05 Apr 2024

A comprehensive review systematically compiles the theories, physical implementations, and applications of quantum walk computing, highlighting its potential as a feasible path for application-specific quantum computing, particularly within the noisy intermediate-scale quantum era. It details advancements across various platforms, notably integrated photonics, and categorizes diverse applications in quantum computing, simulation, information processing, and graph theory.
19 Aug 2025

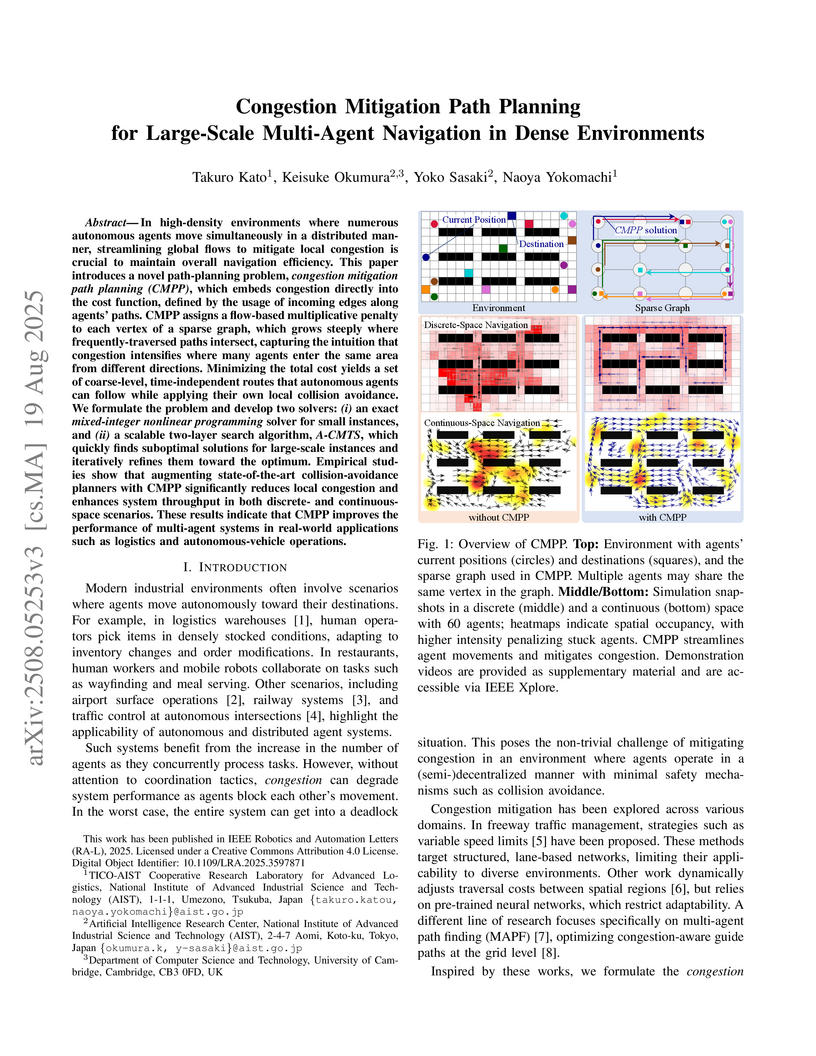
Researchers from AIST developed Congestion Mitigation Path Planning (CMPP), a system that guides thousands of autonomous agents in dense environments by penalizing multi-directional merges on a sparse graph. This approach demonstrated a 99.0% success rate in continuous space navigation and up to a 58.1% throughput increase in simulated warehouse environments, outperforming existing collision avoidance methods.

16 Oct 2025
 CNRS
CNRS the University of TokyoNational Institute of Advanced Industrial Science and TechnologyObservatoire de ParisInstitute of Science TokyoRikkyo UniversityChiba Institute of TechnologyJapan Aerospace Exploration AgencyUniversity of La LagunaArtificial Intelligence Research CenterInstitute of Space and Astronautical ScienceSorbonne Universit
ePlanetary Exploration Research Center (PERC)Instituto de Astrof
´ısica de Canarias (IAC)Geological Survey of Japan (GSJ)Universit
e PSLCY Cergy Paris Universit
eUniversit
´e Paris-Cit
´e
the University of TokyoNational Institute of Advanced Industrial Science and TechnologyObservatoire de ParisInstitute of Science TokyoRikkyo UniversityChiba Institute of TechnologyJapan Aerospace Exploration AgencyUniversity of La LagunaArtificial Intelligence Research CenterInstitute of Space and Astronautical ScienceSorbonne Universit
ePlanetary Exploration Research Center (PERC)Instituto de Astrof
´ısica de Canarias (IAC)Geological Survey of Japan (GSJ)Universit
e PSLCY Cergy Paris Universit
eUniversit
´e Paris-Cit
´eObservations of exoplanet transits by small satellites have gained increasing attention for reducing detection biases. However, no unambiguous detection of an exoplanet has yet been demonstrated using optics with apertures smaller than 60 mm. Here, we investigated the detectability of exoplanet transits using the telescopic Optical Navigation Camera (ONC-T) onboard the Hayabusa2 spacecraft, which has an effective aperture of only 15 mm. We conducted transit observations of the hot Jupiters WASP-189 b and MASCARA-1 b, collecting data for ten and four events, respectively. The transit signal was detected with a signal-to-noise ratio (SNR) of 13 for WASP-189 b and 8 for MASCARA-1 b for each event. Stacking all events improved the SNR to 40 and 16, respectively. The transit mid-times of each event were measured with a precision of 6 minutes and were consistent with Transiting Exoplanet Survey Satellite (TESS) data to within 2 minutes. The planet-to-star radius ratio was determined with an absolute precision of 0.004 (6% relative) and agreed with TESS results to within 0.002 (3% relative). The recent ONC-T and TESS data enabled an update to the planetary ephemerides. We report a 4 sigma discrepancy between the updated orbital period of MASCARA-1 b and previously reported values. ONC-T sets a new record for the smallest-aperture instrument to detect an exoplanet transit from space, advancing the frontier of exoplanet science with miniature instrumentation. Our results suggest that optics as small as ONC-T may be capable of detecting transiting long-period Jupiters: a population that remains underrepresented in current surveys.

24 Dec 2024
In this paper, we present the SimDoc system, a simplification model considering simplicity, readability, and discourse aspects, such as coherence. In the past decade, the progress of the Text Simplification (TS) field has been mostly shown at a sentence level, rather than considering paragraphs or documents, a setting from which most TS audiences would benefit. We propose a simplification system that is initially fine-tuned with professionally created corpora. Further, we include multiple objectives during training, considering simplicity, readability, and coherence altogether. Our contributions include the extension of professionally annotated simplification corpora by the association of existing annotations into (complex text, simple text, readability label) triples to benefit from readability during training. Also, we present a comparative analysis in which we evaluate our proposed models in a zero-shot, few-shot, and fine-tuning setting using document-level TS corpora, demonstrating novel methods for simplification. Finally, we show a detailed analysis of outputs, highlighting the difficulties of simplification at a document level.

23 Jul 2024
The field of natural language processing (NLP) has seen remarkable
advancements, thanks to the power of deep learning and foundation models.
Language models, and specifically BERT, have been key players in this progress.
In this study, we trained and introduced two new BERT models using Persian
data. We put our models to the test, comparing them to seven existing models
across 14 diverse Persian natural language understanding (NLU) tasks. The
results speak for themselves: our larger model outperforms the competition,
showing an average improvement of at least +2.8 points. This highlights the
effectiveness and potential of our new BERT models for Persian NLU tasks.

26 Sep 2018


Integrated optics is an engineering solution proposed for exquisite control
of photonic quantum information. Here we use silicon photonics and the linear
combination of quantum operators scheme to realise a fully programmable
two-qubit quantum processor. The device is fabricated with readily available
CMOS based processing and comprises four nonlinear photon-sources, four
filters, eighty-two beam splitters and fifty-eight individually addressable
phase shifters. To demonstrate performance, we programmed the device to
implement ninety-eight various two-qubit unitary operations (with average
quantum process fidelity of 93.24.5%), a two-qubit quantum approximate
optimization algorithm and efficient simulation of Szegedy directed quantum
walks. This fosters further use of the linear combination architecture with
silicon photonics for future photonic quantum processors.
26 Aug 2023
 National University of Singapore
National University of Singapore Tsinghua University
Tsinghua University Peking UniversityNational University of Defense TechnologyBeijing University of Posts and Telecommunications
Peking UniversityNational University of Defense TechnologyBeijing University of Posts and Telecommunications Shandong UniversityTianjin Artificial Intelligence Innovation CenterNational Innovation Institute of Defense TechnologyBeijing Institute of Basic Medical SciencesBeijing Institute of Technology
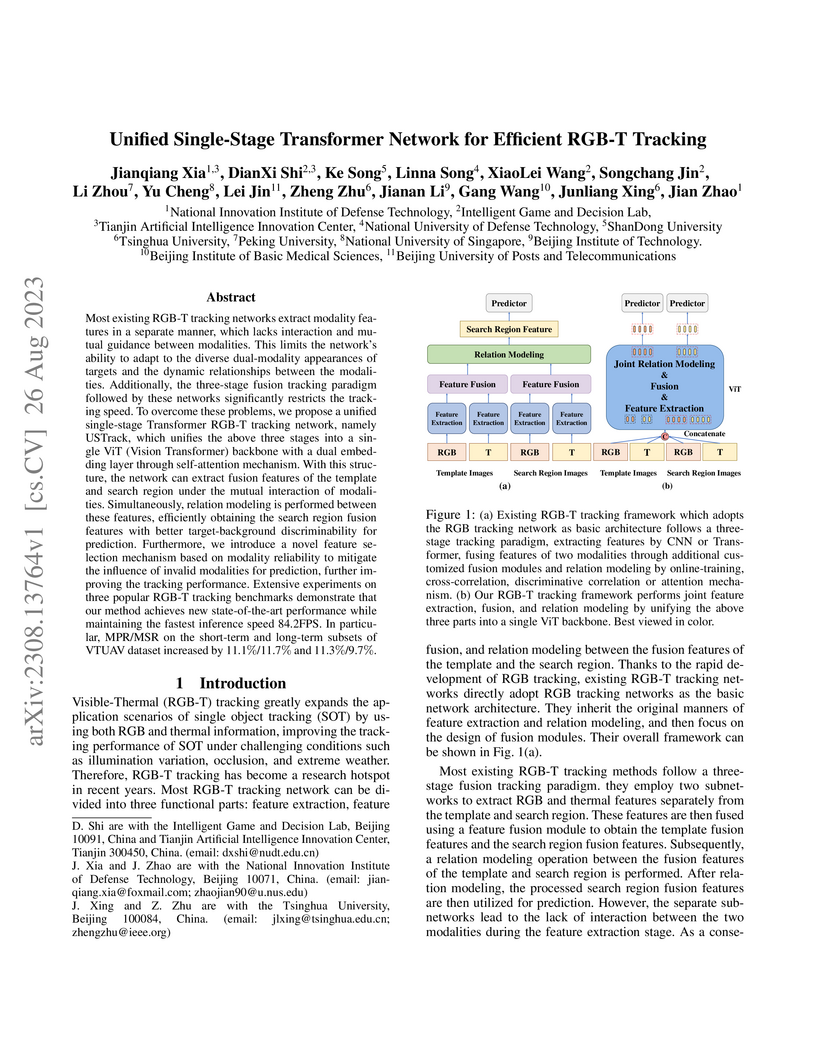
Shandong UniversityTianjin Artificial Intelligence Innovation CenterNational Innovation Institute of Defense TechnologyBeijing Institute of Basic Medical SciencesBeijing Institute of TechnologyMost existing RGB-T tracking networks extract modality features in a separate
manner, which lacks interaction and mutual guidance between modalities. This
limits the network's ability to adapt to the diverse dual-modality appearances
of targets and the dynamic relationships between the modalities. Additionally,
the three-stage fusion tracking paradigm followed by these networks
significantly restricts the tracking speed. To overcome these problems, we
propose a unified single-stage Transformer RGB-T tracking network, namely
USTrack, which unifies the above three stages into a single ViT (Vision
Transformer) backbone with a dual embedding layer through self-attention
mechanism. With this structure, the network can extract fusion features of the
template and search region under the mutual interaction of modalities.
Simultaneously, relation modeling is performed between these features,
efficiently obtaining the search region fusion features with better
target-background discriminability for prediction. Furthermore, we introduce a
novel feature selection mechanism based on modality reliability to mitigate the
influence of invalid modalities for prediction, further improving the tracking
performance. Extensive experiments on three popular RGB-T tracking benchmarks
demonstrate that our method achieves new state-of-the-art performance while
maintaining the fastest inference speed 84.2FPS. In particular, MPR/MSR on the
short-term and long-term subsets of VTUAV dataset increased by
11.1/11.7 and 11.3/9.7.
10 Jul 2025
The target defense problem (TDP) for unmanned surface vehicles (USVs) concerns intercepting an adversarial USV before it breaches a designated target region, using one or more defending USVs. A particularly challenging scenario arises when the attacker exhibits superior maneuverability compared to the defenders, significantly complicating effective interception. To tackle this challenge, this letter introduces ARBoids, a novel adaptive residual reinforcement learning framework that integrates deep reinforcement learning (DRL) with the biologically inspired, force-based Boids model. Within this framework, the Boids model serves as a computationally efficient baseline policy for multi-agent coordination, while DRL learns a residual policy to adaptively refine and optimize the defenders' actions. The proposed approach is validated in a high-fidelity Gazebo simulation environment, demonstrating superior performance over traditional interception strategies, including pure force-based approaches and vanilla DRL policies. Furthermore, the learned policy exhibits strong adaptability to attackers with diverse maneuverability profiles, highlighting its robustness and generalization capability. The code of ARBoids will be released upon acceptance of this letter.

28 Aug 2019
Recently, the emerging bio-inspired event cameras have demonstrated potentials for a wide range of robotic applications in dynamic environments. In this paper, we propose a novel fast and asynchronous event-based corner detection method which is called FA-Harris. FA-Harris consists of several components, including an event filter, a Global Surface of Active Events (G-SAE) maintaining unit, a corner candidate selecting unit, and a corner candidate refining unit. The proposed G-SAE maintenance algorithm and corner candidate selection algorithm greatly enhance the real-time performance for corner detection, while the corner candidate refinement algorithm maintains the accuracy of performance by using an improved event-based Harris detector. Additionally, FA-Harris does not require artificially synthesized event-frames and can operate on asynchronous events directly. We implement the proposed method in C++ and evaluate it on public Event Camera Datasets. The results show that our method achieves approximately 8x speed-up when compared with previously reported event-based Harris detector, and with no compromise on the accuracy of performance.

17 Mar 2024
The rapid development of deep learning has significant implications for the advancement of Computational Fluid Dynamics (CFD). Currently, most pixel-grid-based deep learning methods for flow field prediction exhibit significantly reduced accuracy in predicting boundary layer flows and poor adaptability to geometric shapes. Although Graph Neural Network (GNN) models for unstructured grids based unsteady flow prediction have better geometric adaptability, these models suffer from error accumulation in long-term predictions of unsteady flows. More importantly, fully data-driven models often require extensive training time, greatly limiting the rapid update and iteration speed of deep learning models when facing more complex unsteady flows. Therefore, this paper aims to balance the demands for training overhead and prediction accuracy by integrating physical constraints based on the finite volume method into the loss function of the graph neural network. Additionally, it incorporates a twice-massage aggregation mechanism inspired by the extended stencil method to enhance the unsteady flow prediction accuracy and geometric shape generalization ability of the graph neural network model on unstructured grids. We focus particularly on the model's predictive accuracy within the boundary layer. Compared to fully data-driven methods, our model achieves better predictive accuracy and geometric shape generalization ability in a shorter training time.

28 Jul 2025


We report on the frequency conversions of terahertz (THz) waves at ultrafast time boundaries created via femtosecond laser-induced air-to-plasma phase transitions. Our combined experimental and theoretical approach reveals that the abrupt change in refractive index at the ultrafast time boundaries drives both the red and blue shifts over the broadband THz spectrum due to the dispersive plasma, with distinctive amplitude variations. The present study contrasts these effects with those from spatial boundaries, highlighting the superior efficacy of temporal manipulations for spectral engineering. These findings not only deepen the understanding of light-matter interactions in time-varying media but also pave the way for innovative applications in THz technology and lay the groundwork for the observation of temporal reflection effects, photonic time crystals, and spatio-temporally modulated matter.
21 Mar 2021
A Unifying Framework for Adaptive Radar Detection in the Presence of Multiple Alternative Hypotheses
A Unifying Framework for Adaptive Radar Detection in the Presence of Multiple Alternative Hypotheses
In this paper, we develop a new elegant framework relying on the
Kullback-Leibler Information Criterion to address the design of one-stage
adaptive detection architectures for multiple hypothesis testing problems.
Specifically, at the design stage, we assume that several alternative
hypotheses may be in force and that only one null hypothesis exists. Then,
starting from the case where all the parameters are known and proceeding until
the case where the adaptivity with respect to the entire parameter set is
required, we come up with decision schemes for multiple alternative hypotheses
consisting of the sum between the compressed log-likelihood ratio based upon
the available data and a penalty term accounting for the number of unknown
parameters. The latter rises from suitable approximations of the
Kullback-Leibler Divergence between the true and a candidate probability
density function. Interestingly, under specific constraints, the proposed
decision schemes can share the constant false alarm rate property by virtue of
the Invariance Principle. Finally, we show the effectiveness of the proposed
framework through the application to examples of practical value in the context
of radar detection also in comparison with two-stage competitors. This analysis
highlights that the architectures devised within the proposed framework
represent an effective means to deal with detection problems where the
uncertainty on some parameters leads to multiple alternative hypotheses.

25 Dec 2024

Ubiquitous intelligence has been widely recognized as a critical vision of
the future sixth generation (6G) networks, which implies the intelligence over
the whole network from the core to the edge including end devices.
Nevertheless, fulfilling such vision, particularly the intelligence at the
edge, is extremely challenging, due to the limited resources of edge devices as
well as the ubiquitous coverage envisioned by 6G. To empower the edge
intelligence, in this article, we propose a novel framework called AGIFL
(Air-Ground Integrated Federated Learning), which organically integrates
air-ground integrated networks and federated learning (FL). In the AGIFL,
leveraging the flexible on-demand 3D deployment of aerial nodes such as
unmanned aerial vehicles (UAVs), all the nodes can collaboratively train an
effective learning model by FL. We also conduct a case study to evaluate the
effect of two different deployment schemes of the UAV over the learning and
network performance. Last but not the least, we highlight several technical
challenges and future research directions in the AGIFL.

28 Aug 2022
With photonics, the quantum computational advantage has been demonstrated on the task of boson sampling. Next, developing quantum-enhanced approaches for practical problems becomes one of the top priorities for photonic systems. Quantum walks are powerful kernels for developing new and useful quantum algorithms. Here we realize large-scale quantum walks using a fully programmable photonic quantum computing system. The system integrates a silicon quantum photonic chip, enabling the simulation of quantum walk dynamics on graphs with up to 400 vertices and possessing full programmability over quantum walk parameters, including the particle property, initial state, graph structure, and evolution time. In the 400-dimensional Hilbert space, the average fidelity of random entangled quantum states after the whole on-chip circuit evolution reaches as high as 94.291.28. With the system, we demonstrated exponentially faster hitting and quadratically faster mixing performance of quantum walks over classical random walks, achieving more than two orders of magnitude of enhancement in the experimental hitting efficiency and almost half of the reduction in the experimental evolution time for mixing. We utilize the system to implement a series of quantum applications, including measuring the centrality of scale-free networks, searching targets on Erdös-Rényi networks, distinguishing non-isomorphic graph pairs, and simulating the topological phase of higher-order topological insulators. Our work shows one feasible path for quantum photonics to address applications of practical interests in the near future.

30 Apr 2021
The Einstein-Podolsky-Rosen (EPR) paradox is one of the milestones in quantum
foundations, arising from the lack of local realistic description of quantum
mechanics. The EPR paradox has stimulated an important concept of "quantum
nonlocality", which manifests itself by three different types: quantum
entanglement, quantum steering, and Bell nonlocality. Although Bell nonlocality
is more often used to show the "quantum nonlocality", the original EPR paradox
is essentially a steering paradox. In this work, we formulate the original EPR
steering paradox into a contradiction equality,thus making it amenable to an
experimental verification. We perform an experimental test of the steering
paradox in a two-qubit scenario. Furthermore, by starting from the steering
paradox, we generate a generalized linear steering inequality and transform
this inequality into a mathematically equivalent form, which is more friendly
for experimental implementation, i.e., one may only measure the observables in
-, -, or -axis of the Bloch sphere, rather than other arbitrary
directions. We also perform experiments to demonstrate this scheme. Within the
experimental errors, the experimental results coincide with the theoretical
predictions. Our results deepen the understanding of quantum foundations and
provide an efficient way to detect the steerability of quantum states.
14 Feb 2024
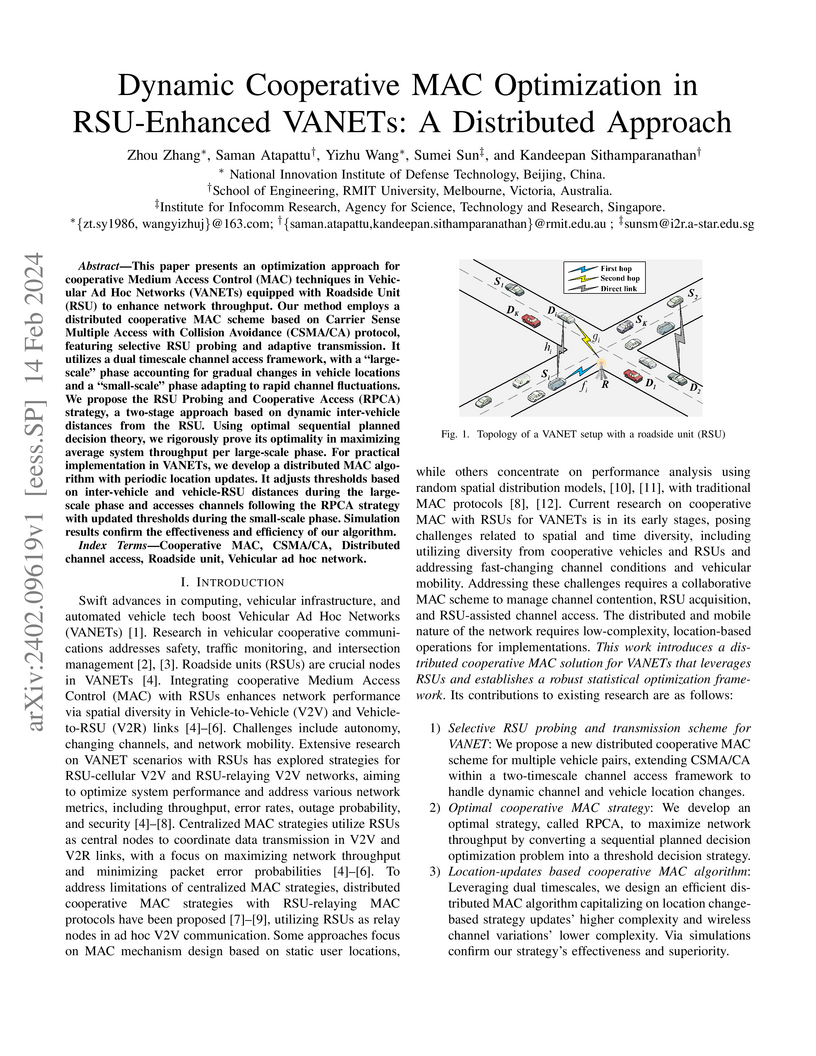
This paper presents an optimization approach for cooperative Medium Access
Control (MAC) techniques in Vehicular Ad Hoc Networks (VANETs) equipped with
Roadside Unit (RSU) to enhance network throughput. Our method employs a
distributed cooperative MAC scheme based on Carrier Sense Multiple Access with
Collision Avoidance (CSMA/CA) protocol, featuring selective RSU probing and
adaptive transmission. It utilizes a dual timescale channel access framework,
with a ``large-scale'' phase accounting for gradual changes in vehicle
locations and a ``small-scale'' phase adapting to rapid channel fluctuations.
We propose the RSU Probing and Cooperative Access (RPCA) strategy, a two-stage
approach based on dynamic inter-vehicle distances from the RSU. Using optimal
sequential planned decision theory, we rigorously prove its optimality in
maximizing average system throughput per large-scale phase. For practical
implementation in VANETs, we develop a distributed MAC algorithm with periodic
location updates. It adjusts thresholds based on inter-vehicle and vehicle-RSU
distances during the large-scale phase and accesses channels following the RPCA
strategy with updated thresholds during the small-scale phase. Simulation
results confirm the effectiveness and efficiency of our algorithm.

03 Aug 2020
Quantum key distribution (QKD) has been proved to be
information-theoretically secure in theory. Unfortunately, the imperfect
devices in practice compromise its security. Thus, to improve the security
property of practical QKD systems, a commonly used method is to patch the
loopholes in the existing QKD systems. However, in this work, we show an
adversary's capability of exploiting the imperfection of the patch itself to
bypass the patch. Specifically, we experimentally demonstrate that, in the
detector under test, the patch of photocurrent monitor against the detector
blinding attack can be defeated by the pulse illumination attack proposed in
this paper. We also analyze the secret key rate under the pulse illumination
attack, which theoretically confirmed that Eve can conduct the attack to learn
the secret key. This work indicates the importance of inspecting the security
loopholes in a detection unit to further understand their impacts on a QKD
system. The method of pulse illumination attack can be a general testing item
in the security evaluation standard of QKD.

27 Sep 2021
The unremitting pursuit for quantum advantages gives rise to the discovery of
a quantum-enhanced randomness processing named quantum Bernoulli factory (QBF).
This quantum enhanced process can show its priority over the corresponding
classical process through readily available experimental resources, thus in the
near term it may be capable of accelerating the applications of classical
Bernoulli factories, such as the widely used sampling algorithms. In this work,
we provide the framework analysis of the QBF. We thoroughly analyze the quantum
state evolution in this process, discovering the field structure of the
constructible quantum states. Our framework analysis shows that naturally, the
previous works can be described as specific instances of this framework. Then,
as a proof of principle, we experimentally demonstrate this framework via an
entangled two-photon source along with a reconfigurable photonic logic, and
show the advantages of the QBF over the classical model through a classically
infeasible instance. These results may stimulate the discovery of advantages of
the quantum randomness processing in a wider range of tasks, as well as its
potential applications.
02 Oct 2024
Graphene has the great potential to be used for humidity sensing due to
ultrahigh surface area and conductivity. However, the impact of different
atomic layers of graphene on SiO2/Si substrate on the humidity sensing have not
been studied yet. In this paper, we fabricated three types of humidity sensors
on SiO2/Si substrate based on one to three atomic layers of graphene, in which
the sensing areas of graphene are 75 {\mu}m * 72 {\mu}m and 45 {\mu}m * 72
{\mu}m, respectively. We studied the impact of both the number of atomic layers
of graphene and the sensing areas of graphene on the responsivity and
response/recovery time of the prepared graphene-based humidity sensors. We
found the relative resistance change of the prepared devices decreased with the
increase of number of atomic layers of graphene under the same change of
relative humidity. Further, devices based on tri-layer graphene showed the
fastest response/recovery time while devices based on double-layer graphene
showed the slowest response/recovery time. Finally, we chose the devices based
on double-layer graphene that have relatively good responsivity and stability
for application in respiration monitoring and contact-free finger monitoring.

10 Jul 2019
LIDAR is one of the most important sensors for Unmanned Ground Vehicles
(UGV). Object detection and classification based on lidar point cloud is a key
technology for UGV. In object detection and classification, the mutual
occlusion between neighboring objects is an important factor affecting the
accuracy. In this paper, we consider occlusion as an intrinsic property of the
point cloud data. We propose a novel approach that explicitly model the
occlusion. The occlusion property is then taken into account in the subsequent
classification step. We perform experiments on the KITTI dataset. Experimental
results indicate that by utilizing the occlusion property that we modeled, the
classifier obtains much better performance.
There are no more papers matching your filters at the moment.
