
04 Oct 2021

Drones, or general UAVs, equipped with cameras have been fast deployed with a wide range of applications, including agriculture, aerial photography, and surveillance. Consequently, automatic understanding of visual data collected from drones becomes highly demanding, bringing computer vision and drones more and more closely. To promote and track the developments of object detection and tracking algorithms, we have organized three challenge workshops in conjunction with ECCV 2018, ICCV 2019 and ECCV 2020, attracting more than 100 teams around the world. We provide a large-scale drone captured dataset, VisDrone, which includes four tracks, i.e., (1) image object detection, (2) video object detection, (3) single object tracking, and (4) multi-object tracking. In this paper, we first present a thorough review of object detection and tracking datasets and benchmarks, and discuss the challenges of collecting large-scale drone-based object detection and tracking datasets with fully manual annotations. After that, we describe our VisDrone dataset, which is captured over various urban/suburban areas of 14 different cities across China from North to South. Being the largest such dataset ever published, VisDrone enables extensive evaluation and investigation of visual analysis algorithms for the drone platform. We provide a detailed analysis of the current state of the field of large-scale object detection and tracking on drones, and conclude the challenge as well as propose future directions. We expect the benchmark largely boost the research and development in video analysis on drone platforms. All the datasets and experimental results can be downloaded from this https URL.
24 Jan 2020
In recent years, numerous effective multi-object tracking (MOT) methods are developed because of the wide range of applications. Existing performance evaluations of MOT methods usually separate the object tracking step from the object detection step by using the same fixed object detection results for comparisons. In this work, we perform a comprehensive quantitative study on the effects of object detection accuracy to the overall MOT performance, using the new large-scale University at Albany DETection and tRACking (UA-DETRAC) benchmark dataset. The UA-DETRAC benchmark dataset consists of 100 challenging video sequences captured from real-world traffic scenes (over 140,000 frames with rich annotations, including occlusion, weather, vehicle category, truncation, and vehicle bounding boxes) for object detection, object tracking and MOT system. We evaluate complete MOT systems constructed from combinations of state-of-the-art object detection and object tracking methods. Our analysis shows the complex effects of object detection accuracy on MOT system performance. Based on these observations, we propose new evaluation tools and metrics for MOT systems that consider both object detection and object tracking for comprehensive analysis.

08 Jul 2021
We investigate large-scale latent variable models (LVMs) for neural story generation -- an under-explored application for open-domain long text -- with objectives in two threads: generation effectiveness and controllability. LVMs, especially the variational autoencoder (VAE), have achieved both effective and controllable generation through exploiting flexible distributional latent representations. Recently, Transformers and its variants have achieved remarkable effectiveness without explicit latent representation learning, thus lack satisfying controllability in generation. In this paper, we advocate to revive latent variable modeling, essentially the power of representation learning, in the era of Transformers to enhance controllability without hurting state-of-the-art generation effectiveness. Specifically, we integrate latent representation vectors with a Transformer-based pre-trained architecture to build conditional variational autoencoder (CVAE). Model components such as encoder, decoder and the variational posterior are all built on top of pre-trained language models -- GPT2 specifically in this paper. Experiments demonstrate state-of-the-art conditional generation ability of our model, as well as its excellent representation learning capability and controllability.
26 Jan 2022
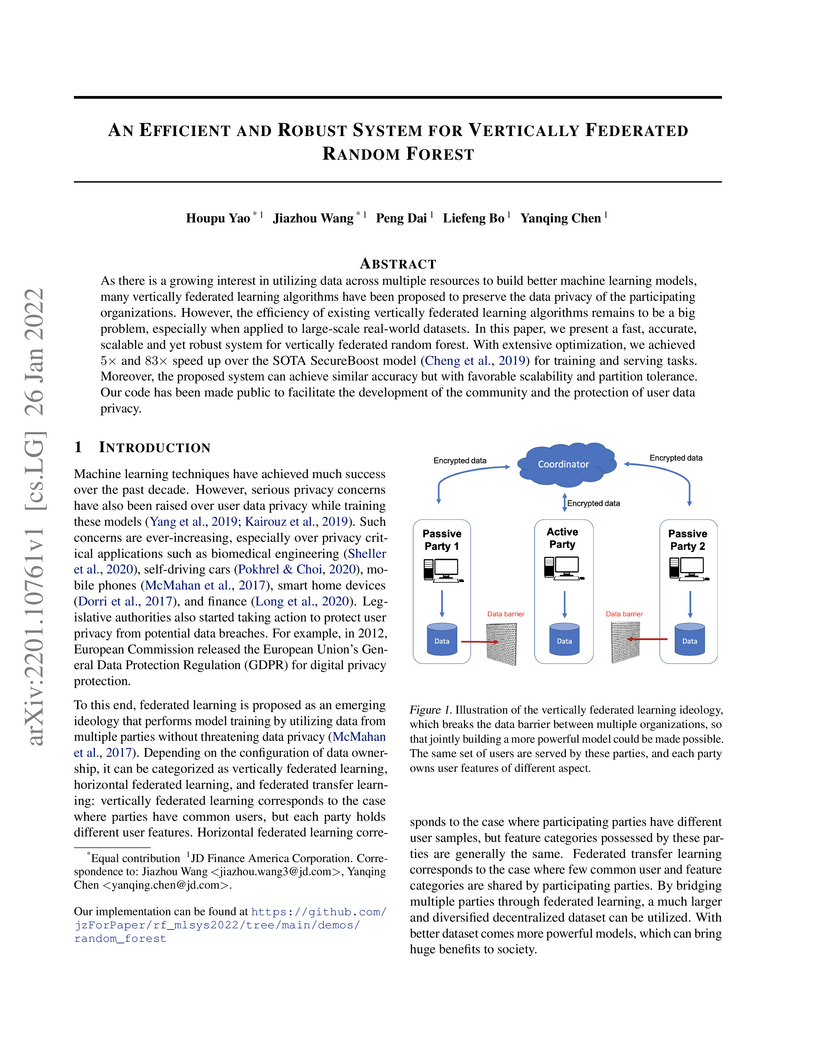
As there is a growing interest in utilizing data across multiple resources to
build better machine learning models, many vertically federated learning
algorithms have been proposed to preserve the data privacy of the participating
organizations. However, the efficiency of existing vertically federated
learning algorithms remains to be a big problem, especially when applied to
large-scale real-world datasets. In this paper, we present a fast, accurate,
scalable and yet robust system for vertically federated random forest. With
extensive optimization, we achieved and speed up over the
SOTA SecureBoost model \cite{cheng2019secureboost} for training and serving
tasks. Moreover, the proposed system can achieve similar accuracy but with
favorable scalability and partition tolerance. Our code has been made public to
facilitate the development of the community and the protection of user data
privacy.

23 Apr 2022

Crime prediction is crucial for public safety and resource optimization, yet is very challenging due to two aspects: i) the dynamics of criminal patterns across time and space, crime events are distributed unevenly on both spatial and temporal domains; ii) time-evolving dependencies between different types of crimes (e.g., Theft, Robbery, Assault, Damage) which reveal fine-grained semantics of crimes. To tackle these challenges, we propose Spatial-Temporal Sequential Hypergraph Network (ST-SHN) to collectively encode complex crime spatial-temporal patterns as well as the underlying category-wise crime semantic relationships. In specific, to handle spatial-temporal dynamics under the long-range and global context, we design a graph-structured message passing architecture with the integration of the hypergraph learning paradigm. To capture category-wise crime heterogeneous relations in a dynamic environment, we introduce a multi-channel routing mechanism to learn the time-evolving structural dependency across crime types. We conduct extensive experiments on two real-world datasets, showing that our proposed ST-SHN framework can significantly improve the prediction performance as compared to various state-of-the-art baselines. The source code is available at: this https URL.
23 Aug 2021
In this paper, we propose a novel two-stage context-aware network named CANet for shadow removal, in which the contextual information from non-shadow regions is transferred to shadow regions at the embedded feature spaces. At Stage-I, we propose a contextual patch matching (CPM) module to generate a set of potential matching pairs of shadow and non-shadow patches. Combined with the potential contextual relationships between shadow and non-shadow regions, our well-designed contextual feature transfer (CFT) mechanism can transfer contextual information from non-shadow to shadow regions at different scales. With the reconstructed feature maps, we remove shadows at L and A/B channels separately. At Stage-II, we use an encoder-decoder to refine current results and generate the final shadow removal results. We evaluate our proposed CANet on two benchmark datasets and some real-world shadow images with complex scenes. Extensive experimental results strongly demonstrate the efficacy of our proposed CANet and exhibit superior performance to state-of-the-arts.
26 May 2022
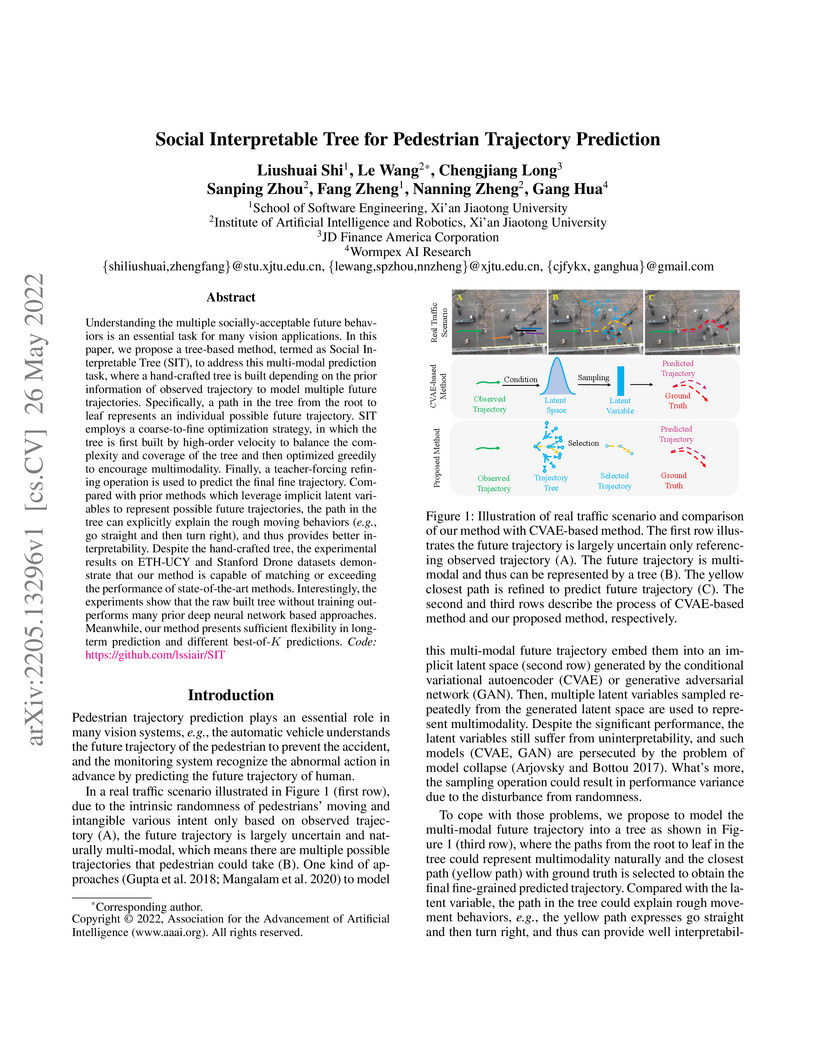
Understanding the multiple socially-acceptable future behaviors is an essential task for many vision applications. In this paper, we propose a tree-based method, termed as Social Interpretable Tree (SIT), to address this multi-modal prediction task, where a hand-crafted tree is built depending on the prior information of observed trajectory to model multiple future trajectories. Specifically, a path in the tree from the root to leaf represents an individual possible future trajectory. SIT employs a coarse-to-fine optimization strategy, in which the tree is first built by high-order velocity to balance the complexity and coverage of the tree and then optimized greedily to encourage multimodality. Finally, a teacher-forcing refining operation is used to predict the final fine trajectory. Compared with prior methods which leverage implicit latent variables to represent possible future trajectories, the path in the tree can explicitly explain the rough moving behaviors (e.g., go straight and then turn right), and thus provides better interpretability. Despite the hand-crafted tree, the experimental results on ETH-UCY and Stanford Drone datasets demonstrate that our method is capable of matching or exceeding the performance of state-of-the-art methods. Interestingly, the experiments show that the raw built tree without training outperforms many prior deep neural network based approaches. Meanwhile, our method presents sufficient flexibility in long-term prediction and different best-of- predictions.
06 May 2021
To promote the developments of object detection, tracking and counting algorithms in drone-captured videos, we construct a benchmark with a new drone-captured largescale dataset, named as DroneCrowd, formed by 112 video clips with 33,600 HD frames in various scenarios. Notably, we annotate 20,800 people trajectories with 4.8 million heads and several video-level attributes. Meanwhile, we design the Space-Time Neighbor-Aware Network (STNNet) as a strong baseline to solve object detection, tracking and counting jointly in dense crowds. STNNet is formed by the feature extraction module, followed by the density map estimation heads, and localization and association subnets. To exploit the context information of neighboring objects, we design the neighboring context loss to guide the association subnet training, which enforces consistent relative position of nearby objects in temporal domain. Extensive experiments on our DroneCrowd dataset demonstrate that STNNet performs favorably against the state-of-the-arts.

08 Oct 2021
Social recommendation task aims to predict users' preferences over items with
the incorporation of social connections among users, so as to alleviate the
sparse issue of collaborative filtering. While many recent efforts show the
effectiveness of neural network-based social recommender systems, several
important challenges have not been well addressed yet: (i) The majority of
models only consider users' social connections, while ignoring the
inter-dependent knowledge across items; (ii) Most of existing solutions are
designed for singular type of user-item interactions, making them infeasible to
capture the interaction heterogeneity; (iii) The dynamic nature of user-item
interactions has been less explored in many social-aware recommendation
techniques. To tackle the above challenges, this work proposes a
Knowledge-aware Coupled Graph Neural Network (KCGN) that jointly injects the
inter-dependent knowledge across items and users into the recommendation
framework. KCGN enables the high-order user- and item-wise relation encoding by
exploiting the mutual information for global graph structure awareness.
Additionally, we further augment KCGN with the capability of capturing dynamic
multi-typed user-item interactive patterns. Experimental studies on real-world
datasets show the effectiveness of our method against many strong baselines in
a variety of settings. Source codes are available at:
this https URL

01 Mar 2021

Vertical federated learning (VFL) attracts increasing attention due to the
emerging demands of multi-party collaborative modeling and concerns of privacy
leakage. In the real VFL applications, usually only one or partial parties hold
labels, which makes it challenging for all parties to collaboratively learn the
model without privacy leakage. Meanwhile, most existing VFL algorithms are
trapped in the synchronous computations, which leads to inefficiency in their
real-world applications. To address these challenging problems, we propose a
novel {\bf VF}L framework integrated with new {\bf b}ackward updating mechanism
and {\bf b}ilevel asynchronous parallel architecture (VF{}),
under which three new algorithms, including VF{}-SGD, -SVRG,
and -SAGA, are proposed. We derive the theoretical results of the convergence
rates of these three algorithms under both strongly convex and nonconvex
conditions. We also prove the security of VF{} under
semi-honest threat models. Extensive experiments on benchmark datasets
demonstrate that our algorithms are efficient, scalable and lossless.

08 Oct 2021
Accurate forecasting of citywide traffic flow has been playing critical role
in a variety of spatial-temporal mining applications, such as intelligent
traffic control and public risk assessment. While previous work has made
significant efforts to learn traffic temporal dynamics and spatial
dependencies, two key limitations exist in current models. First, only the
neighboring spatial correlations among adjacent regions are considered in most
existing methods, and the global inter-region dependency is ignored.
Additionally, these methods fail to encode the complex traffic transition
regularities exhibited with time-dependent and multi-resolution in nature. To
tackle these challenges, we develop a new traffic prediction
framework-Spatial-Temporal Graph Diffusion Network (ST-GDN). In particular,
ST-GDN is a hierarchically structured graph neural architecture which learns
not only the local region-wise geographical dependencies, but also the spatial
semantics from a global perspective. Furthermore, a multi-scale attention
network is developed to empower ST-GDN with the capability of capturing
multi-level temporal dynamics. Experiments on several real-life traffic
datasets demonstrate that ST-GDN outperforms different types of
state-of-the-art baselines. Source codes of implementations are available at
https://github.com/jill001/ST-GDN.

08 Oct 2021
Social recommendation which aims to leverage social connections among users
to enhance the recommendation performance. With the revival of deep learning
techniques, many efforts have been devoted to developing various neural
network-based social recommender systems, such as attention mechanisms and
graph-based message passing frameworks. However, two important challenges have
not been well addressed yet: (i) Most of existing social recommendation models
fail to fully explore the multi-type user-item interactive behavior as well as
the underlying cross-relational inter-dependencies. (ii) While the learned
social state vector is able to model pair-wise user dependencies, it still has
limited representation capacity in capturing the global social context across
users. To tackle these limitations, we propose a new Social Recommendation
framework with Hierarchical Graph Neural Networks (SR-HGNN). In particular, we
first design a relation-aware reconstructed graph neural network to inject the
cross-type collaborative semantics into the recommendation framework. In
addition, we further augment SR-HGNN with a social relation encoder based on
the mutual information learning paradigm between low-level user embeddings and
high-level global representation, which endows SR-HGNN with the capability of
capturing the global social contextual signals. Empirical results on three
public benchmarks demonstrate that SR-HGNN significantly outperforms
state-of-the-art recommendation methods. Source codes are available at:
this https URL
25 Aug 2021
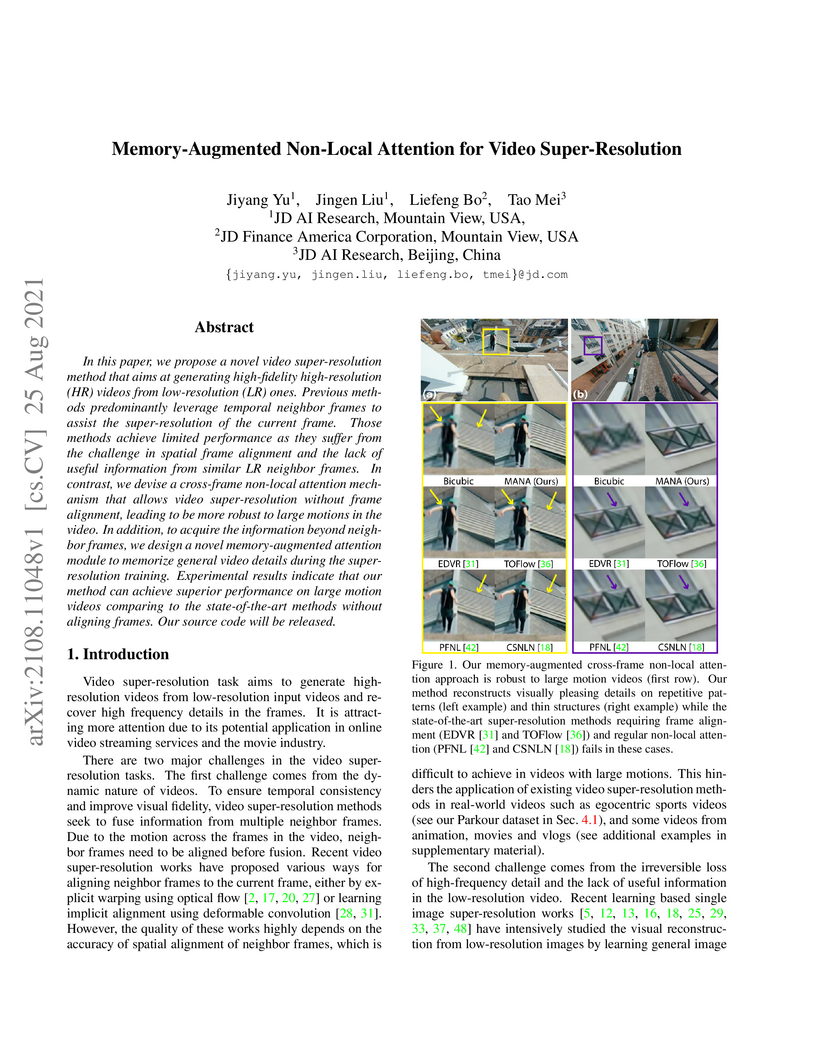
In this paper, we propose a novel video super-resolution method that aims at generating high-fidelity high-resolution (HR) videos from low-resolution (LR) ones. Previous methods predominantly leverage temporal neighbor frames to assist the super-resolution of the current frame. Those methods achieve limited performance as they suffer from the challenge in spatial frame alignment and the lack of useful information from similar LR neighbor frames. In contrast, we devise a cross-frame non-local attention mechanism that allows video super-resolution without frame alignment, leading to be more robust to large motions in the video. In addition, to acquire the information beyond neighbor frames, we design a novel memory-augmented attention module to memorize general video details during the super-resolution training. Experimental results indicate that our method can achieve superior performance on large motion videos comparing to the state-of-the-art methods without aligning frames. Our source code will be released.

08 Oct 2021
In recent years, researchers attempt to utilize online social information to
alleviate data sparsity for collaborative filtering, based on the rationale
that social networks offers the insights to understand the behavioral patterns.
However, due to the overlook of inter-dependent knowledge across items (e.g.,
categories of products), existing social recommender systems are insufficient
to distill the heterogeneous collaborative signals from both user and item
sides. In this work, we propose a Self-Supervised Metagraph Infor-max Network
(SMIN) which investigates the potential of jointly incorporating social- and
knowledge-aware relational structures into the user preference representation
for recommendation. To model relation heterogeneity, we design a
metapath-guided heterogeneous graph neural network to aggregate feature
embeddings from different types of meta-relations across users and items,
em-powering SMIN to maintain dedicated representations for multi-faceted user-
and item-wise dependencies. Additionally, to inject high-order collaborative
signals, we generalize the mutual information learning paradigm under the
self-supervised graph-based collaborative filtering. This endows the expressive
modeling of user-item interactive patterns, by exploring global-level
collaborative relations and underlying isomorphic transformation property of
graph topology. Experimental results on several real-world datasets demonstrate
the effectiveness of our SMIN model over various state-of-the-art
recommendation methods. We release our source code at
this https URL
06 Nov 2020
Fraud detection is extremely critical for e-commerce business. It is the
intent of the companies to detect and prevent fraud as early as possible.
Existing fraud detection methods try to identify unexpected dense subgraphs and
treat related nodes as suspicious. Spectral relaxation-based methods solve the
problem efficiently but hurt the performance due to the relaxed constraints.
Besides, many methods cannot be accelerated with parallel computation or
control the number of returned suspicious nodes because they provide a set of
subgraphs with diverse node sizes. These drawbacks affect the real-world
applications of existing methods. In this paper, we propose an Ensemble-based
Fraud Detection (EnsemFDet) method to scale up fraud detection in bipartite
graphs by decomposing the original problem into subproblems on small-sized
subgraphs. By oversampling the graph and solving the subproblems, the ensemble
approach further votes suspicious nodes without sacrificing the prediction
accuracy. Extensive experiments have been done on real transaction data from
JD.com, which is one of the world's largest e-commerce platforms. Experimental
results demonstrate the effectiveness, practicability, and scalability of
EnsemFDet. More specifically, EnsemFDet is up to 100x faster than the
state-of-the-art methods due to its parallelism with all aspects of data.
16 Mar 2020
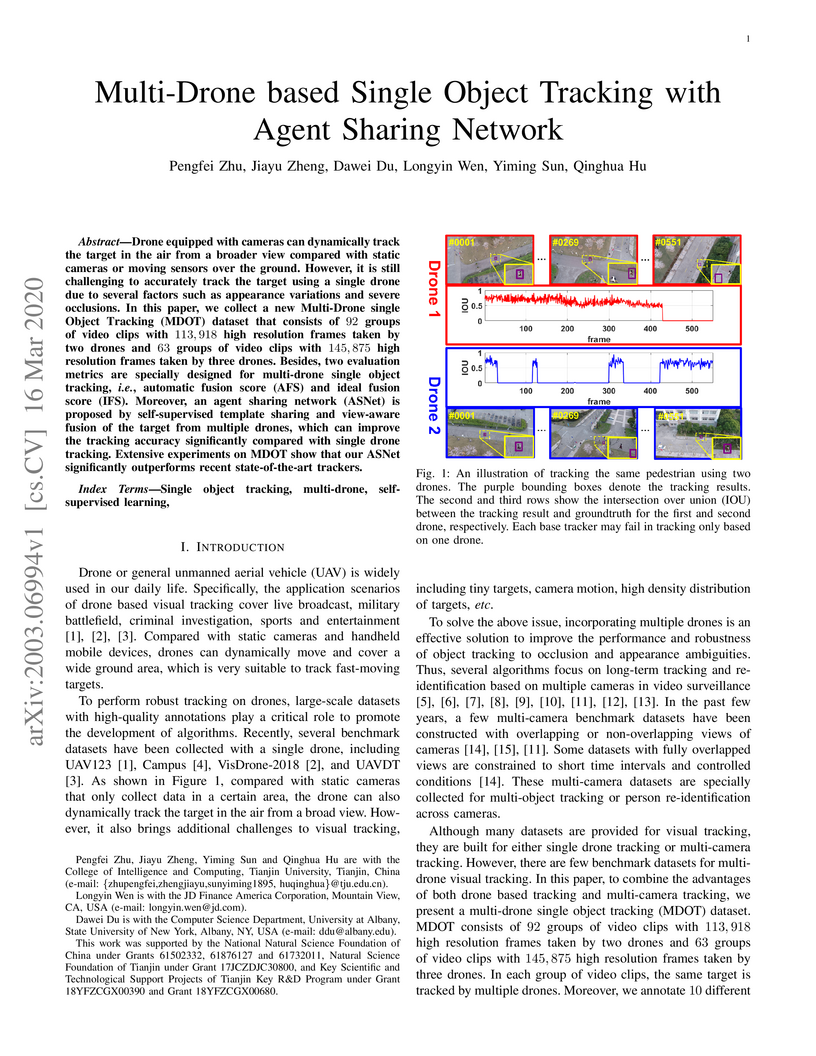
Drone equipped with cameras can dynamically track the target in the air from a broader view compared with static cameras or moving sensors over the ground. However, it is still challenging to accurately track the target using a single drone due to several factors such as appearance variations and severe occlusions. In this paper, we collect a new Multi-Drone single Object Tracking (MDOT) dataset that consists of 92 groups of video clips with 113,918 high resolution frames taken by two drones and 63 groups of video clips with 145,875 high resolution frames taken by three drones. Besides, two evaluation metrics are specially designed for multi-drone single object tracking, i.e. automatic fusion score (AFS) and ideal fusion score (IFS). Moreover, an agent sharing network (ASNet) is proposed by self-supervised template sharing and view-aware fusion of the target from multiple drones, which can improve the tracking accuracy significantly compared with single drone tracking. Extensive experiments on MDOT show that our ASNet significantly outperforms recent state-of-the-art trackers.

04 Jan 2021
Large-scale pretrained language models have shown thrilling generation capabilities, especially when they generate consistent long text in thousands of words with ease. However, users of these models can only control the prefix of sentences or certain global aspects of generated text. It is challenging to simultaneously achieve fine-grained controllability and preserve the state-of-the-art unconditional text generation capability. In this paper, we first propose a new task named "Outline to Story" (O2S) as a test bed for fine-grained controllable generation of long text, which generates a multi-paragraph story from cascaded events, i.e. a sequence of outline events that guide subsequent paragraph generation. We then create dedicate datasets for future benchmarks, built by state-of-the-art keyword extraction techniques. Finally, we propose an extremely simple yet strong baseline method for the O2S task, which fine tunes pre-trained language models on augmented sequences of outline-story pairs with simple language modeling objective. Our method does not introduce any new parameters or perform any architecture modification, except several special tokens as delimiters to build augmented sequences. Extensive experiments on various datasets demonstrate state-of-the-art conditional story generation performance with our model, achieving better fine-grained controllability and user flexibility. Our paper is among the first ones by our knowledge to propose a model and to create datasets for the task of "outline to story". Our work also instantiates research interest of fine-grained controllable generation of open-domain long text, where controlling inputs are represented by short text.
09 Aug 2021
Automated and accurate segmentation of the infected regions in computed tomography (CT) images is critical for the prediction of the pathological stage and treatment response of COVID-19. Several deep convolutional neural networks (DCNNs) have been designed for this task, whose performance, however, tends to be suppressed by their limited local receptive fields and insufficient global reasoning ability. In this paper, we propose a pixel-wise sparse graph reasoning (PSGR) module and insert it into a segmentation network to enhance the modeling of long-range dependencies for COVID-19 infected region segmentation in CT images. In the PSGR module, a graph is first constructed by projecting each pixel on a node based on the features produced by the segmentation backbone, and then converted into a sparsely-connected graph by keeping only K strongest connections to each uncertain pixel. The long-range information reasoning is performed on the sparsely-connected graph to generate enhanced features. The advantages of this module are two-fold: (1) the pixel-wise mapping strategy not only avoids imprecise pixel-to-node projections but also preserves the inherent information of each pixel for global reasoning; and (2) the sparsely-connected graph construction results in effective information retrieval and reduction of the noise propagation. The proposed solution has been evaluated against four widely-used segmentation models on three public datasets. The results show that the segmentation model equipped with our PSGR module can effectively segment COVID-19 infected regions in CT images, outperforming all other competing models.

29 Jul 2019
Semi-supervised learning is pervasive in real-world applications, where only
a few labeled data are available and large amounts of instances remain
unlabeled. Since AUC is an important model evaluation metric in classification,
directly optimizing AUC in semi-supervised learning scenario has drawn much
attention in the machine learning community. Recently, it has been shown that
one could find an unbiased solution for the semi-supervised AUC maximization
problem without knowing the class prior distribution. However, this method is
hardly scalable for nonlinear classification problems with kernels. To address
this problem, in this paper, we propose a novel scalable quadruply stochastic
gradient algorithm (QSG-S2AUC) for nonlinear semi-supervised AUC optimization.
In each iteration of the stochastic optimization process, our method randomly
samples a positive instance, a negative instance, an unlabeled instance and
their random features to compute the gradient and then update the model by
using this quadruply stochastic gradient to approach the optimal solution. More
importantly, we prove that QSG-S2AUC can converge to the optimal solution in
O(1/t), where t is the iteration number. Extensive experimental results on a
variety of benchmark datasets show that QSG-S2AUC is far more efficient than
the existing state-of-the-art algorithms for semi-supervised AUC maximization
while retaining the similar generalization performance.

02 Jan 2020
Due to a variety of motions across different frames, it is highly challenging
to learn an effective spatiotemporal representation for accurate video saliency
prediction (VSP). To address this issue, we develop an effective spatiotemporal
feature alignment network tailored to VSP, mainly including two key
sub-networks: a multi-scale deformable convolutional alignment network (MDAN)
and a bidirectional convolutional Long Short-Term Memory (Bi-ConvLSTM) network.
The MDAN learns to align the features of the neighboring frames to the
reference one in a coarse-to-fine manner, which can well handle various
motions. Specifically, the MDAN owns a pyramidal feature hierarchy structure
that first leverages deformable convolution (Dconv) to align the
lower-resolution features across frames, and then aggregates the aligned
features to align the higher-resolution features, progressively enhancing the
features from top to bottom. The output of MDAN is then fed into the
Bi-ConvLSTM for further enhancement, which captures the useful long-time
temporal information along forward and backward timing directions to
effectively guide attention orientation shift prediction under complex scene
transformation. Finally, the enhanced features are decoded to generate the
predicted saliency map. The proposed model is trained end-to-end without any
intricate post processing. Extensive evaluations on four VSP benchmark datasets
demonstrate that the proposed method achieves favorable performance against
state-of-the-art methods. The source codes and all the results will be
released.
There are no more papers matching your filters at the moment.
