
07 Sep 2020



To achieve a successful grasp, gripper attributes such as its geometry and kinematics play a role as important as the object geometry. The majority of previous work has focused on developing grasp methods that generalize over novel object geometry but are specific to a certain robot hand. We propose UniGrasp, an efficient data-driven grasp synthesis method that considers both the object geometry and gripper attributes as inputs. UniGrasp is based on a novel deep neural network architecture that selects sets of contact points from the input point cloud of the object. The proposed model is trained on a large dataset to produce contact points that are in force closure and reachable by the robot hand. By using contact points as output, we can transfer between a diverse set of multifingered robotic hands. Our model produces over 90% valid contact points in Top10 predictions in simulation and more than 90% successful grasps in real world experiments for various known two-fingered and three-fingered grippers. Our model also achieves 93%, 83% and 90% successful grasps in real world experiments for an unseen two-fingered gripper and two unseen multi-fingered anthropomorphic robotic hands.

29 May 2023
PD-MORL develops an algorithm that trains a single universal network to generate Pareto-optimal policies for any given preference vector at run-time. It yields broader and denser Pareto fronts with an order of magnitude fewer parameters across discrete and continuous control tasks compared to multi-policy baselines, addressing the challenge of dynamic adaptation and scalability in multi-objective reinforcement learning.
15 Apr 2019

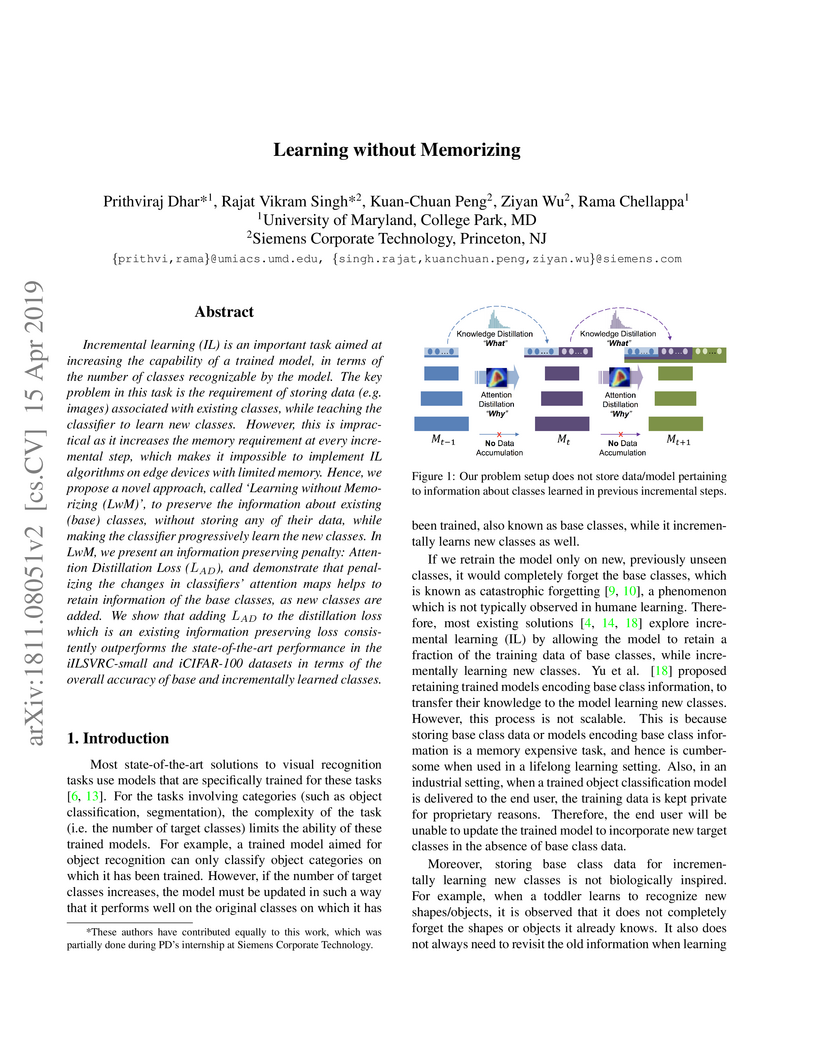
Incremental learning (IL) is an important task aimed at increasing the capability of a trained model, in terms of the number of classes recognizable by the model. The key problem in this task is the requirement of storing data (e.g. images) associated with existing classes, while teaching the classifier to learn new classes. However, this is impractical as it increases the memory requirement at every incremental step, which makes it impossible to implement IL algorithms on edge devices with limited memory. Hence, we propose a novel approach, called `Learning without Memorizing (LwM)', to preserve the information about existing (base) classes, without storing any of their data, while making the classifier progressively learn the new classes. In LwM, we present an information preserving penalty: Attention Distillation Loss (), and demonstrate that penalizing the changes in classifiers' attention maps helps to retain information of the base classes, as new classes are added. We show that adding to the distillation loss which is an existing information preserving loss consistently outperforms the state-of-the-art performance in the iILSVRC-small and iCIFAR-100 datasets in terms of the overall accuracy of base and incrementally learned classes.
10 May 2019
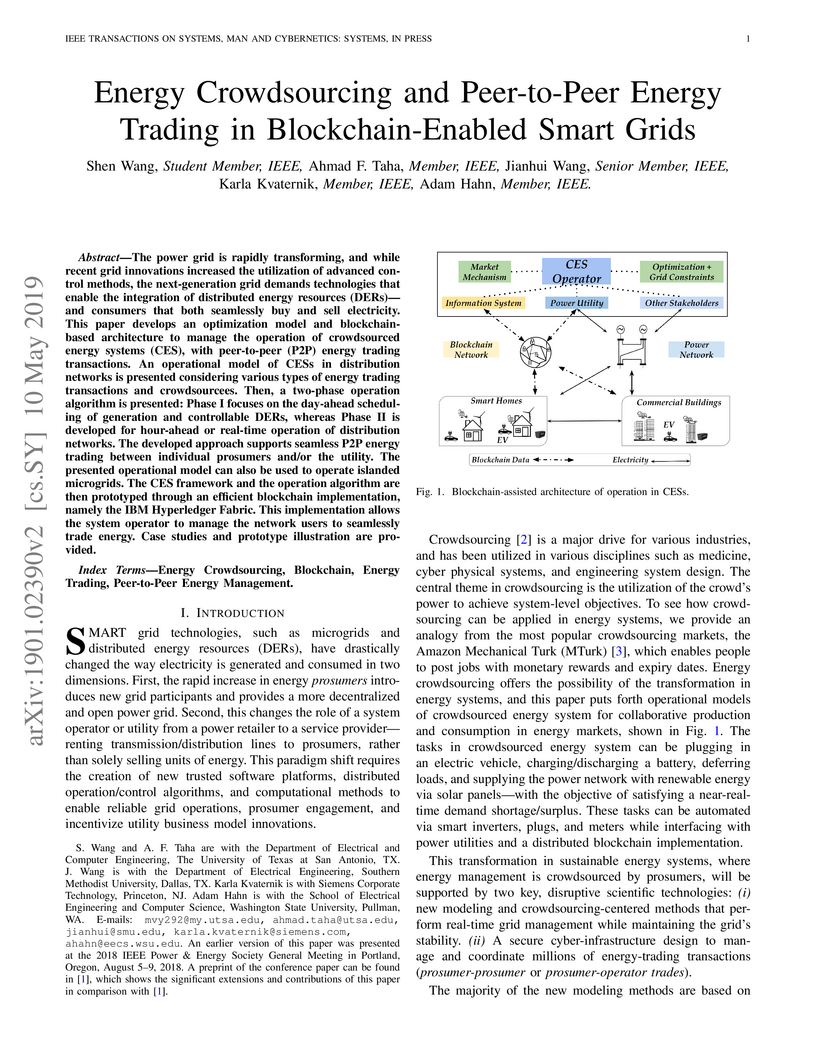
The power grid is rapidly transforming, and while recent grid innovations
increased the utilization of advanced control methods, the next-generation grid
demands technologies that enable the integration of distributed energy
resources (DERs)---and consumers that both seamlessly buy and sell electricity.
This paper develops an optimization model and blockchain-based architecture to
manage the operation of crowdsourced energy systems (CES), with peer-to-peer
(P2P) energy trading transactions. An operational model of CESs in distribution
networks is presented considering various types of energy trading transactions
and crowdsourcees. Then, a two-phase operation algorithm is presented: Phase I
focuses on the day-ahead scheduling of generation and controllable DERs,
whereas Phase II is developed for hour-ahead or real-time operation of
distribution networks. The developed approach supports seamless P2P energy
trading between individual prosumers and/or the utility. The presented
operational model can also be used to operate islanded microgrids. The CES
framework and the operation algorithm are then prototyped through an efficient
blockchain implementation, namely the IBM Hyperledger Fabric. This
implementation allows the system operator to manage the network users to
seamlessly trade energy. Case studies and prototype illustration are provided.

01 Mar 2024

In this paper, we introduce Symplectic ODE-Net (SymODEN), a deep learning framework which can infer the dynamics of a physical system, given by an ordinary differential equation (ODE), from observed state trajectories. To achieve better generalization with fewer training samples, SymODEN incorporates appropriate inductive bias by designing the associated computation graph in a physics-informed manner. In particular, we enforce Hamiltonian dynamics with control to learn the underlying dynamics in a transparent way, which can then be leveraged to draw insight about relevant physical aspects of the system, such as mass and potential energy. In addition, we propose a parametrization which can enforce this Hamiltonian formalism even when the generalized coordinate data is embedded in a high-dimensional space or we can only access velocity data instead of generalized momentum. This framework, by offering interpretable, physically-consistent models for physical systems, opens up new possibilities for synthesizing model-based control strategies.
04 Jul 2019

Datasets to study the temporal evolution of graphs are scarce. To encourage the research of novel dynamic graph learning algorithms we introduce YoutubeGraph-Dyn (available at this https URL), an evolving graph dataset generated from YouTube real-world interactions. YoutubeGraph-Dyn provides intra-day time granularity (with 416 snapshots taken every 6 hours for a period of 104 days), multi-modal relationships that capture different aspects of the data, multiple attributes including timestamped, non-timestamped, word embeddings, and integers. Our data collection methodology emphasizes the creation of time evolving graphs from non-timestamped data. In this paper, we provide various graph statistics of YoutubeGraph-Dyn and test state-of-the-art graph clustering algorithms to detect community migration, and time series analysis and recurrent neural network algorithms to forecast non-timestamped data.

14 Aug 2021

Deep generative models are proven to be a useful tool for automatic design
synthesis and design space exploration. When applied in engineering design,
existing generative models face three challenges: 1) generated designs lack
diversity and do not cover all areas of the design space, 2) it is difficult to
explicitly improve the overall performance or quality of generated designs, and
3) existing models generally do not generate novel designs, outside the domain
of the training data. In this paper, we simultaneously address these challenges
by proposing a new Determinantal Point Processes based loss function for
probabilistic modeling of diversity and quality. With this new loss function,
we develop a variant of the Generative Adversarial Network, named "Performance
Augmented Diverse Generative Adversarial Network" or PaDGAN, which can generate
novel high-quality designs with good coverage of the design space. Using three
synthetic examples and one real-world airfoil design example, we demonstrate
that PaDGAN can generate diverse and high-quality designs. In comparison to a
vanilla Generative Adversarial Network, on average, it generates samples with a
28% higher mean quality score with larger diversity and without the mode
collapse issue. Unlike typical generative models that usually generate new
designs by interpolating within the boundary of training data, we show that
PaDGAN expands the design space boundary outside the training data towards
high-quality regions. The proposed method is broadly applicable to many tasks
including design space exploration, design optimization, and creative solution
recommendation.
09 May 2018
Finding correspondences between images or 3D scans is at the heart of many
computer vision and image retrieval applications and is often enabled by
matching local keypoint descriptors. Various learning approaches have been
applied in the past to different stages of the matching pipeline, considering
detector, descriptor, or metric learning objectives. These objectives were
typically addressed separately and most previous work has focused on image
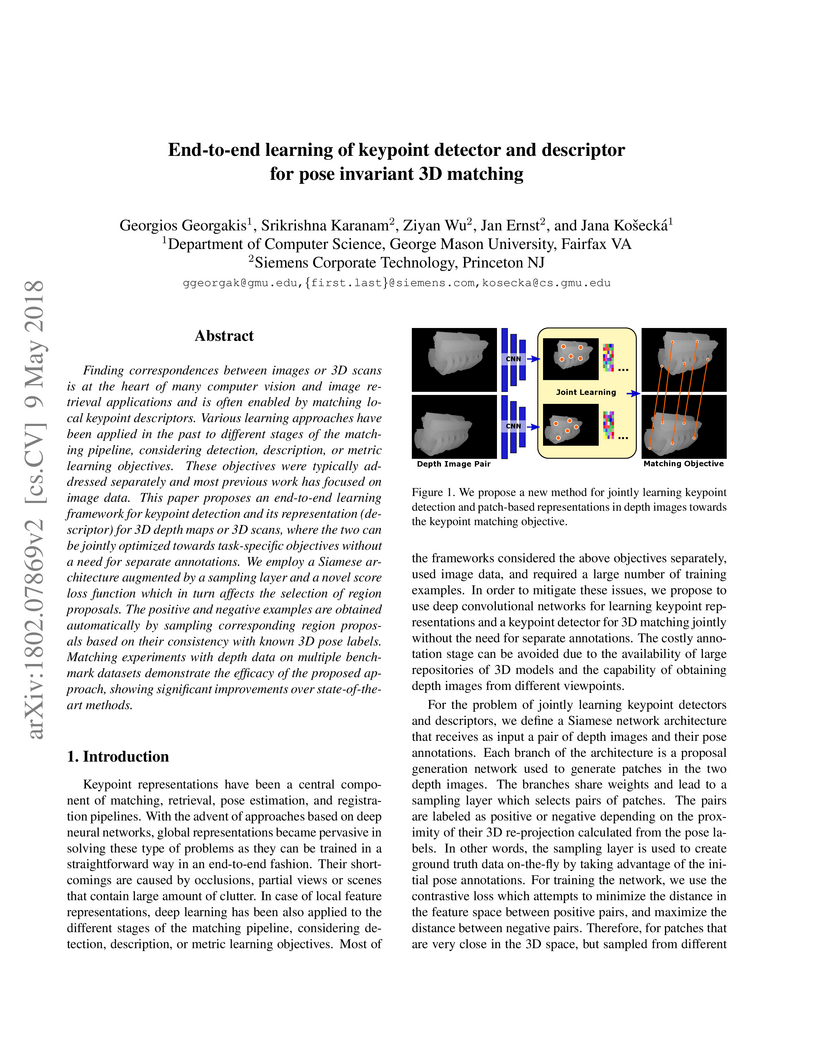
data. This paper proposes an end-to-end learning framework for keypoint
detection and its representation (descriptor) for 3D depth maps or 3D scans,
where the two can be jointly optimized towards task-specific objectives without
a need for separate annotations. We employ a Siamese architecture augmented by
a sampling layer and a novel score loss function which in turn affects the
selection of region proposals. The positive and negative examples are obtained
automatically by sampling corresponding region proposals based on their
consistency with known 3D pose labels. Matching experiments with depth data on
multiple benchmark datasets demonstrate the efficacy of the proposed approach,
showing significant improvements over state-of-the-art methods.

14 Oct 2021

With vast amounts of video content being uploaded to the Internet every minute, video summarization becomes critical for efficient browsing, searching, and indexing of visual content. Nonetheless, the spread of social and egocentric cameras creates an abundance of sparse scenarios captured by several devices, and ultimately required to be jointly summarized. In this paper, we discuss the problem of summarizing videos recorded independently by several dynamic cameras that intermittently share the field of view. We present a robust framework that (a) identifies a diverse set of important events among moving cameras that often are not capturing the same scene, and (b) selects the most representative view(s) at each event to be included in a universal summary. Due to the lack of an applicable alternative, we collected a new multi-view egocentric dataset, Multi-Ego. Our dataset is recorded simultaneously by three cameras, covering a wide variety of real-life scenarios. The footage is annotated by multiple individuals under various summarization configurations, with a consensus analysis ensuring a reliable ground truth. We conduct extensive experiments on the compiled dataset in addition to three other standard benchmarks that show the robustness and the advantage of our approach in both supervised and unsupervised settings. Additionally, we show that our approach learns collectively from data of varied number-of-views and orthogonal to other summarization methods, deeming it scalable and generic.
02 Jul 2019
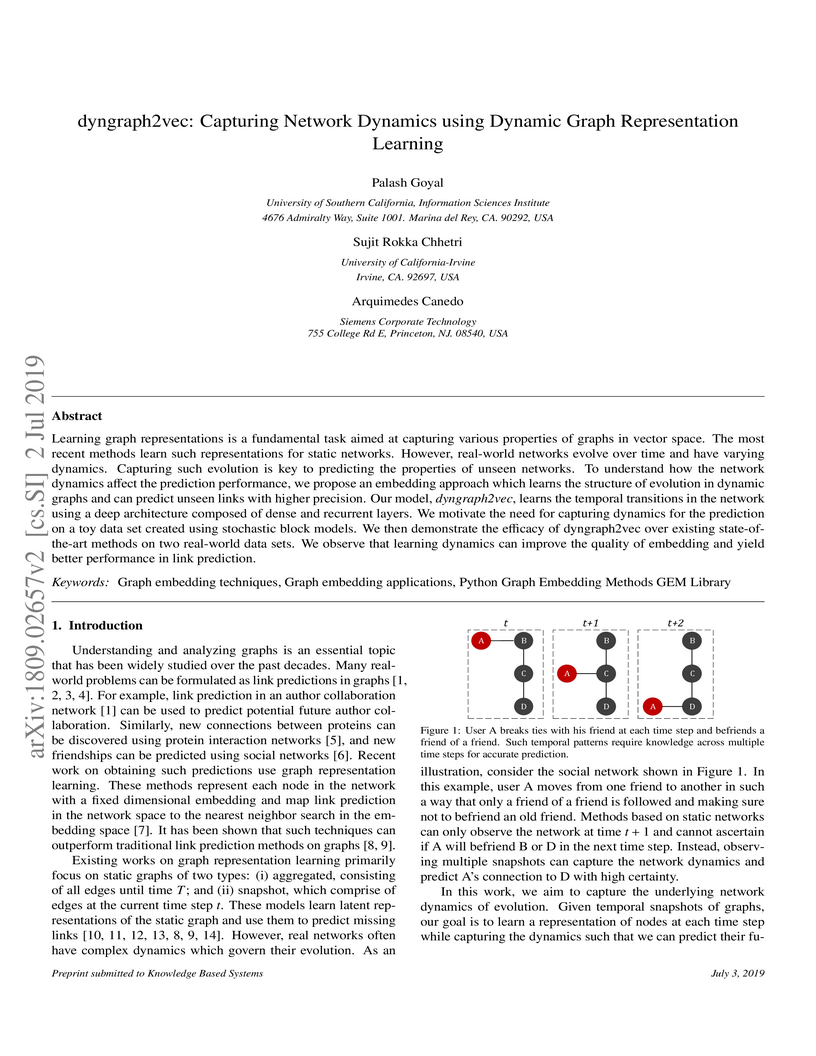
Learning graph representations is a fundamental task aimed at capturing various properties of graphs in vector space. The most recent methods learn such representations for static networks. However, real world networks evolve over time and have varying dynamics. Capturing such evolution is key to predicting the properties of unseen networks. To understand how the network dynamics affect the prediction performance, we propose an embedding approach which learns the structure of evolution in dynamic graphs and can predict unseen links with higher precision. Our model, dyngraph2vec, learns the temporal transitions in the network using a deep architecture composed of dense and recurrent layers. We motivate the need of capturing dynamics for prediction on a toy data set created using stochastic block models. We then demonstrate the efficacy of dyngraph2vec over existing state-of-the-art methods on two real world data sets. We observe that learning dynamics can improve the quality of embedding and yield better performance in link prediction.

07 Jun 2021
Engineering design tasks often require synthesizing new designs that meet
desired performance requirements. The conventional design process, which
requires iterative optimization and performance evaluation, is slow and
dependent on initial designs. Past work has used conditional generative
adversarial networks (cGANs) to enable direct design synthesis for given target
performances. However, most existing cGANs are restricted to categorical
conditions. Recent work on Continuous conditional GAN (CcGAN) tries to address
this problem, but still faces two challenges: 1) it performs poorly on
non-uniform performance distributions, and 2) the generated designs may not
cover the entire design space. We propose a new model, named Performance
Conditioned Diverse Generative Adversarial Network (PcDGAN), which introduces a
singular vicinal loss combined with a Determinantal Point Processes (DPP) based
loss function to enhance diversity. PcDGAN uses a new self-reinforcing score
called the Lambert Log Exponential Transition Score (LLETS) for improved
conditioning. Experiments on synthetic problems and a real-world airfoil design
problem demonstrate that PcDGAN outperforms state-of-the-art GAN models and
improves the conditioning likelihood by 69% in an airfoil generation task and
up to 78% in synthetic conditional generation tasks and achieves greater design
space coverage. The proposed method enables efficient design synthesis and
design space exploration with applications ranging from CAD model generation to
metamaterial selection.

24 May 2021


Existing approaches for open-domain question answering (QA) are typically designed for questions that require either single-hop or multi-hop reasoning, which make strong assumptions of the complexity of questions to be answered. Also, multi-step document retrieval often incurs higher number of relevant but non-supporting documents, which dampens the downstream noise-sensitive reader module for answer extraction. To address these challenges, we propose a unified QA framework to answer any-hop open-domain questions, which iteratively retrieves, reranks and filters documents, and adaptively determines when to stop the retrieval process. To improve the retrieval accuracy, we propose a graph-based reranking model that perform multi-document interaction as the core of our iterative reranking framework. Our method consistently achieves performance comparable to or better than the state-of-the-art on both single-hop and multi-hop open-domain QA datasets, including Natural Questions Open, SQuAD Open, and HotpotQA.

02 Jan 2020
We propose a novel method for automatic reasoning on knowledge graphs based on debate dynamics. The main idea is to frame the task of triple classification as a debate game between two reinforcement learning agents which extract arguments -- paths in the knowledge graph -- with the goal to promote the fact being true (thesis) or the fact being false (antithesis), respectively. Based on these arguments, a binary classifier, called the judge, decides whether the fact is true or false. The two agents can be considered as sparse, adversarial feature generators that present interpretable evidence for either the thesis or the antithesis. In contrast to other black-box methods, the arguments allow users to get an understanding of the decision of the judge. Since the focus of this work is to create an explainable method that maintains a competitive predictive accuracy, we benchmark our method on the triple classification and link prediction task. Thereby, we find that our method outperforms several baselines on the benchmark datasets FB15k-237, WN18RR, and Hetionet. We also conduct a survey and find that the extracted arguments are informative for users.
28 Feb 2020

Recent studies on open-domain question answering have achieved prominent
performance improvement using pre-trained language models such as BERT.
State-of-the-art approaches typically follow the "retrieve and read" pipeline
and employ BERT-based reranker to filter retrieved documents before feeding
them into the reader module. The BERT retriever takes as input the
concatenation of question and each retrieved document. Despite the success of
these approaches in terms of QA accuracy, due to the concatenation, they can
barely handle high-throughput of incoming questions each with a large
collection of retrieved documents. To address the efficiency problem, we
propose DC-BERT, a decoupled contextual encoding framework that has dual BERT
models: an online BERT which encodes the question only once, and an offline
BERT which pre-encodes all the documents and caches their encodings. On SQuAD
Open and Natural Questions Open datasets, DC-BERT achieves 10x speedup on
document retrieval, while retaining most (about 98%) of the QA performance
compared to state-of-the-art approaches for open-domain question answering.
01 Dec 2017

We propose a new method that uses deep learning techniques to solve the inverse problems. The inverse problem is cast in the form of learning an end-to-end mapping from observed data to the ground-truth. Inspired by the splitting strategy widely used in regularized iterative algorithm to tackle inverse problems, the mapping is decomposed into two networks, with one handling the inversion of the physical forward model associated with the data term and one handling the denoising of the output from the former network, i.e., the inverted version, associated with the prior/regularization term. The two networks are trained jointly to learn the end-to-end mapping, getting rid of a two-step training. The training is annealing as the intermediate variable between these two networks bridges the gap between the input (the degraded version of output) and output and progressively approaches to the ground-truth. The proposed network, referred to as InverseNet, is flexible in the sense that most of the existing end-to-end network structure can be leveraged in the first network and most of the existing denoising network structure can be used in the second one. Extensive experiments on both synthetic data and real datasets on the tasks, motion deblurring, super-resolution, and colorization, demonstrate the efficiency and accuracy of the proposed method compared with other image processing algorithms.
11 Oct 2020

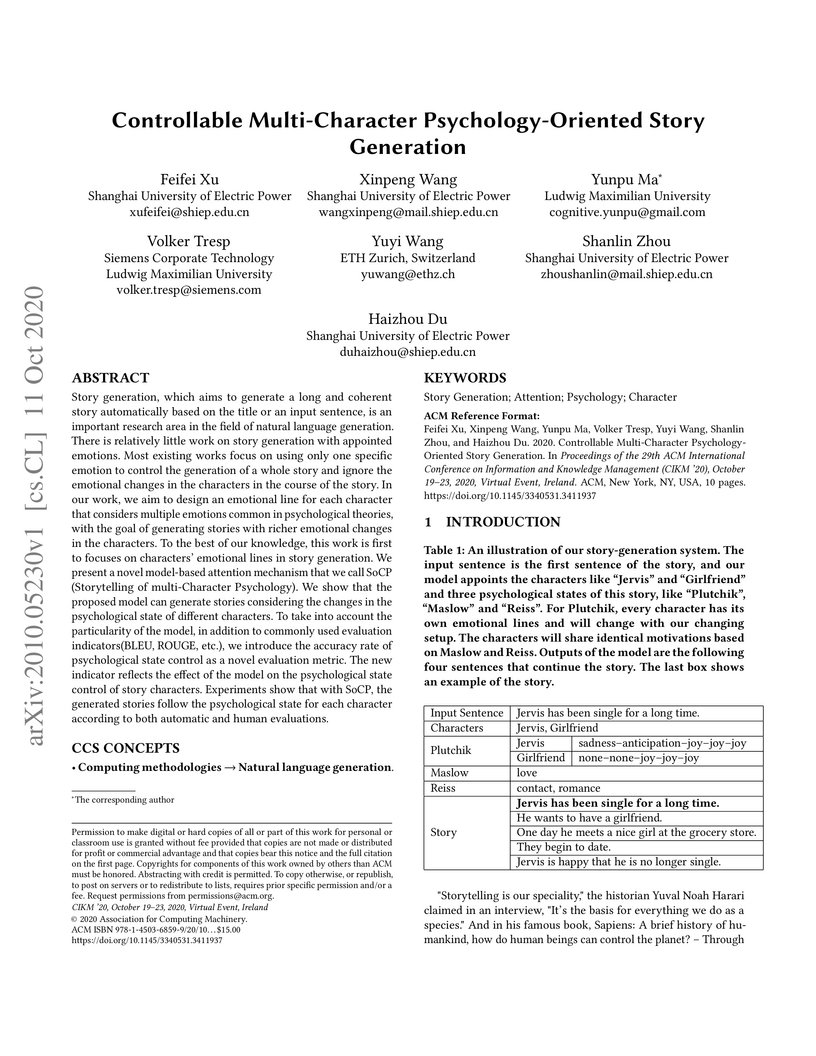
Story generation, which aims to generate a long and coherent story
automatically based on the title or an input sentence, is an important research
area in the field of natural language generation. There is relatively little
work on story generation with appointed emotions. Most existing works focus on
using only one specific emotion to control the generation of a whole story and
ignore the emotional changes in the characters in the course of the story. In
our work, we aim to design an emotional line for each character that considers
multiple emotions common in psychological theories, with the goal of generating
stories with richer emotional changes in the characters. To the best of our
knowledge, this work is first to focuses on characters' emotional lines in
story generation. We present a novel model-based attention mechanism that we
call SoCP (Storytelling of multi-Character Psychology). We show that the
proposed model can generate stories considering the changes in the
psychological state of different characters. To take into account the
particularity of the model, in addition to commonly used evaluation
indicators(BLEU, ROUGE, etc.), we introduce the accuracy rate of psychological
state control as a novel evaluation metric. The new indicator reflects the
effect of the model on the psychological state control of story characters.
Experiments show that with SoCP, the generated stories follow the psychological
state for each character according to both automatic and human evaluations.
08 Nov 2020

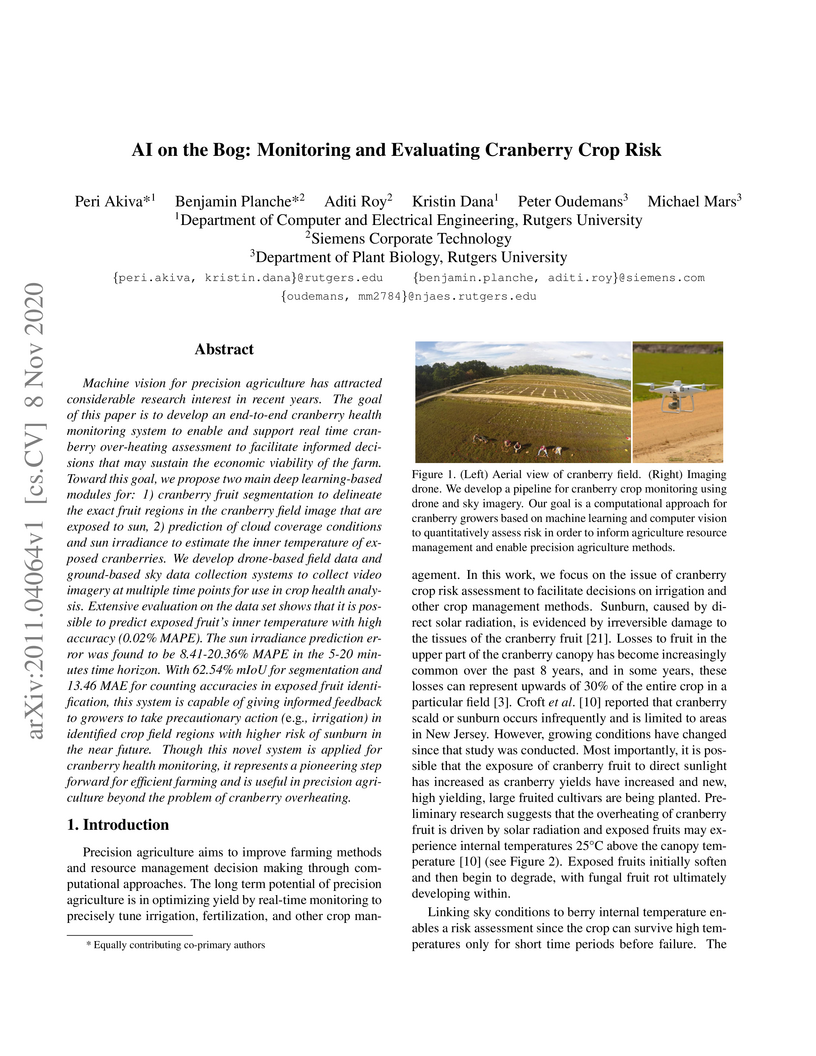
Machine vision for precision agriculture has attracted considerable research interest in recent years. The goal of this paper is to develop an end-to-end cranberry health monitoring system to enable and support real time cranberry over-heating assessment to facilitate informed decisions that may sustain the economic viability of the farm. Toward this goal, we propose two main deep learning-based modules for: 1) cranberry fruit segmentation to delineate the exact fruit regions in the cranberry field image that are exposed to sun, 2) prediction of cloud coverage conditions and sun irradiance to estimate the inner temperature of exposed cranberries. We develop drone-based field data and ground-based sky data collection systems to collect video imagery at multiple time points for use in crop health analysis. Extensive evaluation on the data set shows that it is possible to predict exposed fruit's inner temperature with high accuracy (0.02% MAPE). The sun irradiance prediction error was found to be 8.41-20.36% MAPE in the 5-20 minutes time horizon. With 62.54% mIoU for segmentation and 13.46 MAE for counting accuracies in exposed fruit identification, this system is capable of giving informed feedback to growers to take precautionary action (e.g. irrigation) in identified crop field regions with higher risk of sunburn in the near future. Though this novel system is applied for cranberry health monitoring, it represents a pioneering step forward for efficient farming and is useful in precision agriculture beyond the problem of cranberry overheating.

24 Jul 2018
Domain adaptation is an important tool to transfer knowledge about a task
(e.g. classification) learned in a source domain to a second, or target domain.
Current approaches assume that task-relevant target-domain data is available
during training. We demonstrate how to perform domain adaptation when no such
task-relevant target-domain data is available. To tackle this issue, we propose
zero-shot deep domain adaptation (ZDDA), which uses privileged information from
task-irrelevant dual-domain pairs. ZDDA learns a source-domain representation
which is not only tailored for the task of interest but also close to the
target-domain representation. Therefore, the source-domain task of interest
solution (e.g. a classifier for classification tasks) which is jointly trained
with the source-domain representation can be applicable to both the source and
target representations. Using the MNIST, Fashion-MNIST, NIST, EMNIST, and SUN
RGB-D datasets, we show that ZDDA can perform domain adaptation in
classification tasks without access to task-relevant target-domain training
data. We also extend ZDDA to perform sensor fusion in the SUN RGB-D scene
classification task by simulating task-relevant target-domain representations
with task-relevant source-domain data. To the best of our knowledge, ZDDA is
the first domain adaptation and sensor fusion method which requires no
task-relevant target-domain data. The underlying principle is not particular to
computer vision data, but should be extensible to other domains.

30 Jan 2018
Transactive energy systems (TES) are emerging as a transformative solution
for the problems faced by distribution system operators due to an increase in
the use of distributed energy resources and a rapid acceleration in renewable
energy generation. These, on one hand, pose a decentralized power system
controls problem, requiring strategic microgrid control to maintain stability
for the community and for the utility. On the other hand, they require robust
financial markets operating on distributed software platforms that preserve
privacy. In this paper, we describe the implementation of a novel,
blockchain-based transactive energy system. We outline the key requirements and
motivation of this platform, describe the lessons learned, and provide a
description of key architectural components of this system.
30 Jan 2018
Transactive microgrids are emerging as a transformative solution for the
problems faced by distribution system operators due to an increase in the use
of distributed energy resources and a rapid acceleration in renewable energy
generation, such as wind and solar power. Distributed ledgers have recently
found widespread interest in this domain due to their ability to provide
transactional integrity across decentralized computing nodes. However, the
existing state of the art has not focused on the privacy preservation
requirement of these energy systems -- the transaction level data can provide
much greater insights into a prosumer's behavior compared to smart meter data.
There are specific safety requirements in transactive microgrids to ensure the
stability of the grid and to control the load. To fulfil these requirements,
the distribution system operator needs transaction information from the grid,
which poses a further challenge to the privacy-goals. This problem is made
worse by requirement for off-blockchain communication in these networks. In
this paper, we extend a recently developed trading workflow called PETra and
describe our solution for communication and transactional anonymity.
There are no more papers matching your filters at the moment.
