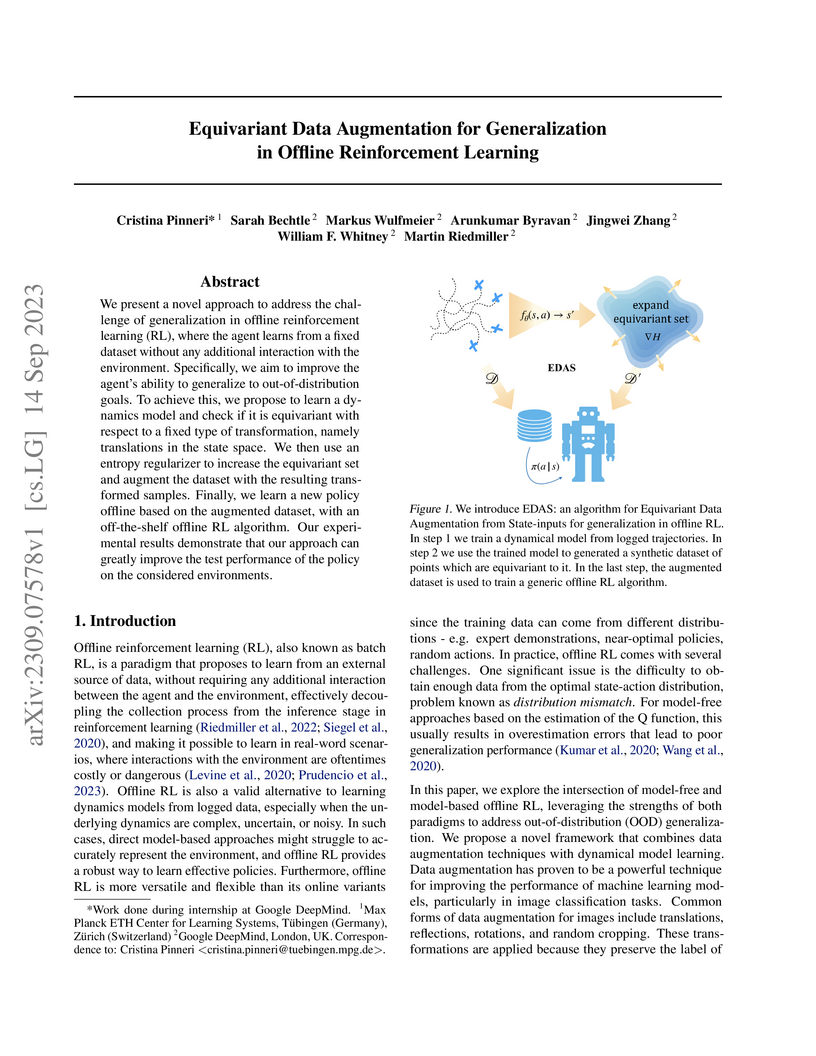
We present a novel approach to address the challenge of generalization in offline reinforcement learning (RL), where the agent learns from a fixed dataset without any additional interaction with the environment. Specifically, we aim to improve the agent's ability to generalize to out-of-distribution goals. To achieve this, we propose to learn a dynamics model and check if it is equivariant with respect to a fixed type of transformation, namely translations in the state space. We then use an entropy regularizer to increase the equivariant set and augment the dataset with the resulting transformed samples. Finally, we learn a new policy offline based on the augmented dataset, with an off-the-shelf offline RL algorithm. Our experimental results demonstrate that our approach can greatly improve the test performance of the policy on the considered environments.

06 Sep 2019
In the last few years, machine learning techniques, in particular
convolutional neural networks, have been investigated as a method to replace or
complement traditional matched filtering techniques that are used to detect the
gravitational-wave signature of merging black holes. However, to date, these
methods have not yet been successfully applied to the analysis of long
stretches of data recorded by the Advanced LIGO and Virgo gravitational-wave
observatories. In this work, we critically examine the use of convolutional
neural networks as a tool to search for merging black holes. We identify the
strengths and limitations of this approach, highlight some common pitfalls in
translating between machine learning and gravitational-wave astronomy, and
discuss the interdisciplinary challenges. In particular, we explain in detail
why convolutional neural networks alone cannot be used to claim a statistically
significant gravitational-wave detection. However, we demonstrate how they can
still be used to rapidly flag the times of potential signals in the data for a
more detailed follow-up. Our convolutional neural network architecture as well
as the proposed performance metrics are better suited for this task than a
standard binary classifications scheme. A detailed evaluation of our approach
on Advanced LIGO data demonstrates the potential of such systems as trigger
generators. Finally, we sound a note of caution by constructing adversarial
examples, which showcase interesting "failure modes" of our model, where inputs
with no visible resemblance to real gravitational-wave signals are identified
as such by the network with high confidence.
There are no more papers matching your filters at the moment.
