
28 Oct 2024
Echocardiogram video plays a crucial role in analysing cardiac function and diagnosing cardiac diseases. Current deep neural network methods primarily aim to enhance diagnosis accuracy by incorporating prior knowledge, such as segmenting cardiac structures or lesions annotated by human experts. However, diagnosing the inconsistent behaviours of the heart, which exist across both spatial and temporal dimensions, remains extremely challenging. For instance, the analysis of cardiac motion acquires both spatial and temporal information from the heartbeat cycle. To address this issue, we propose a novel reconstruction-based approach named CardiacNet to learn a better representation of local cardiac structures and motion abnormalities through echocardiogram videos. CardiacNet is accompanied by the Consistency Deformation Codebook (CDC) and the Consistency Deformed-Discriminator (CDD) to learn the commonalities across abnormal and normal samples by incorporating cardiac prior knowledge. In addition, we propose benchmark datasets named CardiacNet-PAH and CardiacNet-ASD to evaluate the effectiveness of cardiac disease assessment. In experiments, our CardiacNet can achieve state-of-the-art results in three different cardiac disease assessment tasks on public datasets CAMUS, EchoNet, and our datasets. The code and dataset are available at: this https URL.
19 Aug 2025
Multimodal large language models (MLLMs) have emerged as powerful tools for computational pathology, offering unprecedented opportunities to integrate pathological images with language context for comprehensive diagnostic analysis. These models hold particular promise for automating complex tasks that traditionally require expert interpretation of pathologists. However, current MLLM approaches in pathology demonstrate significantly constrained reasoning capabilities, primarily due to their reliance on expensive chain-of-thought annotations. Additionally, existing methods remain limited to simplex application of visual question answering (VQA) at the region-of-interest (ROI) level, failing to address the full spectrum of diagnostic needs such as ROI classification, detection, segmentation, whole-slide-image (WSI) classification and VQA in clinical practice. In this study, we present SmartPath-R1, a versatile MLLM capable of simultaneously addressing both ROI-level and WSI-level tasks while demonstrating robust pathological reasoning capability. Our framework combines scale-dependent supervised fine-tuning and task-aware reinforcement fine-tuning, which circumvents the requirement for chain-of-thought supervision by leveraging the intrinsic knowledge within MLLM. Furthermore, SmartPath-R1 integrates multiscale and multitask analysis through a mixture-of-experts mechanism, enabling dynamic processing for diverse tasks. We curate a large-scale dataset comprising 2.3M ROI samples and 188K WSI samples for training and evaluation. Extensive experiments across 72 tasks validate the effectiveness and superiority of the proposed approach. This work represents a significant step toward developing versatile, reasoning-enhanced AI systems for precision pathology.

12 Oct 2025
Intraoperative pathology is pivotal to precision surgery, yet its clinical impact is constrained by diagnostic complexity and the limited availability of high-quality frozen-section data. While computational pathology has made significant strides, the lack of large-scale, prospective validation has impeded its routine adoption in surgical workflows. Here, we introduce CRISP, a clinical-grade foundation model developed on over 100,000 frozen sections from eight medical centers, specifically designed to provide Clinical-grade Robust Intraoperative Support for Pathology (CRISP). CRISP was comprehensively evaluated on more than 15,000 intraoperative slides across nearly 100 retrospective diagnostic tasks, including benign-malignant discrimination, key intraoperative decision-making, and pan-cancer detection, etc. The model demonstrated robust generalization across diverse institutions, tumor types, and anatomical sites-including previously unseen sites and rare cancers. In a prospective cohort of over 2,000 patients, CRISP sustained high diagnostic accuracy under real-world conditions, directly informing surgical decisions in 92.6% of cases. Human-AI collaboration further reduced diagnostic workload by 35%, avoided 105 ancillary tests and enhanced detection of micrometastases with 87.5% accuracy. Together, these findings position CRISP as a clinical-grade paradigm for AI-driven intraoperative pathology, bridging computational advances with surgical precision and accelerating the translation of artificial intelligence into routine clinical practice.

09 Dec 2025
It is a long-standing challenge to accurately and efficiently compute thermodynamic quantities of many-body systems at thermal equilibrium. The conventional methods, e.g., Markov chain Monte Carlo, require many steps to equilibrate. The recently developed deep learning methods can perform direct sampling, but only work at a single trained temperature point and risk biased sampling. Here, we propose a variational method for canonical ensembles with differentiable temperature, which gives thermodynamic quantities as continuous functions of temperature akin to an analytical solution. The proposed method is a general framework that works with any tractable density generative model. At optimal, the model is theoretically guaranteed to be the unbiased Boltzmann distribution. We validated our method by calculating phase transitions in the Ising and XY models, demonstrating that our direct-sampling simulations are as accurate as Markov chain Monte Carlo, but more efficient. Moreover, our differentiable free energy aligns closely with the exact one to the second-order derivative, indicating that the variational model captures the subtle thermal transitions at the phase transitions. This functional dependence on external parameters is a fundamental advancement in combining the exceptional fitting ability of deep learning with rigorous physical analysis.
16 Jul 2025
Trajectory planning involving multi-agent interactions has been a long-standing challenge in the field of robotics, primarily burdened by the inherent yet intricate interactions among agents. While game-theoretic methods are widely acknowledged for their effectiveness in managing multi-agent interactions, significant impediments persist when it comes to accommodating the intentional uncertainties of agents. In the context of intentional uncertainties, the heavy computational burdens associated with existing game-theoretic methods are induced, leading to inefficiencies and poor scalability. In this paper, we propose a novel game-theoretic interactive trajectory planning method to effectively address the intentional uncertainties of agents, and it demonstrates both high efficiency and enhanced scalability. As the underpinning basis, we model the interactions between agents under intentional uncertainties as a general Bayesian game, and we show that its agent-form equivalence can be represented as a potential game under certain minor assumptions. The existence and attainability of the optimal interactive trajectories are illustrated, as the corresponding Bayesian Nash equilibrium can be attained by optimizing a unified optimization problem. Additionally, we present a distributed algorithm based on the dual consensus alternating direction method of multipliers (ADMM) tailored to the parallel solving of the problem, thereby significantly improving the scalability. The attendant outcomes from simulations and experiments demonstrate that the proposed method is effective across a range of scenarios characterized by general forms of intentional uncertainties. Its scalability surpasses that of existing centralized and decentralized baselines, allowing for real-time interactive trajectory planning in uncertain game settings.
01 Sep 2025
The Low-level Pathology Foundation Model (LPFM) from The Hong Kong University of Science and Technology unifies diverse low-level image enhancement tasks, including restoration (super-resolution, deblurring, denoising) and virtual staining, within a single prompt-guided conditional diffusion framework. LPFM achieves superior quantitative performance, outperforming state-of-the-art methods in 56 out of 66 tasks, with PSNR gains of 10-15% for restoration and SSIM improvements of 12-18% for virtual staining, establishing a new paradigm for foundational image quality in computational pathology.
07 Apr 2025
Existing multi-modal learning methods on fundus and OCT images mostly require
both modalities to be available and strictly paired for training and testing,
which appears less practical in clinical scenarios. To expand the scope of
clinical applications, we formulate a novel setting, "OCT-enhanced disease
recognition from fundus images", that allows for the use of unpaired
multi-modal data during the training phase and relies on the widespread fundus
photographs for testing. To benchmark this setting, we present the first large
multi-modal multi-class dataset for eye disease diagnosis, MultiEYE, and
propose an OCT-assisted Conceptual Distillation Approach (OCT-CoDA), which
employs semantically rich concepts to extract disease-related knowledge from
OCT images and leverage them into the fundus model. Specifically, we regard the
image-concept relation as a link to distill useful knowledge from the OCT
teacher model to the fundus student model, which considerably improves the
diagnostic performance based on fundus images and formulates the cross-modal
knowledge transfer into an explainable process. Through extensive experiments
on the multi-disease classification task, our proposed OCT-CoDA demonstrates
remarkable results and interpretability, showing great potential for clinical
application. Our dataset and code are available at
this https URL

22 Jul 2025
 Imperial College London
Imperial College London University College London
University College London The Chinese University of Hong KongTechnical University of Munich (TUM)TU Dresden
The Chinese University of Hong KongTechnical University of Munich (TUM)TU Dresden King’s College LondonKyung Hee University
King’s College LondonKyung Hee University HKUSTEindhoven University of TechnologyGerman Cancer Research Center (DKFZ)University of MinhoKorea Institute of Science and Technology (KIST)Muroran Institute of TechnologyTUM University HospitalHKUST Shenzhen-Hong Kong Collaborative Innovation Research InstituteSao Paulo State University (UNESP)Klagenfurt UniversityOTH RegensburgNational Center for Tumor Diseases (NCT/UCC)Konica Minolta Inc.Niigata University of Health and WelfareLos Andes UniversityRegensburg UniversityJmees IncHanglok TechMedtronic Ltd.AKTORmed Robotic Surgery
HKUSTEindhoven University of TechnologyGerman Cancer Research Center (DKFZ)University of MinhoKorea Institute of Science and Technology (KIST)Muroran Institute of TechnologyTUM University HospitalHKUST Shenzhen-Hong Kong Collaborative Innovation Research InstituteSao Paulo State University (UNESP)Klagenfurt UniversityOTH RegensburgNational Center for Tumor Diseases (NCT/UCC)Konica Minolta Inc.Niigata University of Health and WelfareLos Andes UniversityRegensburg UniversityJmees IncHanglok TechMedtronic Ltd.AKTORmed Robotic SurgeryReliable recognition and localization of surgical instruments in endoscopic video recordings are foundational for a wide range of applications in computer- and robot-assisted minimally invasive surgery (RAMIS), including surgical training, skill assessment, and autonomous assistance. However, robust performance under real-world conditions remains a significant challenge. Incorporating surgical context - such as the current procedural phase - has emerged as a promising strategy to improve robustness and interpretability.
To address these challenges, we organized the Surgical Procedure Phase, Keypoint, and Instrument Recognition (PhaKIR) sub-challenge as part of the Endoscopic Vision (EndoVis) challenge at MICCAI 2024. We introduced a novel, multi-center dataset comprising thirteen full-length laparoscopic cholecystectomy videos collected from three distinct medical institutions, with unified annotations for three interrelated tasks: surgical phase recognition, instrument keypoint estimation, and instrument instance segmentation. Unlike existing datasets, ours enables joint investigation of instrument localization and procedural context within the same data while supporting the integration of temporal information across entire procedures.
We report results and findings in accordance with the BIAS guidelines for biomedical image analysis challenges. The PhaKIR sub-challenge advances the field by providing a unique benchmark for developing temporally aware, context-driven methods in RAMIS and offers a high-quality resource to support future research in surgical scene understanding.
05 Apr 2023

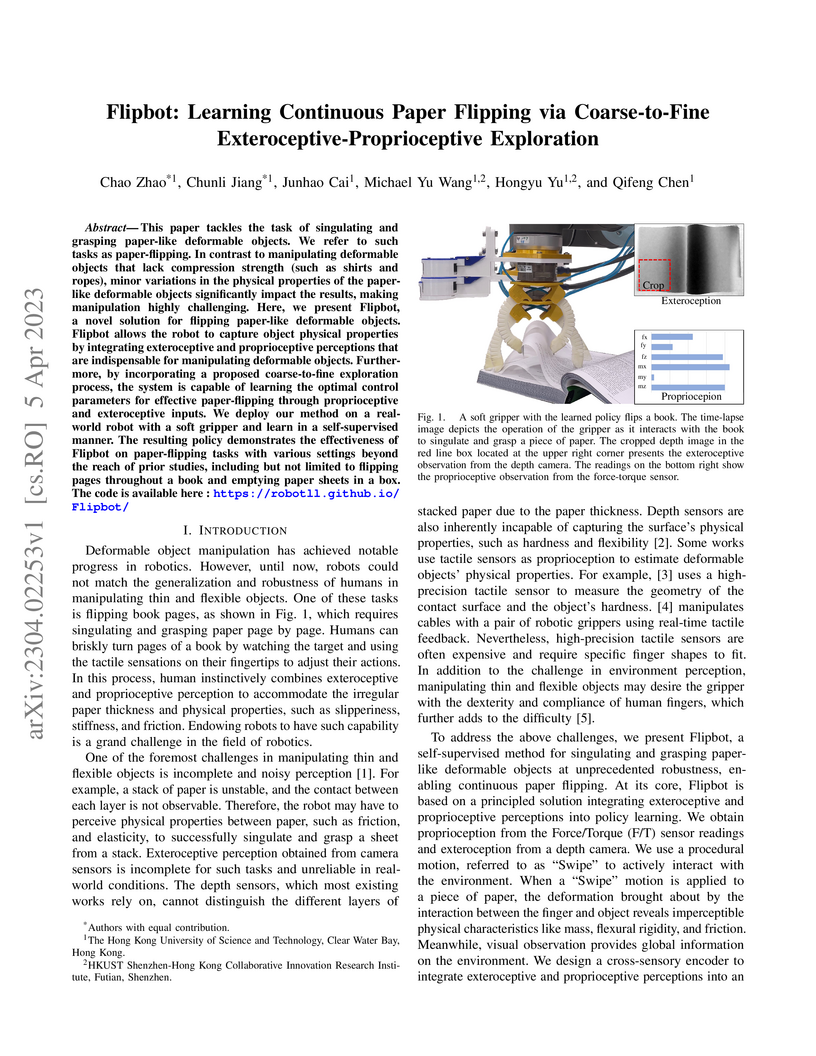
This paper tackles the task of singulating and grasping paper-like deformable objects. We refer to such tasks as paper-flipping. In contrast to manipulating deformable objects that lack compression strength (such as shirts and ropes), minor variations in the physical properties of the paper-like deformable objects significantly impact the results, making manipulation highly challenging. Here, we present Flipbot, a novel solution for flipping paper-like deformable objects. Flipbot allows the robot to capture object physical properties by integrating exteroceptive and proprioceptive perceptions that are indispensable for manipulating deformable objects. Furthermore, by incorporating a proposed coarse-to-fine exploration process, the system is capable of learning the optimal control parameters for effective paper-flipping through proprioceptive and exteroceptive inputs. We deploy our method on a real-world robot with a soft gripper and learn in a self-supervised manner. The resulting policy demonstrates the effectiveness of Flipbot on paper-flipping tasks with various settings beyond the reach of prior studies, including but not limited to flipping pages throughout a book and emptying paper sheets in a box.

06 May 2025
Medical image segmentation is a pivotal task within the realms of medical
image analysis and computer vision. While current methods have shown promise in
accurately segmenting major regions of interest, the precise segmentation of
boundary areas remains challenging. In this study, we propose a novel network
architecture named CTO, which combines Convolutional Neural Networks (CNNs),
Vision Transformer (ViT) models, and explicit edge detection operators to
tackle this challenge. CTO surpasses existing methods in terms of segmentation
accuracy and strikes a better balance between accuracy and efficiency, without
the need for additional data inputs or label injections. Specifically, CTO
adheres to the canonical encoder-decoder network paradigm, with a dual-stream
encoder network comprising a mainstream CNN stream for capturing local features
and an auxiliary StitchViT stream for integrating long-range dependencies.
Furthermore, to enhance the model's ability to learn boundary areas, we
introduce a boundary-guided decoder network that employs binary boundary masks
generated by dedicated edge detection operators to provide explicit guidance
during the decoding process. We validate the performance of CTO through
extensive experiments conducted on seven challenging medical image segmentation
datasets, namely ISIC 2016, PH2, ISIC 2018, CoNIC, LiTS17, and BTCV. Our
experimental results unequivocally demonstrate that CTO achieves
state-of-the-art accuracy on these datasets while maintaining competitive model
complexity. The codes have been released at:
this https URL

31 Aug 2024
Pre-trained large vision-language models (VLMs) like CLIP have revolutionized visual representation learning using natural language as supervisions, and demonstrated promising generalization ability. In this work, we propose ViP, a novel visual symptom-guided prompt learning framework for medical image analysis, which facilitates general knowledge transfer from CLIP. ViP consists of two key components: a visual symptom generator (VSG) and a dual-prompt network. Specifically, VSG aims to extract explicable visual symptoms from pre-trained large language models, while the dual-prompt network utilizes these visual symptoms to guide the training on two learnable prompt modules, i.e., context prompt and merge prompt, which effectively adapts our framework to medical image analysis via large VLMs. Extensive experimental results demonstrate that ViP can outperform state-of-the-art methods on two challenging datasets.

18 Jul 2024

As automation technologies advance, the need for compact and multi-modal sensors in robotic applications is growing. To address this demand, we introduce CompdVision, a novel sensor that employs a compound-eye imaging system to combine near-field 3D visual and tactile sensing within a compact form factor. CompdVision utilizes two types of vision units to address diverse sensing needs, eliminating the need for complex modality conversion. Stereo units with far-focus lenses can see through the transparent elastomer for depth estimation beyond the contact surface. Simultaneously, tactile units with near-focus lenses track the movement of markers embedded in the elastomer to obtain contact deformation. Experimental results validate the sensor's superior performance in 3D visual and tactile sensing, proving its capability for reliable external object depth estimation and precise measurement of tangential and normal contact forces. The dual modalities and compact design make the sensor a versatile tool for robotic manipulation.

07 Aug 2024

Ordinal regression is a fundamental problem within the field of computer vision, with customised well-trained models on specific tasks. While pre-trained vision-language models (VLMs) have exhibited impressive performance on various vision tasks, their potential for ordinal regression has received less exploration. In this study, we first investigate CLIP's potential for ordinal regression, from which we expect the model could generalise to different ordinal regression tasks and scenarios. Unfortunately, vanilla CLIP fails on this task, since current VLMs have a well-documented limitation of encapsulating compositional concepts such as number sense. We propose a simple yet effective method called NumCLIP to improve the quantitative understanding of VLMs. We disassemble the exact image to number-specific text matching problem into coarse classification and fine prediction stages. We discretize and phrase each numerical bin with common language concept to better leverage the available pre-trained alignment in CLIP. To consider the inherent continuous property of ordinal regression, we propose a novel fine-grained cross-modal ranking-based regularisation loss specifically designed to keep both semantic and ordinal alignment in CLIP's feature space. Experimental results on three general ordinal regression tasks demonstrate the effectiveness of NumCLIP, with 10% and 3.83% accuracy improvement on historical image dating and image aesthetics assessment task, respectively. Code is publicly available at this https URL.

05 Aug 2024
The concept bottleneck model (CBM) is an interpretable-by-design framework that makes decisions by first predicting a set of interpretable concepts, and then predicting the class label based on the given concepts. Existing CBMs are trained with a fixed set of concepts (concepts are either annotated by the dataset or queried from language models). However, this closed-world assumption is unrealistic in practice, as users may wonder about the role of any desired concept in decision-making after the model is deployed. Inspired by the large success of recent vision-language pre-trained models such as CLIP in zero-shot classification, we propose "OpenCBM" to equip the CBM with open vocabulary concepts via: (1) Aligning the feature space of a trainable image feature extractor with that of a CLIP's image encoder via a prototype based feature alignment; (2) Simultaneously training an image classifier on the downstream dataset; (3) Reconstructing the trained classification head via any set of user-desired textual concepts encoded by CLIP's text encoder. To reveal potentially missing concepts from users, we further propose to iteratively find the closest concept embedding to the residual parameters during the reconstruction until the residual is small enough. To the best of our knowledge, our "OpenCBM" is the first CBM with concepts of open vocabularies, providing users the unique benefit such as removing, adding, or replacing any desired concept to explain the model's prediction even after a model is trained. Moreover, our model significantly outperforms the previous state-of-the-art CBM by 9% in the classification accuracy on the benchmark dataset CUB-200-2011.

11 Oct 2025

A Fixed-Basis Coefficient-to-Coefficient Operator Network (FB-C2CNet) is introduced, which learns mappings between function spaces by operating on coefficient representations derived from pre-selected, fixed basis systems. This framework enhances computational efficiency and accuracy, and improves generalization across diverse problem settings, including high-dimensional and complex domains.

17 Mar 2023
LCE-Calib: Automatic LiDAR-Frame/Event Camera Extrinsic Calibration With A Globally Optimal Solution
LCE-Calib: Automatic LiDAR-Frame/Event Camera Extrinsic Calibration With A Globally Optimal Solution
The combination of LiDARs and cameras enables a mobile robot to perceive environments with multi-modal data, becoming a key factor in achieving robust perception. Traditional frame cameras are sensitive to changing illumination conditions, motivating us to introduce novel event cameras to make LiDAR-camera fusion more complete and robust. However, to jointly exploit these sensors, the challenging extrinsic calibration problem should be addressed. This paper proposes an automatic checkerboard-based approach to calibrate extrinsics between a LiDAR and a frame/event camera, where four contributions are presented. Firstly, we present an automatic feature extraction and checkerboard tracking method from LiDAR's point clouds. Secondly, we reconstruct realistic frame images from event streams, applying traditional corner detectors to event cameras. Thirdly, we propose an initialization-refinement procedure to estimate extrinsics using point-to-plane and point-to-line constraints in a coarse-to-fine manner. Fourthly, we introduce a unified and globally optimal solution to address two optimization problems in calibration. Our approach has been validated with extensive experiments on 19 simulated and real-world datasets and outperforms the state-of-the-art.

23 Oct 2024
How life started on Earth is an unsolved mystery. There are various
hypotheses for the location ranging from outer space to the seafloor,
subseafloor or potentially deeper. Here, we applied extensive ab initio
molecular dynamics (AIMD) simulations to study chemical reactions between
NH, HO, H, and CO at pressures (P) and temperatures (T)
approximating the conditions of Earth's upper mantle (i.e. 10-13 GPa, 1000-1400
K). Contrary to the previous assumptions that larger organic molecules might
readily disintegrate in aqueous solutions at extreme P-T conditions, we found
that many organic compounds formed without any catalysts and persisted in
C-H-O-N fluids under these extreme conditions, including glycine, ribose, urea,
and uracil-like molecules. Particularly, our free energy calculations showed
that the C-N bond is thermodynamically stable at 10 GPa and 1400 K. Moreover,
while the pyranose (six-membered-ring) form of ribose is more stable than the
furanose (five-membered-ring) form at ambient conditions, we observed the
predominant formation of the five-membered-ring form of ribose at extreme
conditions, which is consistent with the exclusive incorporation of
-D-ribofuranose in RNA. We have uncovered a previously unexplored
pathway through which the crucial biomolecules could be abiotically synthesized
from geofluids in the deep interior of Earth and other planets and these formed
biomolecules could potentially contribute to the early stage of the emergency
of life.

15 May 2023

This paper addresses the problem of nearly optimal Vapnik--Chervonenkis
dimension (VC-dimension) and pseudo-dimension estimations of the derivative
functions of deep neural networks (DNNs). Two important applications of these
estimations include: 1) Establishing a nearly tight approximation result of
DNNs in the Sobolev space; 2) Characterizing the generalization error of
machine learning methods with loss functions involving function derivatives.
This theoretical investigation fills the gap of learning error estimations for
a wide range of physics-informed machine learning models and applications
including generative models, solving partial differential equations, operator
learning, network compression, distillation, regularization, etc.

18 Mar 2025
Neural network-based approaches have recently shown significant promise in
solving partial differential equations (PDEs) in science and engineering,
especially in scenarios featuring complex domains or incorporation of empirical
data. One advantage of the neural network methods for PDEs lies in its
automatic differentiation (AD), which necessitates only the sample points
themselves, unlike traditional finite difference (FD) approximations that
require nearby local points to compute derivatives. In this paper, we
quantitatively demonstrate the advantage of AD in training neural networks. The
concept of truncated entropy is introduced to characterize the training
property. Specifically, through comprehensive experimental and theoretical
analyses conducted on random feature models and two-layer neural networks, we
discover that the defined truncated entropy serves as a reliable metric for
quantifying the residual loss of random feature models and the training speed
of neural networks for both AD and FD methods. Our experimental and theoretical
analyses demonstrate that, from a training perspective, AD outperforms FD in
solving PDEs.

13 Sep 2024
General networks for 3D medical image segmentation have recently undergone extensive exploration. Behind the exceptional performance of these networks lies a significant demand for a large volume of pixel-level annotated data, which is time-consuming and labor-intensive. The emergence of the Segment Anything Model (SAM) has enabled this model to achieve superior performance in 2D medical image segmentation tasks via parameter- and data-efficient feature adaptation. However, the introduction of additional depth channels in 3D medical images not only prevents the sharing of 2D pre-trained features but also results in a quadratic increase in the computational cost for adapting SAM. To overcome these challenges, we present the Tri-Plane Mamba (TP-Mamba) adapters tailored for the SAM, featuring two major innovations: 1) multi-scale 3D convolutional adapters, optimized for efficiently processing local depth-level information, 2) a tri-plane mamba module, engineered to capture long-range depth-level representation without significantly increasing computational costs. This approach achieves state-of-the-art performance in 3D CT organ segmentation tasks. Remarkably, this superior performance is maintained even with scarce training data. Specifically using only three CT training samples from the BTCV dataset, it surpasses conventional 3D segmentation networks, attaining a Dice score that is up to 12% higher.
There are no more papers matching your filters at the moment.
