
24 Sep 2024

This article introduces the Clarke transform and Clarke coordinates, which present a solution to the disengagement of an arbitrary number of coupled displacement actuation of continuum and soft robots. The Clarke transform utilizes the generalized Clarke transformation and its inverse to reduce any number of joint values to a two-dimensional space without sacrificing any significant information. This space is the manifold of the joint space and is described by two orthogonal Clarke coordinates. Application to kinematics, sampling, and control are presented. By deriving the solution to the previously unknown forward robot-dependent mapping for an arbitrary number of joints, the forward and inverse kinematics formulations are branchless, closed-form, and singular-free. Sampling is used as a proxy for gauging the performance implications for various methods and frameworks, leading to a branchless, closed-form, and vectorizable sampling method with a 100 percent success rate and the possibility to shape desired distributions. Due to the utilization of the manifold, the fairly simple constraint-informed, two-dimensional, and linear controller always provides feasible control outputs. On top of that, the relations to improved representations in continuum and soft robotics are established, where the Clarke coordinates are their generalizations.
The Clarke transform offers valuable geometric insights and paves the way for developing approaches directly on the two-dimensional manifold within the high-dimensional joint space, ensuring compliance with the constraint. While being an easy-to-construct linear map, the proposed Clarke transform is mathematically consistent, physically meaningful, as well as interpretable and contributes to the unification of frameworks across continuum and soft robots.

19 Jul 2022
We present FEAR, a family of fast, efficient, accurate, and robust Siamese
visual trackers. We present a novel and efficient way to benefit from
dual-template representation for object model adaption, which incorporates
temporal information with only a single learnable parameter. We further improve
the tracker architecture with a pixel-wise fusion block. By plugging-in
sophisticated backbones with the abovementioned modules, FEAR-M and FEAR-L
trackers surpass most Siamese trackers on several academic benchmarks in both
accuracy and efficiency. Employed with the lightweight backbone, the optimized
version FEAR-XS offers more than 10 times faster tracking than current Siamese
trackers while maintaining near state-of-the-art results. FEAR-XS tracker is
2.4x smaller and 4.3x faster than LightTrack with superior accuracy. In
addition, we expand the definition of the model efficiency by introducing FEAR
benchmark that assesses energy consumption and execution speed. We show that
energy consumption is a limiting factor for trackers on mobile devices. Source
code, pretrained models, and evaluation protocol are available at
this https URL

11 Apr 2022

We present DAD-3DHeads, a dense and diverse large-scale dataset, and a robust model for 3D Dense Head Alignment in the wild. It contains annotations of over 3.5K landmarks that accurately represent 3D head shape compared to the ground-truth scans. The data-driven model, DAD-3DNet, trained on our dataset, learns shape, expression, and pose parameters, and performs 3D reconstruction of a FLAME mesh. The model also incorporates a landmark prediction branch to take advantage of rich supervision and co-training of multiple related tasks. Experimentally, DAD-3DNet outperforms or is comparable to the state-of-the-art models in (i) 3D Head Pose Estimation on AFLW2000-3D and BIWI, (ii) 3D Face Shape Reconstruction on NoW and Feng, and (iii) 3D Dense Head Alignment and 3D Landmarks Estimation on DAD-3DHeads dataset. Finally, the diversity of DAD-3DHeads in camera angles, facial expressions, and occlusions enables a benchmark to study in-the-wild generalization and robustness to distribution shifts. The dataset webpage is this https URL.
07 Jun 2022


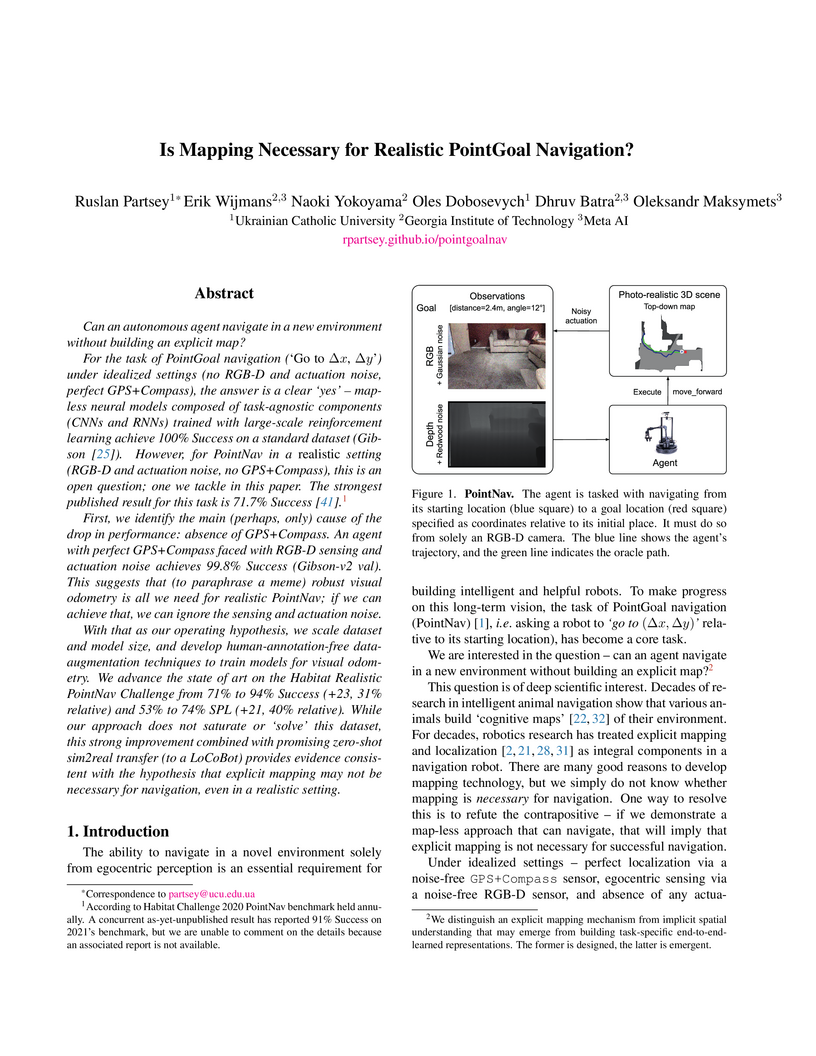
Can an autonomous agent navigate in a new environment without building an
explicit map?
For the task of PointGoal navigation ('Go to , ') under
idealized settings (no RGB-D and actuation noise, perfect GPS+Compass), the
answer is a clear 'yes' - map-less neural models composed of task-agnostic
components (CNNs and RNNs) trained with large-scale reinforcement learning
achieve 100% Success on a standard dataset (Gibson). However, for PointNav in a
realistic setting (RGB-D and actuation noise, no GPS+Compass), this is an open
question; one we tackle in this paper. The strongest published result for this
task is 71.7% Success.
First, we identify the main (perhaps, only) cause of the drop in performance:
the absence of GPS+Compass. An agent with perfect GPS+Compass faced with RGB-D
sensing and actuation noise achieves 99.8% Success (Gibson-v2 val). This
suggests that (to paraphrase a meme) robust visual odometry is all we need for
realistic PointNav; if we can achieve that, we can ignore the sensing and
actuation noise.
With that as our operating hypothesis, we scale the dataset and model size,
and develop human-annotation-free data-augmentation techniques to train models
for visual odometry. We advance the state of art on the Habitat Realistic
PointNav Challenge from 71% to 94% Success (+23, 31% relative) and 53% to 74%
SPL (+21, 40% relative). While our approach does not saturate or 'solve' this
dataset, this strong improvement combined with promising zero-shot sim2real
transfer (to a LoCoBot) provides evidence consistent with the hypothesis that
explicit mapping may not be necessary for navigation, even in a realistic
setting.

29 May 2025
This paper presents one of the top-performing solutions to the UNLP 2025
Shared Task on Detecting Manipulation in Social Media. The task focuses on
detecting and classifying rhetorical and stylistic manipulation techniques used
to influence Ukrainian Telegram users. For the classification subtask, we
fine-tuned the Gemma 2 language model with LoRA adapters and applied a
second-level classifier leveraging meta-features and threshold optimization.
For span detection, we employed an XLM-RoBERTa model trained for multi-target,
including token binary classification. Our approach achieved 2nd place in
classification and 3rd place in span detection.

07 Jul 2025
Multi-object tracking (MOT) aims to maintain consistent identities of objects across video frames. Associating objects in low-frame-rate videos captured by moving unmanned aerial vehicles (UAVs) in actual combat scenarios is complex due to rapid changes in object appearance and position within the frame. The task becomes even more challenging due to image degradation caused by cloud video streaming and compression algorithms. We present how instance association learning from single-frame annotations can overcome these challenges. We show that global features of the scene provide crucial context for low-FPS instance association, allowing our solution to be robust to distractors and gaps in detections. We also demonstrate that such a tracking approach maintains high association quality even when reducing the input image resolution and latent representation size for faster inference. Finally, we present a benchmark dataset of annotated military vehicles collected from publicly available data sources. This paper was initially presented at the NATO Science and Technology Organization Symposium (ICMCIS) organized by the Information Systems Technology (IST)Scientific and Technical Committee, IST-209-RSY - the ICMCIS, held in Oeiras, Portugal, 13-14 May 2025.

21 Apr 2025
Wikipedia is powered by MediaWiki, a free and open-source software that is
also the infrastructure for many other wiki-based online encyclopedias. These
include the recently launched website Ruwiki, which has copied and modified the
original Russian Wikipedia content to conform to Russian law. To identify
practices and narratives that could be associated with different forms of
knowledge manipulation, this article presents an in-depth analysis of this
Russian Wikipedia fork. We propose a methodology to characterize the main
changes with respect to the original version. The foundation of this study is a
comprehensive comparative analysis of more than 1.9M articles from Russian
Wikipedia and its fork. Using meta-information and geographical, temporal,
categorical, and textual features, we explore the changes made by Ruwiki
editors. Furthermore, we present a classification of the main topics of
knowledge manipulation in this fork, including a numerical estimation of their
scope. This research not only sheds light on significant changes within Ruwiki,
but also provides a methodology that could be applied to analyze other
Wikipedia forks and similar collaborative projects.

05 Feb 2025
This report analyzes key trends, challenges, risks, and opportunities
associated with the development of Large Language Models (LLMs) globally. It
examines national experiences in developing LLMs and assesses the feasibility
of investment in this sector. Additionally, the report explores strategies for
implementing, regulating, and financing AI projects at the state level.
09 Jul 2024
In order to develop robots that can effectively serve as versatile and
capable home assistants, it is crucial for them to reliably perceive and
interact with a wide variety of objects across diverse environments. To this
end, we proposed Open Vocabulary Mobile Manipulation as a key benchmark task
for robotics: finding any object in a novel environment and placing it on any
receptacle surface within that environment. We organized a NeurIPS 2023
competition featuring both simulation and real-world components to evaluate
solutions to this task. Our baselines on the most challenging version of this
task, using real perception in simulation, achieved only an 0.8% success rate;
by the end of the competition, the best participants achieved an 10.8\% success
rate, a 13x improvement. We observed that the most successful teams employed a
variety of methods, yet two common threads emerged among the best solutions:
enhancing error detection and recovery, and improving the integration of
perception with decision-making processes. In this paper, we detail the results
and methodologies used, both in simulation and real-world settings. We discuss
the lessons learned and their implications for future research. Additionally,
we compare performance in real and simulated environments, emphasizing the
necessity for robust generalization to novel settings.
27 Feb 2025
SoftServe Inc. developed a hybrid recommendation system for K-12 students within the AYO® personalized learning platform, which incorporates a dedicated fairness analysis framework. The system assesses algorithmic bias by analyzing precision differences in recommendations across various protected student groups and found that observed disparities in certain categories were due to external factors or upstream data rather than the recommendation algorithm itself.

15 Oct 2021
We apply an ensemble of modified TransBTS, nnU-Net, and a combination of both
for the segmentation task of the BraTS 2021 challenge. In fact, we change the
original architecture of the TransBTS model by adding Squeeze-and-Excitation
blocks, an increasing number of CNN layers, replacing positional encoding in
Transformer block with a learnable Multilayer Perceptron (MLP) embeddings,
which makes Transformer adjustable to any input size during inference. With
these modifications, we are able to largely improve TransBTS performance.
Inspired by a nnU-Net framework we decided to combine it with our modified
TransBTS by changing the architecture inside nnU-Net to our custom model. On
the Validation set of BraTS 2021, the ensemble of these approaches achieves
0.8496, 0.8698, 0.9256 Dice score and 15.72, 11.057, 3.374 HD95 for enhancing
tumor, tumor core, and whole tumor, correspondingly. Our code is publicly
available.

05 Dec 2024

Human head detection, keypoint estimation, and 3D head model fitting are
essential tasks with many applications. However, traditional real-world
datasets often suffer from bias, privacy, and ethical concerns, and they have
been recorded in laboratory environments, which makes it difficult for trained
models to generalize. Here, we introduce \method -- a large-scale synthetic
dataset generated with diffusion models for human head detection and 3D mesh
estimation. Our dataset comprises over 1 million high-resolution images, each
annotated with detailed 3D head meshes, facial landmarks, and bounding boxes.
Using this dataset, we introduce a new model architecture capable of
simultaneous head detection and head mesh reconstruction from a single image in
a single step. Through extensive experimental evaluations, we demonstrate that
models trained on our synthetic data achieve strong performance on real images.
Furthermore, the versatility of our dataset makes it applicable across a broad
spectrum of tasks, offering a general and comprehensive representation of human
heads.

10 Oct 2024
This paper investigates the challenges and potential solutions for improving
machine learning systems for low-resource languages. State-of-the-art models in
natural language processing (NLP), text-to-speech (TTS), speech-to-text (STT),
and vision-language models (VLM) rely heavily on large datasets, which are
often unavailable for low-resource languages. This research explores key areas
such as defining "quality data," developing methods for generating appropriate
data and enhancing accessibility to model training. A comprehensive review of
current methodologies, including data augmentation, multilingual transfer
learning, synthetic data generation, and data selection techniques, highlights
both advancements and limitations. Several open research questions are
identified, providing a framework for future studies aimed at optimizing data
utilization, reducing the required data quantity, and maintaining high-quality
model performance. By addressing these challenges, the paper aims to make
advanced machine learning models more accessible for low-resource languages,
enhancing their utility and impact across various sectors.
09 Jun 2025
Harvard Medical School University of PennsylvaniaMaastricht UniversityDana-Farber Cancer InstituteLudwig Maximilian University of MunichUniversity of California San FranciscoBrigham and Women’s HospitalUT Southwestern Medical CenterMass General BrighamBoston Children’s HospitalUkrainian Catholic UniversityThe Children’s Hospital of PhiladelphiaGeorge Washington School of Medicine and Health Sciences
University of PennsylvaniaMaastricht UniversityDana-Farber Cancer InstituteLudwig Maximilian University of MunichUniversity of California San FranciscoBrigham and Women’s HospitalUT Southwestern Medical CenterMass General BrighamBoston Children’s HospitalUkrainian Catholic UniversityThe Children’s Hospital of PhiladelphiaGeorge Washington School of Medicine and Health Sciences
University of PennsylvaniaMaastricht UniversityDana-Farber Cancer InstituteLudwig Maximilian University of MunichUniversity of California San FranciscoBrigham and Women’s HospitalUT Southwestern Medical CenterMass General BrighamBoston Children’s HospitalUkrainian Catholic UniversityThe Children’s Hospital of PhiladelphiaGeorge Washington School of Medicine and Health SciencesExtracranial tissues visible on brain magnetic resonance imaging (MRI) may
hold significant value for characterizing health conditions and clinical
decision-making, yet they are rarely quantified. Current tools have not been
widely validated, particularly in settings of developing brains or underlying
pathology. We present TissUnet, a deep learning model that segments skull bone,
subcutaneous fat, and muscle from routine three-dimensional T1-weighted MRI,
with or without contrast enhancement. The model was trained on 155 paired
MRI-computed tomography (CT) scans and validated across nine datasets covering
a wide age range and including individuals with brain tumors. In comparison to
AI-CT-derived labels from 37 MRI-CT pairs, TissUnet achieved a median Dice
coefficient of 0.79 [IQR: 0.77-0.81] in a healthy adult cohort. In a second
validation using expert manual annotations, median Dice was 0.83 [IQR:
0.83-0.84] in healthy individuals and 0.81 [IQR: 0.78-0.83] in tumor cases,
outperforming previous state-of-the-art method. Acceptability testing resulted
in an 89% acceptance rate after adjudication by a tie-breaker(N=108 MRIs), and
TissUnet demonstrated excellent performance in the blinded comparative review
(N=45 MRIs), including both healthy and tumor cases in pediatric populations.
TissUnet enables fast, accurate, and reproducible segmentation of extracranial
tissues, supporting large-scale studies on craniofacial morphology, treatment
effects, and cardiometabolic risk using standard brain T1w MRI.

11 Feb 2025

CREDAL introduces the first systematic methodology for the 'close reading' of data models, enabling practitioners to uncover embedded biases, power dynamics, and societal implications within data systems. A qualitative study demonstrated the methodology's usability and usefulness in enhancing understanding, design, and critical evaluation of data models, even for those new to critical analysis.

11 Oct 2025
 KAIST
KAIST University of Cambridge
University of Cambridge Shanghai Jiao Tong University
Shanghai Jiao Tong University City University of Hong Kong
City University of Hong Kong University of California, San Diego
University of California, San Diego University of Texas at Austin
University of Texas at Austin Columbia University
Columbia University EPFLBielefeld University
EPFLBielefeld University MITMIT-IBM Watson AI LabUniversity of Colorado Boulder
MITMIT-IBM Watson AI LabUniversity of Colorado Boulder University of GroningenAix Marseille UniversityNara Institute of Science and TechnologyUniversity of TehranUniversity of Cape TownUniversity of the Basque CountrySomosNLPUkrainian Catholic UniversityHiTZ
University of GroningenAix Marseille UniversityNara Institute of Science and TechnologyUniversity of TehranUniversity of Cape TownUniversity of the Basque CountrySomosNLPUkrainian Catholic UniversityHiTZWe present BabyBabelLM, a multilingual collection of datasets modeling the language a person observes from birth until they acquire a native language. We curate developmentally plausible pretraining data aiming to cover the equivalent of 100M English words of content in each of 45 languages. We compile evaluation suites and train baseline models in each language. BabyBabelLM aims to facilitate multilingual pretraining and cognitive modeling.

08 Jun 2023
This work investigates the effectiveness of different pseudonymization techniques, ranging from rule-based substitutions to using pre-trained Large Language Models (LLMs), on a variety of datasets and models used for two widely used NLP tasks: text classification and summarization. Our work provides crucial insights into the gaps between original and anonymized data (focusing on the pseudonymization technique) and model quality and fosters future research into higher-quality anonymization techniques to better balance the trade-offs between data protection and utility preservation. We make our code, pseudonymized datasets, and downstream models publicly available
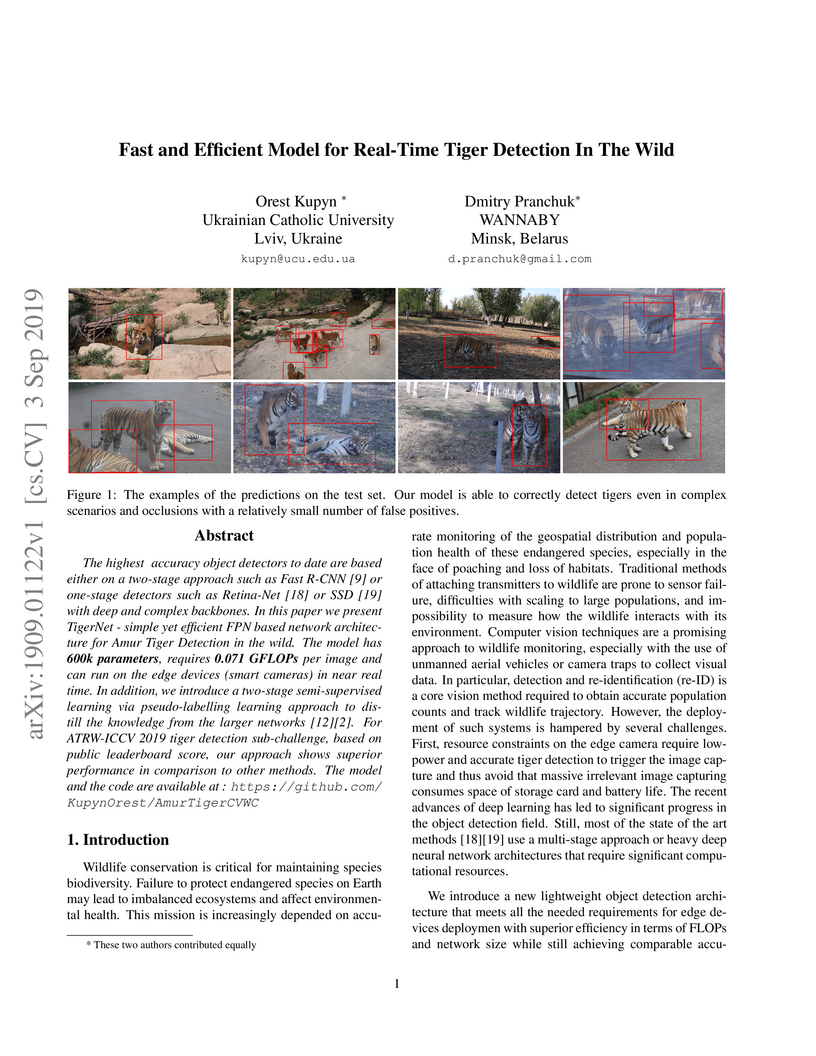
03 Sep 2019
The highest accuracy object detectors to date are based either on a two-stage
approach such as Fast R-CNN or one-stage detectors such as Retina-Net or SSD
with deep and complex backbones. In this paper we present TigerNet - simple yet
efficient FPN based network architecture for Amur Tiger Detection in the wild.
The model has 600k parameters, requires 0.071 GFLOPs per image and can run on
the edge devices (smart cameras) in near real time. In addition, we introduce a
two-stage semi-supervised learning via pseudo-labelling learning approach to
distill the knowledge from the larger networks. For ATRW-ICCV 2019 tiger
detection sub-challenge, based on public leaderboard score, our approach shows
superior performance in comparison to other methods.
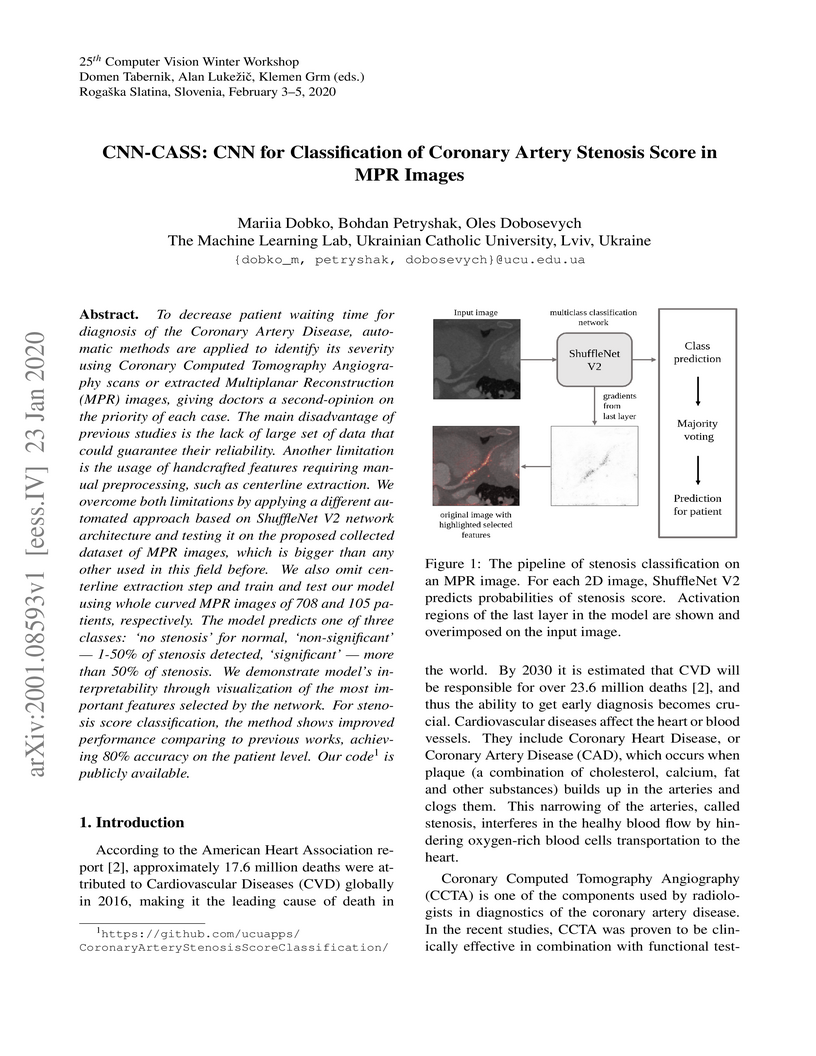
23 Jan 2020
To decrease patient waiting time for diagnosis of the Coronary Artery
Disease, automatic methods are applied to identify its severity using Coronary
Computed Tomography Angiography scans or extracted Multiplanar Reconstruction
(MPR) images, giving doctors a second-opinion on the priority of each case. The
main disadvantage of previous studies is the lack of large set of data that
could guarantee their reliability. Another limitation is the usage of
handcrafted features requiring manual preprocessing, such as centerline
extraction. We overcome both limitations by applying a different automated
approach based on ShuffleNet V2 network architecture and testing it on the
proposed collected dataset of MPR images, which is bigger than any other used
in this field before. We also omit centerline extraction step and train and
test our model using whole curved MPR images of 708 and 105 patients,
respectively. The model predicts one of three classes: 'no stenosis' for
normal, 'non-significant' - 1-50% of stenosis detected, 'significant' - more
than 50% of stenosis. We demonstrate model's interpretability through
visualization of the most important features selected by the network. For
stenosis score classification, the method shows improved performance comparing
to previous works, achieving 80% accuracy on the patient level. Our code is
publicly available.
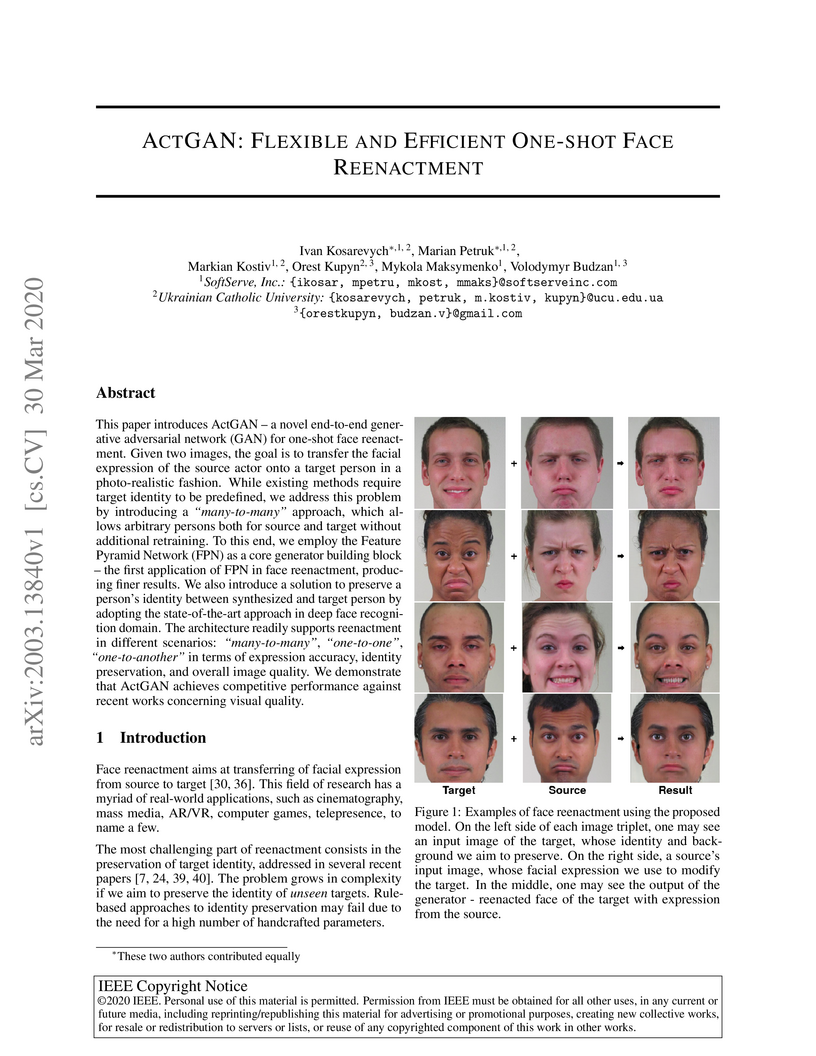
30 Mar 2020
This paper introduces ActGAN - a novel end-to-end generative adversarial
network (GAN) for one-shot face reenactment. Given two images, the goal is to
transfer the facial expression of the source actor onto a target person in a
photo-realistic fashion. While existing methods require target identity to be
predefined, we address this problem by introducing a "many-to-many" approach,
which allows arbitrary persons both for source and target without additional
retraining. To this end, we employ the Feature Pyramid Network (FPN) as a core
generator building block - the first application of FPN in face reenactment,
producing finer results. We also introduce a solution to preserve a person's
identity between synthesized and target person by adopting the state-of-the-art
approach in deep face recognition domain. The architecture readily supports
reenactment in different scenarios: "many-to-many", "one-to-one",
"one-to-another" in terms of expression accuracy, identity preservation, and
overall image quality. We demonstrate that ActGAN achieves competitive
performance against recent works concerning visual quality.
There are no more papers matching your filters at the moment.
