
29 Dec 2024
VMamba adapts the efficient Mamba State Space Model to computer vision, introducing a 2D-Selective-Scan (SS2D) module that achieves linear computational complexity and memory consumption with image resolution. The architecture demonstrates competitive or superior performance across image classification, object detection, and semantic segmentation benchmarks compared to CNNs and Vision Transformers, while offering significantly higher throughput.

22 Jan 2024



The LanguageBind framework enables scalable N-modality pretraining by directly aligning diverse modalities (video, audio, infrared, depth) to a frozen language encoder, overcoming limitations of indirect alignment. It also presents VIDAL-10M, a 10-million-pair multi-modal dataset, achieving state-of-the-art zero-shot performance across 15 benchmarks.

22 Jul 2024

Researchers from Sun Yat-sen University and Pengcheng Lab introduce OV-DINO, a unified open-vocabulary detection method that leverages language-aware selective fusion and a novel data integration pipeline. This approach bypasses noisy pseudo-labeling and achieves state-of-the-art zero-shot and fine-tuning performance on challenging benchmarks like LVIS and COCO.

10 Mar 2025
The development of a generalist agent with adaptive multiple manipulation
skills has been a long-standing goal in the robotics community. In this paper,
we explore a crucial task, skill-incremental learning, in robotic manipulation,
which is to endow the robots with the ability to learn new manipulation skills
based on the previous learned knowledge without re-training. First, we build a
skill-incremental environment based on the RLBench benchmark, and explore how
traditional incremental methods perform in this setting. We find that they
suffer from severe catastrophic forgetting due to the previous methods on
classification overlooking the characteristics of temporality and action
complexity in robotic manipulation tasks. Towards this end, we propose an
incremental Manip}ulation framework, termed iManip, to mitigate the above
issues. We firstly design a temporal replay strategy to maintain the integrity
of old skills when learning new skill. Moreover, we propose the extendable
PerceiverIO, consisting of an action prompt with extendable weight to adapt to
new action primitives in new skill. Extensive experiments show that our
framework performs well in Skill-Incremental Learning. Codes of the
skill-incremental environment with our framework will be open-source.
16 Sep 2024




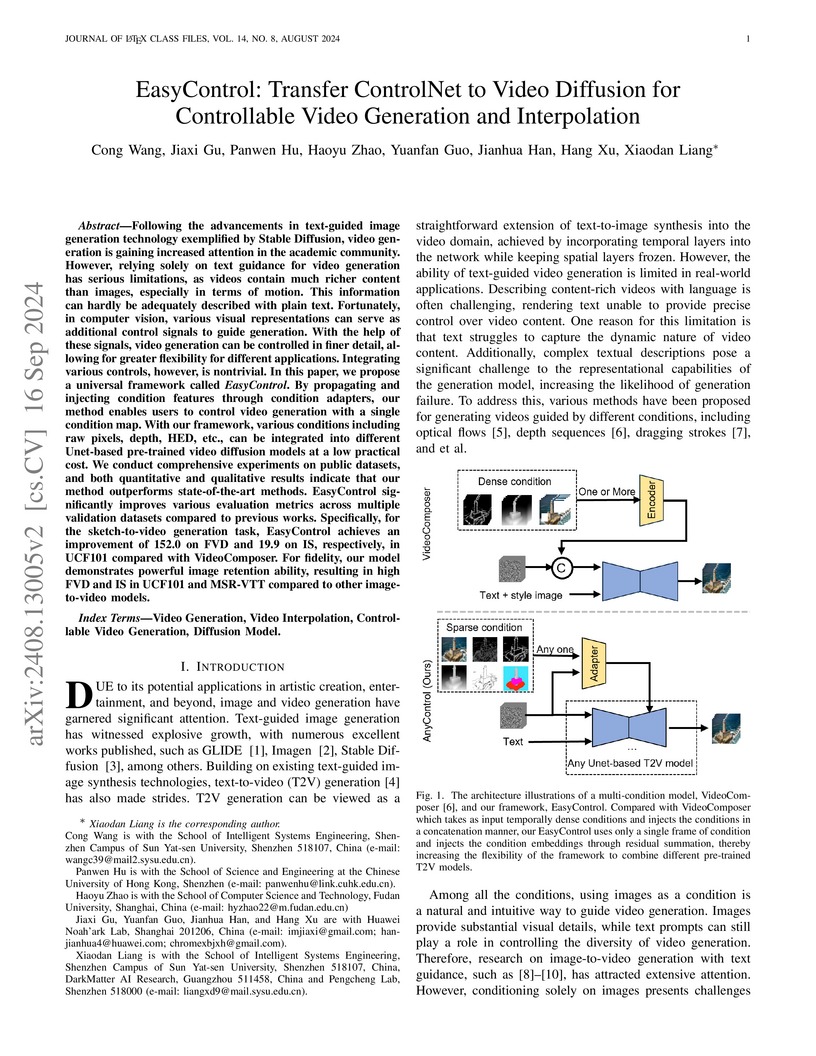
Following the advancements in text-guided image generation technology exemplified by Stable Diffusion, video generation is gaining increased attention in the academic community. However, relying solely on text guidance for video generation has serious limitations, as videos contain much richer content than images, especially in terms of motion. This information can hardly be adequately described with plain text. Fortunately, in computer vision, various visual representations can serve as additional control signals to guide generation. With the help of these signals, video generation can be controlled in finer detail, allowing for greater flexibility for different applications. Integrating various controls, however, is nontrivial. In this paper, we propose a universal framework called EasyControl. By propagating and injecting condition features through condition adapters, our method enables users to control video generation with a single condition map. With our framework, various conditions including raw pixels, depth, HED, etc., can be integrated into different Unet-based pre-trained video diffusion models at a low practical cost. We conduct comprehensive experiments on public datasets, and both quantitative and qualitative results indicate that our method outperforms state-of-the-art methods. EasyControl significantly improves various evaluation metrics across multiple validation datasets compared to previous works. Specifically, for the sketch-to-video generation task, EasyControl achieves an improvement of 152.0 on FVD and 19.9 on IS, respectively, in UCF101 compared with VideoComposer. For fidelity, our model demonstrates powerful image retention ability, resulting in high FVD and IS in UCF101 and MSR-VTT compared to other image-to-video models.
05 Jan 2024

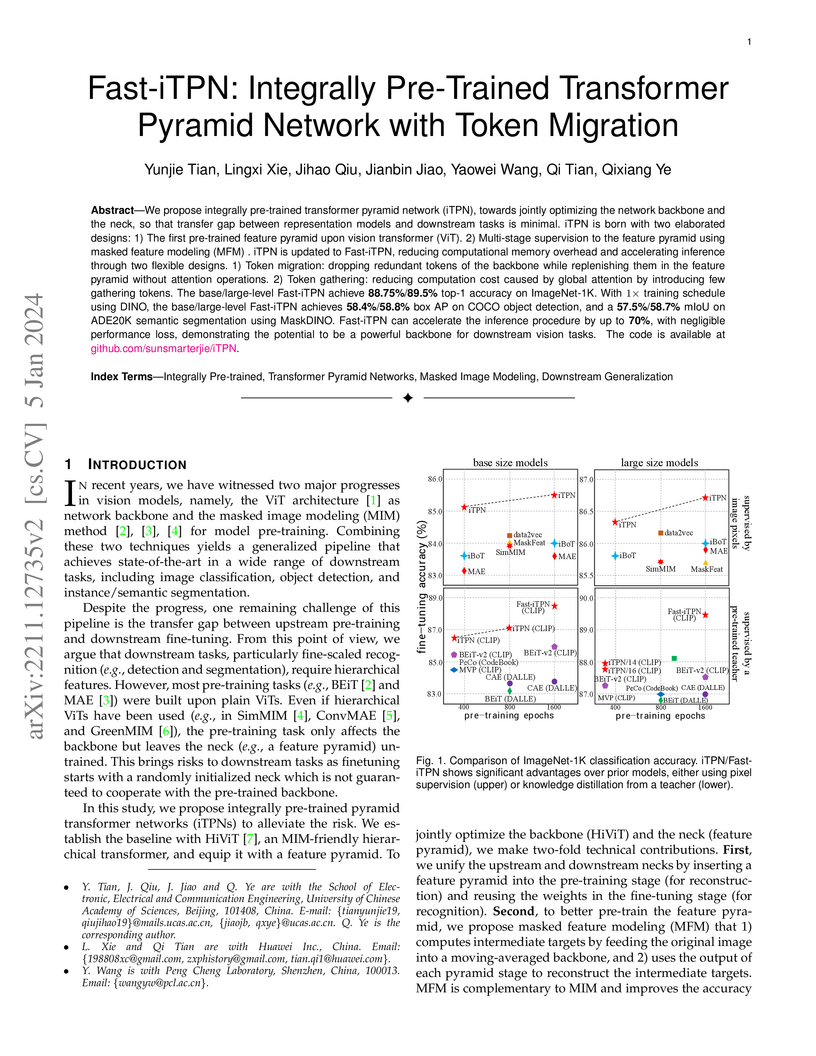
We propose integrally pre-trained transformer pyramid network (iTPN), towards jointly optimizing the network backbone and the neck, so that transfer gap between representation models and downstream tasks is minimal. iTPN is born with two elaborated designs: 1) The first pre-trained feature pyramid upon vision transformer (ViT). 2) Multi-stage supervision to the feature pyramid using masked feature modeling (MFM). iTPN is updated to Fast-iTPN, reducing computational memory overhead and accelerating inference through two flexible designs. 1) Token migration: dropping redundant tokens of the backbone while replenishing them in the feature pyramid without attention operations. 2) Token gathering: reducing computation cost caused by global attention by introducing few gathering tokens. The base/large-level Fast-iTPN achieve 88.75%/89.5% top-1 accuracy on ImageNet-1K. With 1x training schedule using DINO, the base/large-level Fast-iTPN achieves 58.4%/58.8% box AP on COCO object detection, and a 57.5%/58.7% mIoU on ADE20K semantic segmentation using MaskDINO. Fast-iTPN can accelerate the inference procedure by up to 70%, with negligible performance loss, demonstrating the potential to be a powerful backbone for downstream vision tasks. The code is available at: this http URL.

04 Sep 2024



Recent advancements in pre-trained large language models (LLMs) have significantly influenced various domains. Adapting these models for specific tasks often involves fine-tuning (FT) with private, domain-specific data. However, privacy concerns keep this data undisclosed, and the computational demands for deploying LLMs pose challenges for resource-limited data holders. This has sparked interest in split learning (SL), a Model-as-a-Service (MaaS) paradigm that divides LLMs into smaller segments for distributed training and deployment, transmitting only intermediate activations instead of raw data. SL has garnered substantial interest in both industry and academia as it aims to balance user data privacy, model ownership, and resource challenges in the private fine-tuning of LLMs. Despite its privacy claims, this paper reveals significant vulnerabilities arising from the combination of SL and LLM-FT: the Not-too-far property of fine-tuning and the auto-regressive nature of LLMs. Exploiting these vulnerabilities, we propose Bidirectional Semi-white-box Reconstruction (BiSR), the first data reconstruction attack (DRA) designed to target both the forward and backward propagation processes of SL. BiSR utilizes pre-trained weights as prior knowledge, combining a learning-based attack with a bidirectional optimization-based approach for highly effective data reconstruction. Additionally, it incorporates a Noise-adaptive Mixture of Experts (NaMoE) model to enhance reconstruction performance under perturbation. We conducted systematic experiments on various mainstream LLMs and different setups, empirically demonstrating BiSR's state-of-the-art performance. Furthermore, we thoroughly examined three representative defense mechanisms, showcasing our method's capability to reconstruct private data even in the presence of these defenses.

23 Nov 2025

Out-of-distribution (OOD) generalization has emerged as a significant challenge in graph recommender systems. Traditional graph neural network algorithms often fail because they learn spurious environmental correlations instead of stable causal relationships, leading to substantial performance degradation under distribution shifts. While recent advancements in Large Language Models (LLMs) offer a promising avenue due to their vast world knowledge and reasoning capabilities, effectively integrating this knowledge with the fine-grained topology of specific graphs to solve the OOD problem remains a significant challenge. To address these issues, we propose {ariant raph ontrastive Learning with s for Out-of-Distribution Recommendation (InvGCLLM)}, an innovative causal learning framework that synergistically integrates the strengths of data-driven models and knowledge-driven LLMs. Our framework first employs a data-driven invariant learning model to generate causal confidence scores for each user-item interaction. These scores then guide an LLM to perform targeted graph refinement, leveraging its world knowledge to prune spurious connections and augment missing causal links. Finally, the structurally purified graphs provide robust supervision for a causality-guided contrastive learning objective, enabling the model to learn representations that are resilient to spurious correlations. Experiments conducted on four public datasets demonstrate that InvGCLLM achieves significant improvements in out-of-distribution recommendation, consistently outperforming state-of-the-art baselines.
05 Feb 2024
In the 6G era, real-time radio resource monitoring and management are urged to support diverse wireless-empowered applications. This calls for fast and accurate estimation on the distribution of the radio resources, which is usually represented by the spatial signal power strength over the geographical environment, known as a radio map. In this paper, we present a cooperative radio map estimation (CRME) approach enabled by the generative adversarial network (GAN), called as GAN-CRME, which features fast and accurate radio map estimation without the transmitters' information. The radio map is inferred by exploiting the interaction between distributed received signal strength (RSS) measurements at mobile users and the geographical map using a deep neural network estimator, resulting in low data-acquisition cost and computational complexity. Moreover, a GAN-based learning algorithm is proposed to boost the inference capability of the deep neural network estimator by exploiting the power of generative AI. Simulation results showcase that the proposed GAN-CRME is even capable of coarse error-correction when the geographical map information is inaccurate.
15 Jul 2024

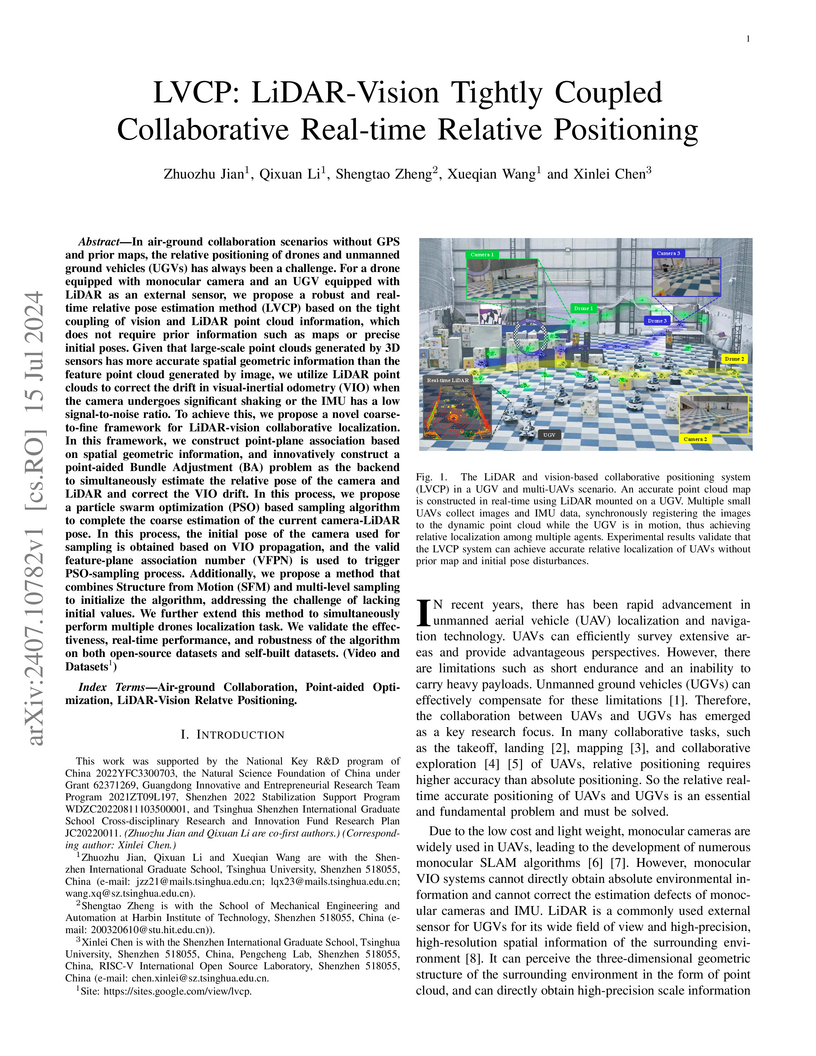
In air-ground collaboration scenarios without GPS and prior maps, the
relative positioning of drones and unmanned ground vehicles (UGVs) has always
been a challenge. For a drone equipped with monocular camera and an UGV
equipped with LiDAR as an external sensor, we propose a robust and real-time
relative pose estimation method (LVCP) based on the tight coupling of vision
and LiDAR point cloud information, which does not require prior information
such as maps or precise initial poses. Given that large-scale point clouds
generated by 3D sensors has more accurate spatial geometric information than
the feature point cloud generated by image, we utilize LiDAR point clouds to
correct the drift in visual-inertial odometry (VIO) when the camera undergoes
significant shaking or the IMU has a low signal-to-noise ratio. To achieve
this, we propose a novel coarse-to-fine framework for LiDAR-vision
collaborative localization. In this framework, we construct point-plane
association based on spatial geometric information, and innovatively construct
a point-aided Bundle Adjustment (BA) problem as the backend to simultaneously
estimate the relative pose of the camera and LiDAR and correct the VIO drift.
In this process, we propose a particle swarm optimization (PSO) based sampling
algorithm to complete the coarse estimation of the current camera-LiDAR pose.
In this process, the initial pose of the camera used for sampling is obtained
based on VIO propagation, and the valid feature-plane association number (VFPN)
is used to trigger PSO-sampling process. Additionally, we propose a method that
combines Structure from Motion (SFM) and multi-level sampling to initialize the
algorithm, addressing the challenge of lacking initial values.
03 Jan 2024
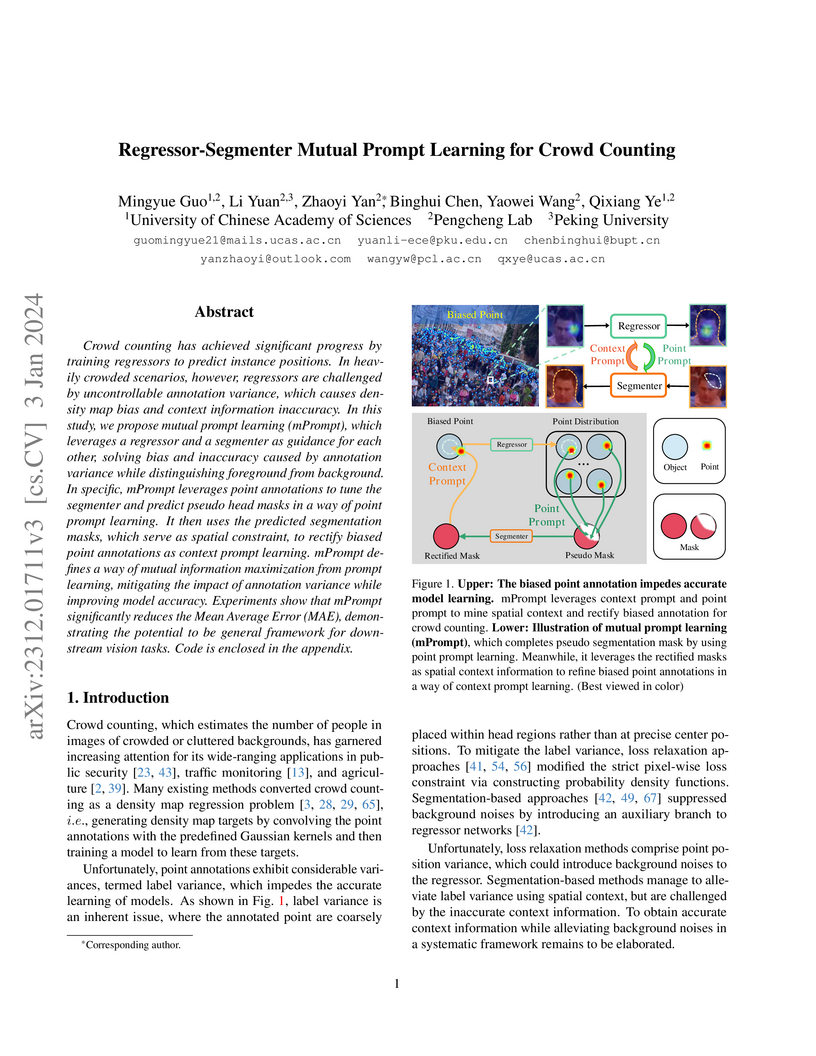
Crowd counting has achieved significant progress by training regressors to predict instance positions. In heavily crowded scenarios, however, regressors are challenged by uncontrollable annotation variance, which causes density map bias and context information inaccuracy. In this study, we propose mutual prompt learning (mPrompt), which leverages a regressor and a segmenter as guidance for each other, solving bias and inaccuracy caused by annotation variance while distinguishing foreground from background. In specific, mPrompt leverages point annotations to tune the segmenter and predict pseudo head masks in a way of point prompt learning. It then uses the predicted segmentation masks, which serve as spatial constraint, to rectify biased point annotations as context prompt learning. mPrompt defines a way of mutual information maximization from prompt learning, mitigating the impact of annotation variance while improving model accuracy. Experiments show that mPrompt significantly reduces the Mean Average Error (MAE), demonstrating the potential to be general framework for down-stream vision tasks.

29 Nov 2023
Wheeled robot navigation has been widely used in urban environments, but
little research has been conducted on its navigation in wild vegetation.
External sensors (LiDAR, camera etc.) are often used to construct point cloud
map of the surrounding environment, however, the supporting rigid ground used
for travelling cannot be detected due to the occlusion of vegetation. This
often causes unsafe or not smooth path during planning process. To address the
drawback, we propose the PE-RRT* algorithm, which effectively combines a novel
support plane estimation method and sampling algorithm to generate real-time
feasible and safe path in vegetation environments. In order to accurately
estimate the support plane, we combine external perception and proprioception,
and use Multivariate Gaussian Processe Regression (MV-GPR) to estimate the
terrain at the sampling nodes. We build a physical experimental platform and
conduct experiments in different outdoor environments. Experimental results
show that our method has high safety, robustness and generalization.
03 Jul 2025
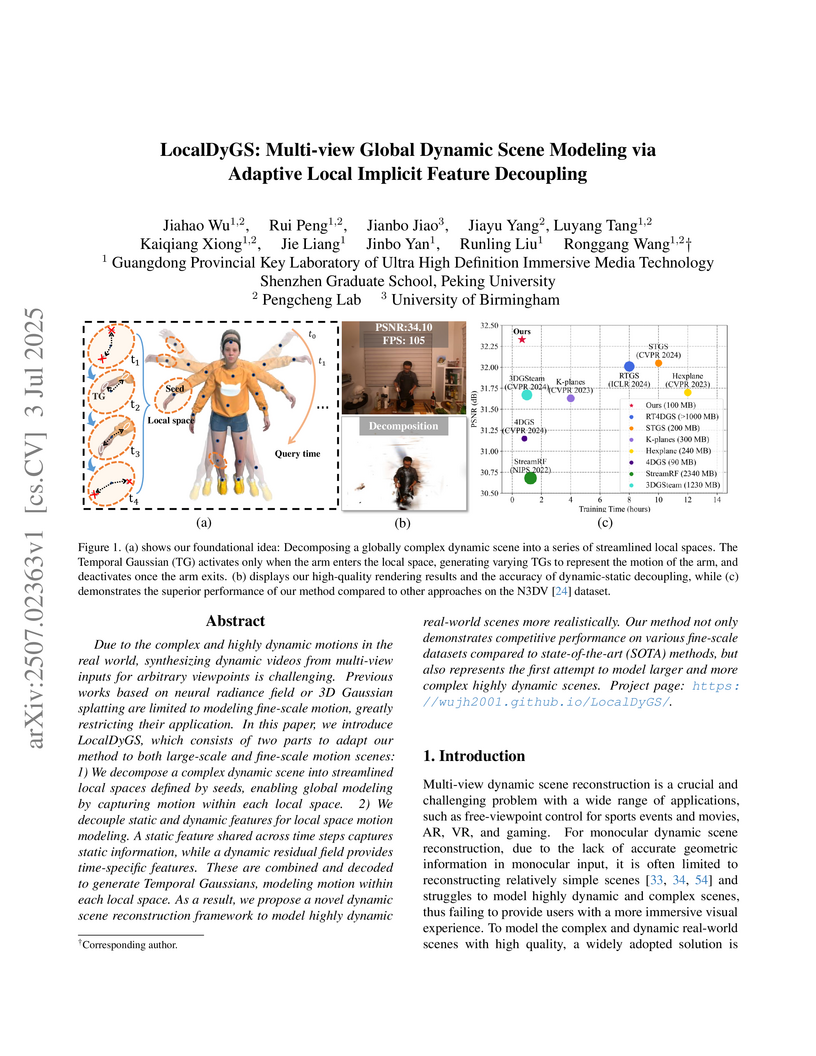
Due to the complex and highly dynamic motions in the real world, synthesizing dynamic videos from multi-view inputs for arbitrary viewpoints is challenging. Previous works based on neural radiance field or 3D Gaussian splatting are limited to modeling fine-scale motion, greatly restricting their application. In this paper, we introduce LocalDyGS, which consists of two parts to adapt our method to both large-scale and fine-scale motion scenes: 1) We decompose a complex dynamic scene into streamlined local spaces defined by seeds, enabling global modeling by capturing motion within each local space. 2) We decouple static and dynamic features for local space motion modeling. A static feature shared across time steps captures static information, while a dynamic residual field provides time-specific features. These are combined and decoded to generate Temporal Gaussians, modeling motion within each local space. As a result, we propose a novel dynamic scene reconstruction framework to model highly dynamic real-world scenes more realistically. Our method not only demonstrates competitive performance on various fine-scale datasets compared to state-of-the-art (SOTA) methods, but also represents the first attempt to model larger and more complex highly dynamic scenes. Project page: this https URL.

13 Feb 2023

We focus on addressing the dense backward propagation issue for training efficiency of N:M fine-grained sparsity that preserves at most N out of M consecutive weights and achieves practical speedups supported by the N:M sparse tensor core. Therefore, we present a novel method of Bi-directional Masks (Bi-Mask) with its two central innovations in: 1) Separate sparse masks in the two directions of forward and backward propagation to obtain training acceleration. It disentangles the forward and backward weight sparsity and overcomes the very dense gradient computation. 2) An efficient weight row permutation method to maintain performance. It picks up the permutation candidate with the most eligible N:M weight blocks in the backward to minimize the gradient gap between traditional uni-directional masks and our bi-directional masks. Compared with existing uni-directional scenario that applies a transposable mask and enables backward acceleration, our Bi-Mask is experimentally demonstrated to be more superior in performance. Also, our Bi-Mask performs on par with or even better than methods that fail to achieve backward acceleration. Project of this paper is available at \url{this https URL}.

01 Apr 2020
Occluded person re-identification is a challenging task as the appearance
varies substantially with various obstacles, especially in the crowd scenario.
To address this issue, we propose a Pose-guided Visible Part Matching (PVPM)
method that jointly learns the discriminative features with pose-guided
attention and self-mines the part visibility in an end-to-end framework.
Specifically, the proposed PVPM includes two key components: 1) pose-guided
attention (PGA) method for part feature pooling that exploits more
discriminative local features; 2) pose-guided visibility predictor (PVP) that
estimates whether a part suffers the occlusion or not. As there are no ground
truth training annotations for the occluded part, we turn to utilize the
characteristic of part correspondence in positive pairs and self-mining the
correspondence scores via graph matching. The generated correspondence scores
are then utilized as pseudo-labels for visibility predictor (PVP). Experimental
results on three reported occluded benchmarks show that the proposed method
achieves competitive performance to state-of-the-art methods. The source codes
are available at this https URL

31 May 2019
Eliciting labels from crowds is a potential way to obtain large labeled data.
Despite a variety of methods developed for learning from crowds, a key
challenge remains unsolved: \emph{learning from crowds without knowing the
information structure among the crowds a priori, when some people of the crowds
make highly correlated mistakes and some of them label effortlessly (e.g.
randomly)}. We propose an information theoretic approach, Max-MIG, for joint
learning from crowds, with a common assumption: the crowdsourced labels and the
data are independent conditioning on the ground truth. Max-MIG simultaneously
aggregates the crowdsourced labels and learns an accurate data classifier.
Furthermore, we devise an accurate data-crowds forecaster that employs both the
data and the crowdsourced labels to forecast the ground truth. To the best of
our knowledge, this is the first algorithm that solves the aforementioned
challenge of learning from crowds. In addition to the theoretical validation,
we also empirically show that our algorithm achieves the new state-of-the-art
results in most settings, including the real-world data, and is the first
algorithm that is robust to various information structures. Codes are available
at
\hyperlink{https://github.com/Newbeeer/Max-MIG}{this https URL}

04 Feb 2023
Moire patterns appear frequently when taking photos of digital screens, drastically degrading the image quality. Despite the advance of CNNs in image demoireing, existing networks are with heavy design, causing redundant computation burden for mobile devices. In this paper, we launch the first study on accelerating demoireing networks and propose a dynamic demoireing acceleration method (DDA) towards a real-time deployment on mobile devices. Our stimulus stems from a simple-yet-universal fact that moire patterns often unbalancedly distribute across an image. Consequently, excessive computation is wasted upon non-moire areas. Therefore, we reallocate computation costs in proportion to the complexity of image patches. In order to achieve this aim, we measure the complexity of an image patch by designing a novel moire prior that considers both colorfulness and frequency information of moire patterns. Then, we restore image patches with higher-complexity using larger networks and the ones with lower-complexity are assigned with smaller networks to relieve the computation burden. At last, we train all networks in a parameter-shared supernet paradigm to avoid additional parameter burden. Extensive experiments on several benchmarks demonstrate the efficacy of our proposed DDA. In addition, the acceleration evaluated on the VIVO X80 Pro smartphone equipped with a chip of Snapdragon 8 Gen 1 shows that our method can drastically reduce the inference time, leading to a real-time image demoireing on mobile devices. Source codes and models are released at this https URL
13 Sep 2020
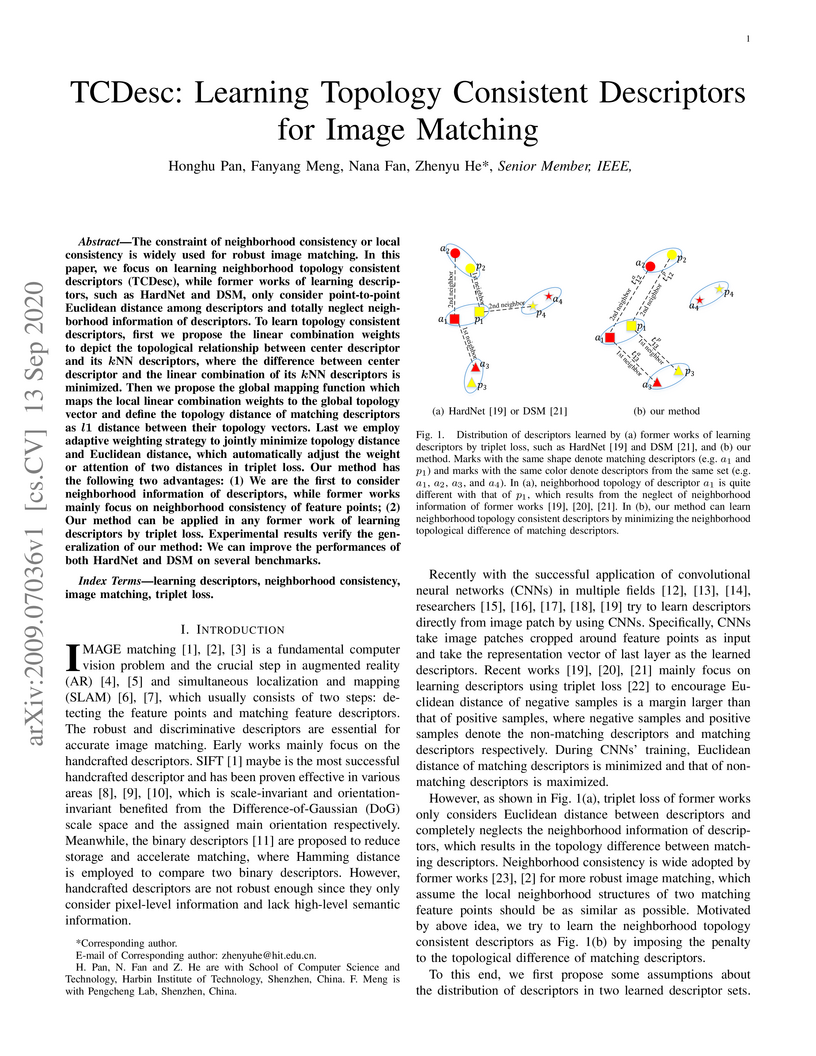
The constraint of neighborhood consistency or local consistency is widely
used for robust image matching. In this paper, we focus on learning
neighborhood topology consistent descriptors (TCDesc), while former works of
learning descriptors, such as HardNet and DSM, only consider point-to-point
Euclidean distance among descriptors and totally neglect neighborhood
information of descriptors. To learn topology consistent descriptors, first we
propose the linear combination weights to depict the topological relationship
between center descriptor and its kNN descriptors, where the difference between
center descriptor and the linear combination of its kNN descriptors is
minimized. Then we propose the global mapping function which maps the local
linear combination weights to the global topology vector and define the
topology distance of matching descriptors as l1 distance between their topology
vectors. Last we employ adaptive weighting strategy to jointly minimize
topology distance and Euclidean distance, which automatically adjust the weight
or attention of two distances in triplet loss. Our method has the following two
advantages: (1) We are the first to consider neighborhood information of
descriptors, while former works mainly focus on neighborhood consistency of
feature points; (2) Our method can be applied in any former work of learning
descriptors by triplet loss. Experimental results verify the generalization of
our method: We can improve the performances of both HardNet and DSM on several
benchmarks.

21 Nov 2021
Tensor Decomposition Networks (TDNs) prevail for their inherent compact
architectures. To give more researchers a flexible way to exploit TDNs, we
present a Pytorch toolkit named TedNet. TedNet implements 5 kinds of tensor
decomposition(i.e., CANDECOMP/PARAFAC (CP), Block-Term Tucker (BTT), Tucker-2,
Tensor Train (TT) and Tensor Ring (TR) on traditional deep neural layers, the
convolutional layer and the fully-connected layer. By utilizing the basic
layers, it is simple to construct a variety of TDNs. TedNet is available at
this https URL
11 Jan 2024
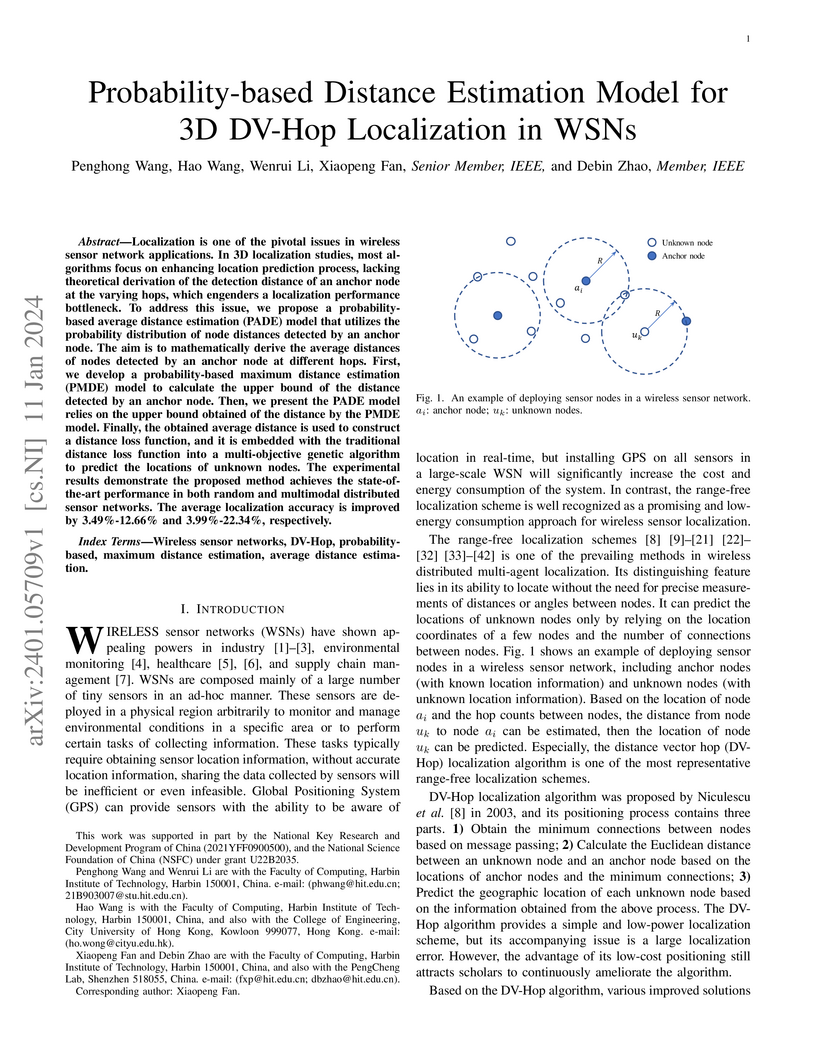
Localization is one of the pivotal issues in wireless sensor network
applications. In 3D localization studies, most algorithms focus on enhancing
the location prediction process, lacking theoretical derivation of the
detection distance of an anchor node at the varying hops, engenders a
localization performance bottleneck. To address this issue, we propose a
probability-based average distance estimation (PADE) model that utilizes the
probability distribution of node distances detected by an anchor node. The aim
is to mathematically derive the average distances of nodes detected by an
anchor node at different hops. First, we develop a probability-based maximum
distance estimation (PMDE) model to calculate the upper bound of the distance
detected by an anchor node. Then, we present the PADE model, which relies on
the upper bound obtained of the distance by the PMDE model. Finally, the
obtained average distance is used to construct a distance loss function, and it
is embedded with the traditional distance loss function into a multi-objective
genetic algorithm to predict the locations of unknown nodes. The experimental
results demonstrate that the proposed method achieves state-of-the-art
performance in random and multimodal distributed sensor networks. The average
localization accuracy is improved by 3.49\%-12.66\% and 3.99%-22.34%,
respectively.
There are no more papers matching your filters at the moment.
