Ask or search anything...


 Google DeepMind
Google DeepMind University of Illinois at Urbana-Champaign
University of Illinois at Urbana-ChampaignThe OpenX-Embodiment Collaboration released the Open X-Embodiment (OXE) Dataset, a consolidated collection of over 1 million real robot trajectories from 22 embodiments. This work demonstrates that large RT-X models trained on such diverse data achieve positive transfer and emergent skills across different robot platforms.
View blog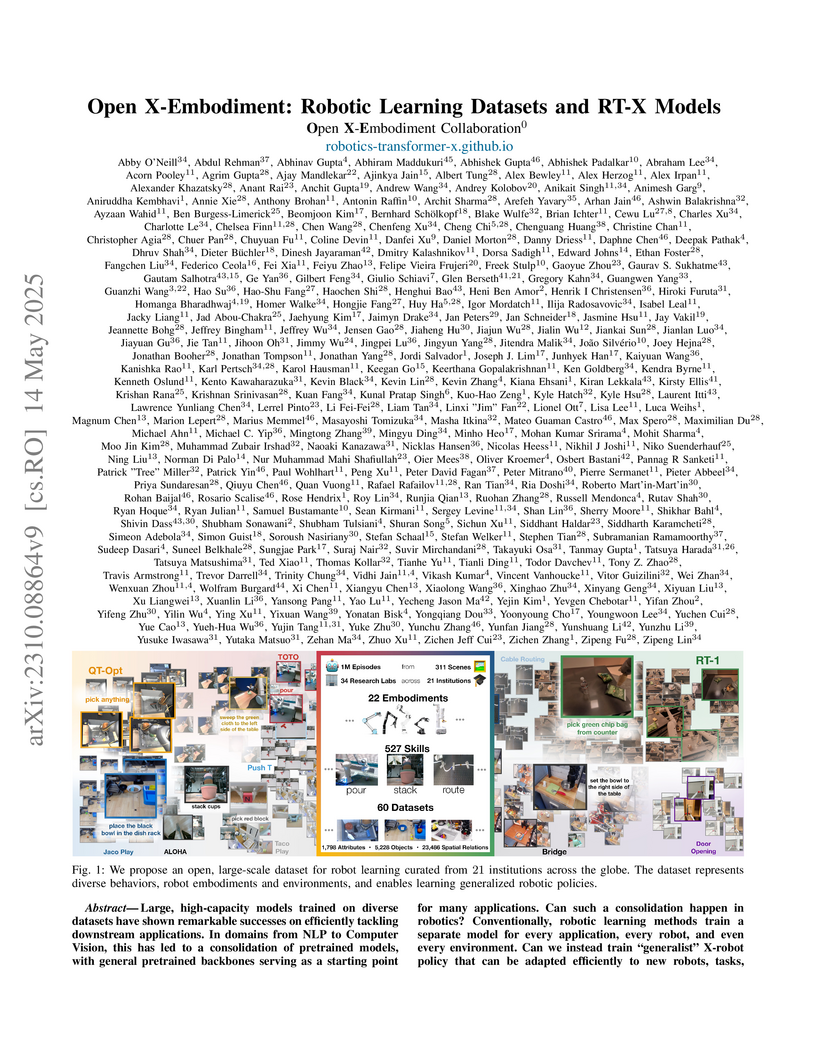

 Imperial College London
Imperial College LondonOASIS presents an open agent social interaction simulator capable of scaling to one million LLM-based agents, designed to mimic real-world social media platforms. The platform successfully replicates and investigates complex social phenomena like information propagation, group polarization, and herd effects, providing a testbed for understanding emergent behaviors at unprecedented scales.
View blog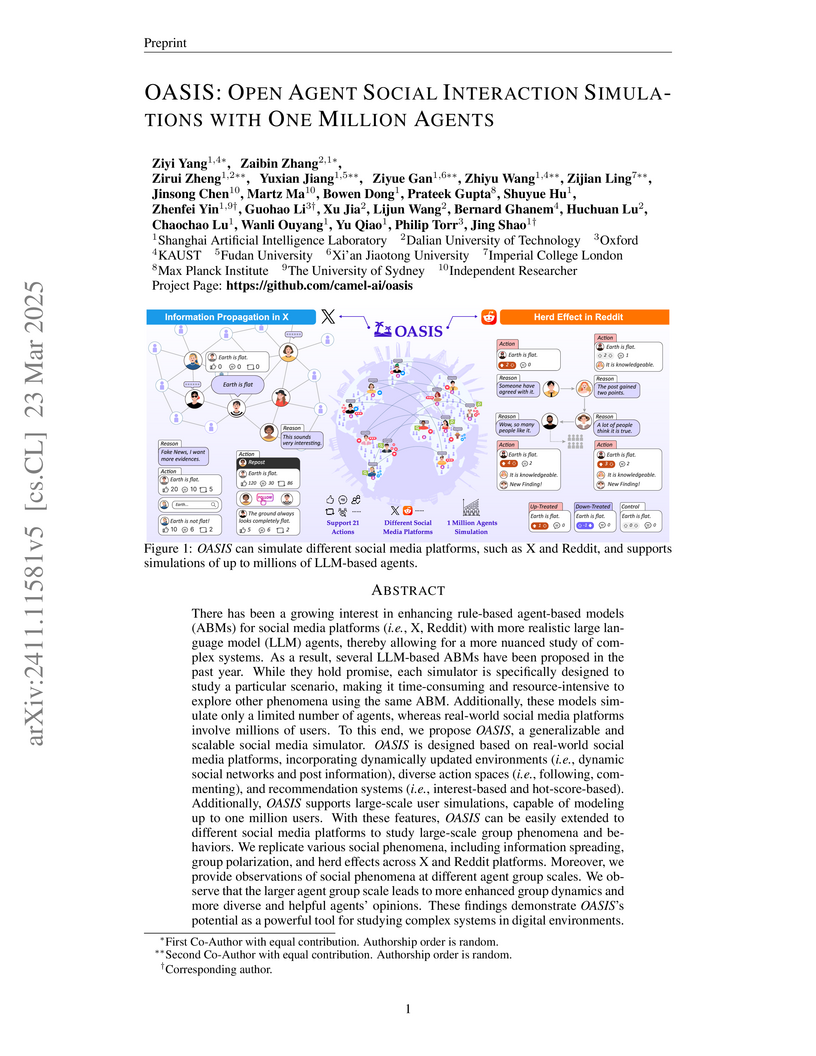
 Stanford University
Stanford University ETH Zürich
ETH Zürich
 University of Washington
University of Washington Carnegie Mellon University
Carnegie Mellon UniversityThe KATRIN experiment delivers the most precise direct measurement of the effective electron antineutrino mass, establishing an upper limit of 0.45 eV at 90% confidence level based on 259 days of data. This result nearly doubles the precision of KATRIN's previous bound and provides a world-leading direct constraint on neutrino mass.
View blog
 University of Cambridge
University of Cambridge
 University of Michigan
University of Michigan The University of Hong Kong
The University of Hong Kong

 Texas A&M University
Texas A&M University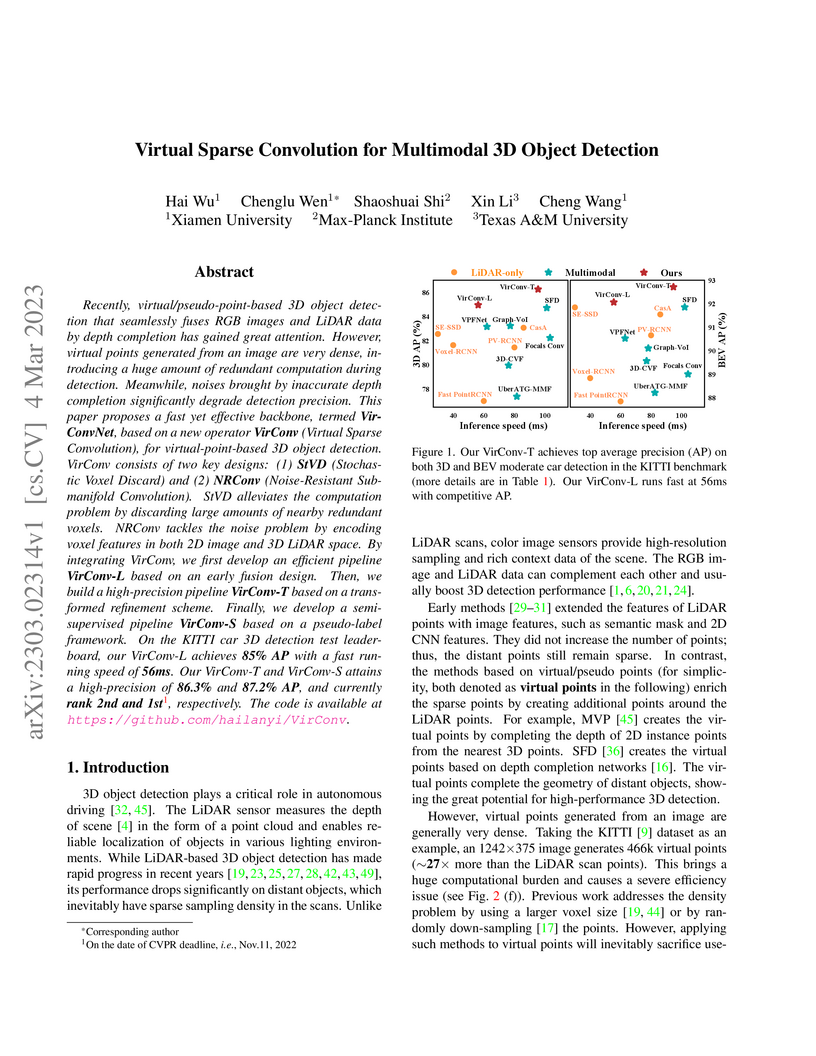
Researchers from Max Planck Institute and ETH Zürich introduce the task of logical fallacy detection in natural language, constructing two novel datasets and proposing a structure-aware classification model. Their model achieved a 5.46% F1 score improvement over the best baseline on the LOGIC dataset and maintained a 5.66% F1 improvement on the challenging LOGICCLIMATE dataset for climate change claims, indicating enhanced logical reasoning.
View blog
 Boston University
Boston University Columbia University
Columbia UniversitySignX introduces a foundation model for sign language recognition that directly processes raw video and heterogeneous pose data, translating sign language into text. The model integrates diverse pose inputs from multiple estimation models into a unified representation, achieving high BLEU-1 scores and lower Word Error Rate on the ASLLRP SignStream®3 Corpus.
View blog

 Tel Aviv University
Tel Aviv University University of California, Irvine
University of California, Irvine
 Harvard University
Harvard University
 UC Berkeley
UC BerkeleyTemporal Difference Models (TDMs) bridge model-free and model-based deep reinforcement learning by introducing a family of goal-conditioned value functions with a variable planning horizon. This approach achieves the sample efficiency of model-based methods while retaining the high asymptotic performance of model-free algorithms across various continuous control tasks, including real-world robotic manipulation.
View blog